1
Изобретение относится ,к машиностроению и может быть использовано в устройствах для преобразования возвратно-поступательного движения в прерывистое с автоматическим изменением Направления движения.
Известен рычажно-кулачковый механизм, содержащий ведущий ползун, рычаг с роликом, щарнирно соединенный с ведущим ползуном, ведомый ползун с параллельными между собой пазами и скосами, кулачок с двумя скосами и сопрягаемыми с ними пазами, симметричными относительно оси ведущего ползуна 1.
Недостатком этого устройства является относительно небольщие функциональные ВОЗМОЖНОСТИ вследствие ограниченности перемещения ведущего ползуна.
Целью изобретения является расширение функциональных возможностей.
Указанная цель достигается тем, что в 1сота и ширина пазов кулачка равны диаметру ролика, а на ведомом нолзуне выполнено по меньшей мере пять пазов, у второго и предпоследнего из которых близлежащая к оси ведущего ползуна стенка наклонена под острым углом к оси ведущего ползуна, а образующая ее направлена встречно образующей стенки скоса, сопрягаемой с ней.
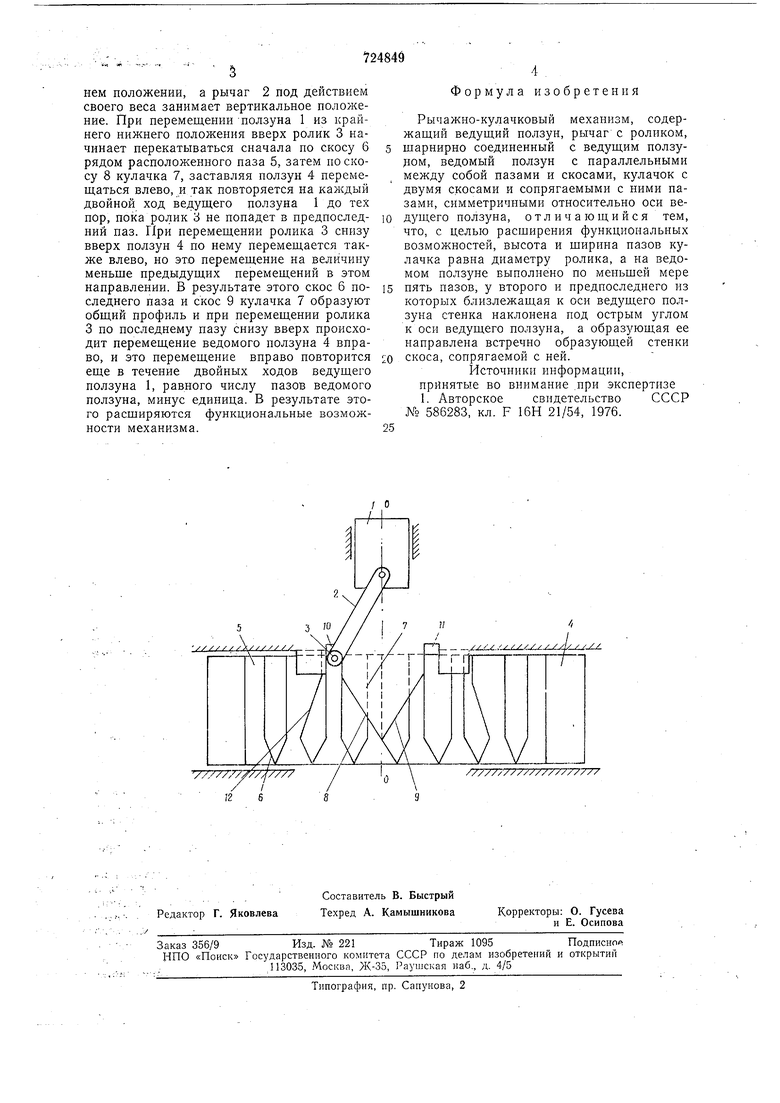
На чертеже изображена кинематическая схема рычажно-кулачкового механизма.
Рычажно-кулачковый механизм содержит ведущий ползун 1, рычаг 2 с роликом 3,
щарнирно соединенный с ведущим ползуном 1, ведомый ползун 4 с параллельными между собой пазами 5 и скосами 6 и кулачок 7 с двумя скосами 8, 9 и сопрягаемыми с ними пазами 10, 11, симметричными
относительно оси О-О ведущего ползуна 1. Высота и ширина пазов кулачка 7 равна диаметру ролика 3, а на ведомом ползуне 4 выполнено по меньшей мере пять пазов, у второго и предпоследнего из которых близлежащая к оси О-О ведущего ползуна 1 стенка 12 наклонена под острым углом к оси ведущего ползуна 1, а образующая ее направлена встречно образующей стенки скоса 6, сопрягаемой с ней.
Механизм работает следующим образом.
При перемещении ведущего ползуна 1 из крайнего верхнего положения вниз ролик 3 рычага 2 перемещается по пазу 5 ползуна
4, причем последний остается неподвижным
вследствие того, что положение ведомого
ползуна 4 фиксируется роликом 3 и пазом
10 на кулачке 7. При выходе ролика 3 из
паза 5 ползун 1 находится в крайнем нижнем положении, а рычаг 2 под действием своего веса занимает вертикальное положение. При перемещении ползуна 1 из крайнего нижнего положения вверх ролик 3 начинает перекатываться сначала по скосу 6 рядом расположенного паза 5, затем по скосу 8 кулачка 7, заставляя ползун 4 перемещаться влево, и так повторяется на каждый двойной ход ведущего ползуна 1 до тех нор, пока ролик 3 не попадет в предпоследНИИ паз. При перемещении ролика 3 снизу вверх ползун 4 по нему перемещается также влево, но это перемещение на величину меньше предыдущих перемещений в этом направлении. В результате этого скос 6 последнего паза и скос 9 кулачка 7 образуют общий профиль и при перемещении ролика 3 по последнему пазу снизу вверх происходит перемещение ведомого ползуна 4 вправо, и это перемещение вправо повторится еще в течение двойных ходов ведущего ползуна 1, равного числу пазов ведомого ползуна, минус единица. В результате этого расширяются функциональные возможности механизма. 4 . Формула изобретения Рычажно-кулачковый механизм, содержащий ведущий ползун, рычаг с роликом, шарнирно соединенный с ведущим ползудом, ведомый ползун с параллельными между собой пазами и скосами, кулачок с двумя скосами и сопрягаемыми с ними пазами, симметричными относительно оси ведущего ползуна, отличающийся тем, что, с целью расширения функциональных возможностей, высота и щирина пазов кулачка равна диаметру ролика, а на ведомом ползуне выполнено по меньшей мере пять пазов, у второго и предпоследнего из которых близлежащая к оси ведущего ползуна стенка наклонена под острым углом к оси ведущего ползуна, а образующая ее направлена встречно образующей стенки скоса, сопрягаемой с ней. Источники информации, принятые во внимание .при экспертизе 1. Авторское свидетельство СССР № 586283, кл. F 16Н 21/54, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Распределительно-подающий механизм стана холодной прокатки труб | 1983 |
|
SU1115822A1 |
| Кулачковый пространственный механизм Рассохина для преобразования вращательного движения в возвратно-поступательное и наоборот | 1988 |
|
SU1504435A1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| Поворотное устройство периодического действия | 1976 |
|
SU682702A1 |
| Летучий отрезной станок | 1984 |
|
SU1234069A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243882C1 |
///7/7777777777 / I
/2 6
r.zz
