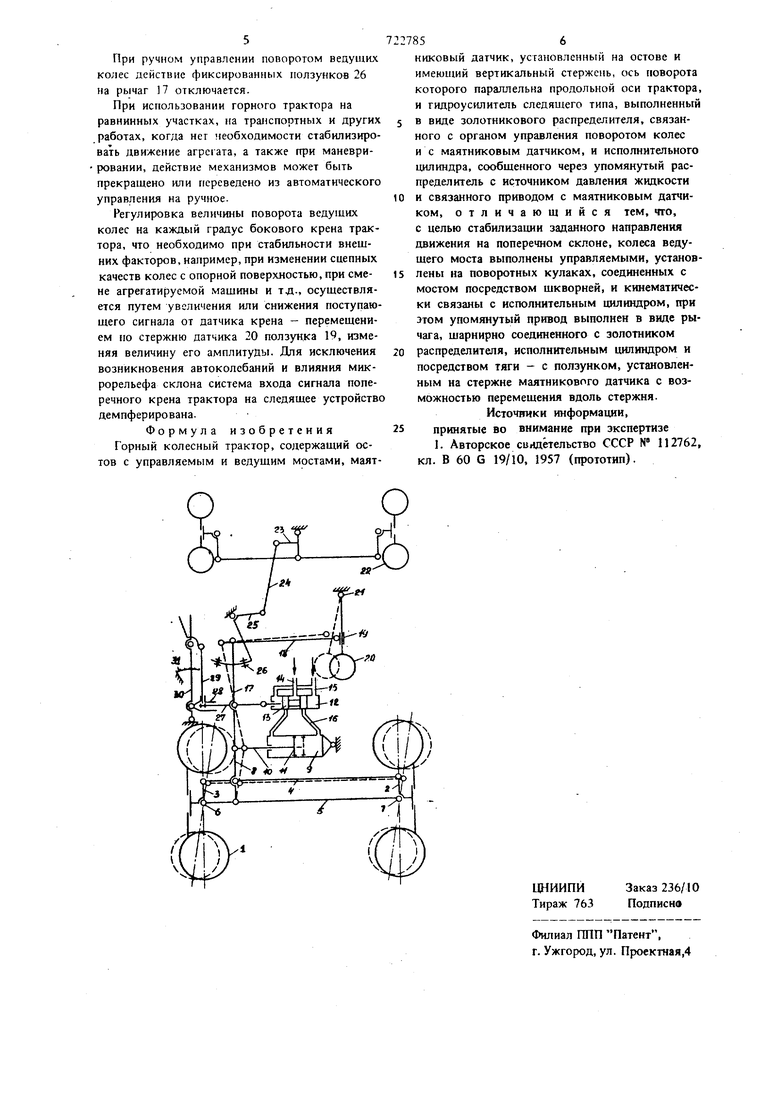
Изобретение относится к области транспортного машиностроения, а именно к горным тракторам. Известен горный колесный трактор, содерж щий остов с управляемым и ведущим мостами, маятниковый датчик, установленный на основе и имеющий вертикальный стержень, ось поворота которого параллельна продольной оси трактора, и гидроусилитель следящего ти па, выполненный в виде золотникового распре делителя, связанного с органом управления поворотом колес и с маятниковым датчиком, и исполнительного цилиндра, сообщенного через упомянутый распределитель с источником давления жидкости и связанного приводом с маятниковым датчиком .1. Недостатком известного трактора является то, что при движении трактора с поперечным креном в направлении поперек склона или по косогору под воздействием составляющей силы тяжести происходит отклонение его продольно оси от фактического направления движения, задние колеса сползают вниз по склону, след их не совпадает со следом передних колес. Это приводит к нарушению технолопшеского процесса, выполняемого машиной. Из-за сползания ведущих задних колес и вызванное этим отклонение продольной оси трактора, например, посев пропащных и их междурядная обработка на склонах невозможны, что сдерживает механизацию сельскохозяйственного производства горной зоны. Целью изобретения является стабилизация заданного направления движения на поперечном склоне. Это достигается тем, что в горном тракторе ведущие колеса выполнены управляемыми, установлены на поворотных кулаках, соединенных с мостом посредством шкворней, и кипе матически связаны с исполнительным цилиндром, при этом упомянутый гфивод выполнен в виде рычага, шарнирно соединенного с золотником распределителя, исполнительным цилиндром и посредством тяги - с ползунком, установленным на стержне маятникового датчика с возможностью перемещения вдоль стержня. На чертеже изображена схема горного трактора.
