словленные ими перемещения промежуточных оснований 5 и //. Ось шлинделя 2 будет заснимать неизменное ноложение относительно корпуса 8, если отиосительные иеремещения иолзуна / и трамежуточных осИ01ваний 5 и // будут одинаковы.
В случае неремещения лолзуна / из среднего положения в осевом направлении на некоторую величину и деформировании накатов 1прул :ин 5 и на большую величину, чем пакетов Пружин 6 и 7, разность .деформаций вызывает смещение ползуна / вки.5 и появление пап-равленн-ых вверх реа.кций со стороны ируж,И;Н 9, 10, 12 и 13.
Под действием реакций со стороиы пружин механизма деления в изогнутых пакетах пружин 3 и 4 появляются дополнительные напряжения ра.стяжения, а в пакетах дружин 6 и 7 - напряжения сжатия.
Сжимаюпще усилия, действующие на изогнутые пружины, увеличивают Их кривизну, растягивающие - уменьшают. Поэтому па/кеты пружин 5 и 7 получат дополнительные ;изгнбные деформаиии и равновесное состояние систв.мы наступит ири условил равенства нулю дефорлгаций пружин 9, 10, 12 и 13 механизма деления в плосКО.СТИ, перпепдикуля1рной направлению перемещения иолзуна (оси шпинделя 2. Такому СОСТОЯНИЮ отвечает равенство перемещений ползуна / отиооительно промежуточного основания 5 и основания 5 относительно корпуса 8.
При нера1венст1ве изгибных дефор.маций па кето1В пружин 9, 10 и 12, 13 аналогичные реакция возникают со стороны па1кетов шружип 3, 4, 6 м 7.
Таким Образом, совместные деформации пружин параллелограммов в еоответств,ии с припЦ|И1По:м м:инимизации потенциальной энергия упругой дефор,.мапии системы исключают смещения ползуна Б плоскости, перпендикулярной оси шпинделя 2. Горизонтальные и вертикальные составляющие знешиих сил, лежащих в плоскостях, перпендикулярных ое.и шпинделя, вызывают в пружинах 3, 4, 6, 7 и 9, 10, 12, 13 иараллеЛ0|грам.мов напряжения растяжения или сжатия, т. е. действуют в направлении .максимальной жесткости параллелограммов.
Расчеты показывают, что деформации растяжаиия ируж.ии параллело;рраммов в десятки раз меньше деформаций изгиба в плоакости, минимальной их податдиноети. Поэтому устройство для пря.молинейиого перемещения обладает незначительной податливоетью в плоскости, перпендикулярной оси шпинделя.
Ф о р .м у л а .изобретения
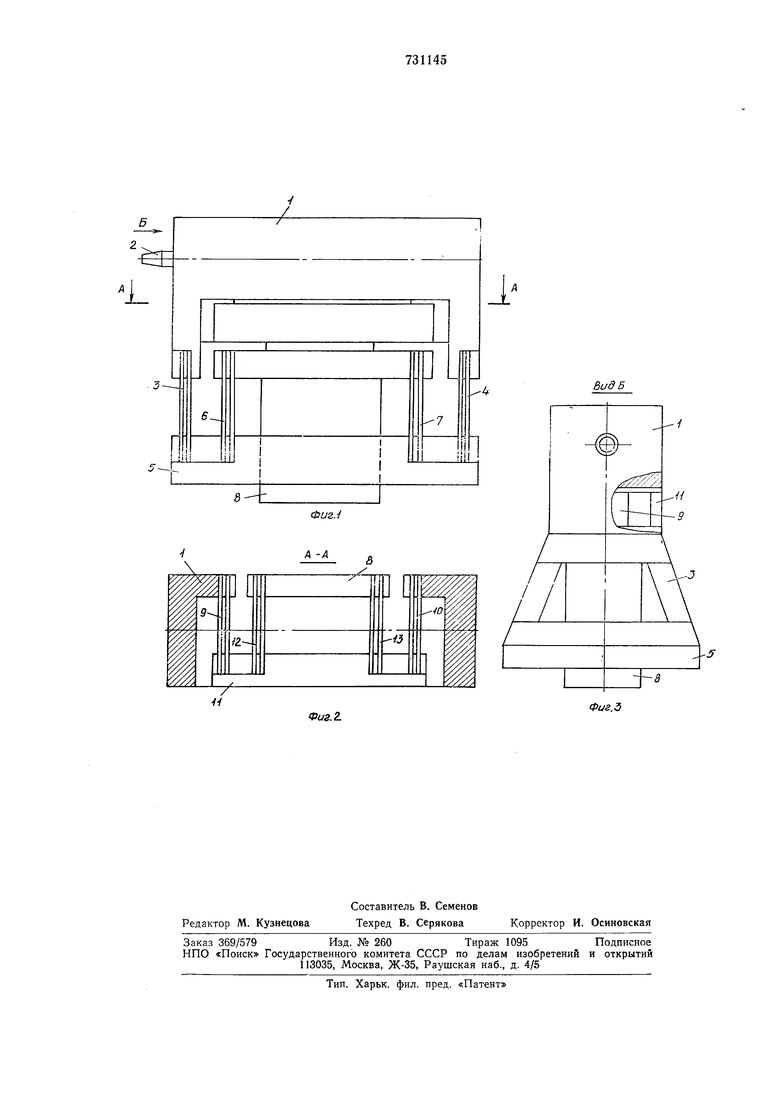
Устройство для прямол-инейного перемещения, €оде)жащее корпус, 1 стаиовлеиный с возможностью перемещения ползун и параллелогра.ммный механизм, состоящий из двух пар.аллелограм.мов с упругими звеньями в плоских пружин, закрепленных концами на -корпусе устройСтва, промежуточном основании и ползуне, отличающееся тем, что, с целью повышения точности иеремещения полз)ша под нагрузкой, оно снабжеио додолнительны.м иараллелогра.ммным мехапизмо.м, плоскость .максимальной иодатливости которого непараллельиа плоскости максимальной податливости основного иараллелограм.много .механизма, приче.м упругие звенья иараллелограм.мов выполнены в виде пакетов плоеких пружин, стороны которых наклонены в ио1иеречной по отношению к направлению перемещения иолзуна плоскости.
Источник -информапии, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР Ло 102373, кл. F 16 Н 21/07, 1955.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для обработки зубьев цилиндрических колес | 1979 |
|
SU878462A2 |
| Станок для обработки зубьев цилиндрических колес | 1978 |
|
SU691258A1 |
| Автоматическая линия для зенкования фасок звеньев гусеницы | 1976 |
|
SU659363A1 |
| Устройство для отрезки мерных труб | 1980 |
|
SU919814A1 |
| Индуктор асинхронного электродвигателя | 1982 |
|
SU1083304A1 |
| Способ обработки заготовок ротационным обжатием и устройство для осуществления способа | 1974 |
|
SU548351A1 |
| Устройство для изготовления зубчатых венцов | 1984 |
|
SU1234021A1 |
| Устройство для резки | 1984 |
|
SU1181789A1 |
| УНИВЕРСАЛЬНЫЙ КРУГЛОШЛИФОВАЛЬНЫЙ СТАНОК | 1992 |
|
RU2050248C1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
Фиг.-/
/2DO
-ю
Ж
/У
Фиг. 2.
Фиг.5