Горный трактор содержит ведущие колеса 1 с механизмом поворота, выполненным в виде параплелограмма, состоящего из поворотных кулаков 2 и 3, соединенных между собой тягой 4 и связанных с мостом 5 посредством шкворней 6 и 7. Механизм поворота соединен рычагом 8 с гидроусилителем, который состоит из связанного с остовом трактора силового гил.роцилкнлра 9, имеющего илток 10 с поршнем И, и распределителя 2 с золотником 13. Золотник 13 разделяет внутреннюю полость распределителя 12 на полость высокого давления, сообщенную нагнетательным трубопроводом 14, и полость низкого давления, сообщенную со сливным трубопроводом 15, соединенных с гидросистемой трактора. Посредством каналов 16 полости низкого и высокого давления распределителя 12 соединяются с полостя ми гидроцилиндра. Шток 10 и золотник 13 распределителя 12 соединены рычагом 17, обеспечивающим жесткую обратную связь между ними. Далее рычаг 17 связан тягой 18 с ползунком 19 маятникового датчика 20, изображенного на чертеже повернутым в продольной плоскости трактора на 90°. Датчик 20 находится в демпферирующей среде, ось 21 его параллельна продольной оси трактора и может колебаться только в поперечной плоскости трактора Ползунок 19 имеет возможность перемешаться вдоль стержня датчика и фиксироваться на нем Механизм рулевого управления передних колес 22 имеет кронштейн 23, соединенный тягой 24 с кро(П11тейном 25 с двумя фиксируемыми на его секторе ползунками 26, расположенными в зоне рычага 17.
Золотник 13 соединен посредством звеньев 27 и 28 и фиксатора 29 с рычагом 30 ручного управления поворотом ведущих колес, который перемешается по сектору 31.
Передние колеса 22 трактора управляемые.
При въезде трактора на склон маятниковый датчик 20 под действием силы тяжести поворачлвается относительно остова вокруг оси 21 на величину бокового крана трактора. Перемещение датчика тягой 18 передается рычагу 17, начальное движение которого осуществляется вокруг шарнира связи его со штоком 10 гидроцилиндра 9. Это вызывает перемещение золотника 13 распределителя 12 и открытие перепускных окон, один из которых открывается в полости высокого давления рабочей жидкости, другой - в полости слива. В результате рабочая жидкость из гидросистемы трактора по трубопроводу -14 через полость высокого давления распределителя 12 и канал 16 поступает в соответствующую полость гидроцилиндра, перемещает порщень 11 со штоком 10, одновременно освобождая другую полость
22785,.4
через сливной трубоировод 15. Двигаясь, шток 10 посредством рыа а 17 перемещает золотник в обратном направлении, т.е. в сторону перекрытия канала 16. Количество жидкости, посту5 пающей в гидроцилиндр 9 уменьшается, скорость -перемещения штока снижается. При выезде трактора на склон с неизменной крутизной датчик 20 останавливается, золотник под воздействием поршня закрывает перепускные
окна и прекращает подачу жидкости в гидроцилиндр. Система замыкается. При изменении угла крена трактора датчик 20 будет перемещать золотник в обратном направлении. Это вызывает движение всех злеметов также в
15 обратном направлении.
Вместе с коромыслом шток гидроцилиндра перемещает рычаг 8, поворачивая с помощью тяги 4, кулаков 2 и 3 ведущие колеса 1 вокруг шкворней 6 и 7, установленных на мосту
20 5 трактора (на чертеже показано пунктиром). При этом задн.чя часть трактора перемещается вверх по склону, совмещая продольную ось трактора с направлением движения и след ведущих колес I со, следом колес 22, управление которых осуществляется водителем.
С изменением бокового крена датчик крена подает новую команду на гидроусилитель, который в соответствии с поступающей информацией изменяет поворот ведущих колес. Таким образом, согласованные действия распределителя и гидрошишидра составляют единый процесс слежения за поперечным креном трактора и обеспечивают соответствующую крену поворот ведущих колес, удерживая продольную ось тракто35 ра в направлении движения.
При маневрировании трактором водитель, по.чьзуясь Механизмом управления колес 22, с помощью кронштейна 23, тяги 24, кронштейна 25 с фиксируемыми на его секторе пол зумка.ми 26, воздействует на рычаг 17 (дифферешшштьный рычаг), а следовательно и на золотник 13, что приводит к повороту ведуцшх колес в соответствую1;1ую сторону, улучшая манеаренность трактора.
45 ГтсЕюнь связи между механизмом управле-. нкя иаправляюшими колесами и задними устанавливается положением ползунков 26 на секторе кронштейна 25.
SO Перевод управления поворотом . колес из автоматического режима на ручной осушествляется путем перемешения золотника 13 с помощью рычага 30, звеньев 27 и 28, соещшенных фиксатором 29. При автома55 тическом режиме управления поворотом ведущих колес звенья 27 и 28 не фиксированы. Поворот ведущих колес может быть фиксирюван установкой рычага 30 на секторе 31.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛ ЕСНЫЙ ТРАКТОР ДЛЯ РАБОТЫ НА КРУТЫХ СКЛОНАХ | 1972 |
|
SU340572A1 |
| Трактор для работы на склоне | 1989 |
|
SU1726289A1 |
| Колесное транспортное средство | 1980 |
|
SU893606A1 |
| Сельскохозяйственный агрегат | 1984 |
|
SU1192656A1 |
| Привод колес крутосклонного трак-TOPA | 1979 |
|
SU795998A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| КОЛЕСНЫЙ ТРАКТОР ДЛЯ РАБОТЫ НА СКЛОНАХ | 2014 |
|
RU2550567C1 |
| Система автоматического вождения тракторного агрегата на склонах | 1982 |
|
SU1055366A1 |
| Механизм выравнивания крутосклонного трактора | 1980 |
|
SU893594A1 |
| Навесное устройство малогабаритного трактора | 1991 |
|
SU1793832A3 |
