(54) ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ
1
Изобретение относится к области машиностроения, а именно к кузнечно-прессовому оборудованию.
Известен исполнительный механизм кривошипной машины, содержащий соединительное звено, смонтированное в ползуне, пружину, связанную со станиной и ползуном, а также рычажную систему управления соединительным звеномГО,
Однако известный механизм не обеспечивает включения кривошипных машин с качаюш,имся исполнительным органом, а также происходит быстрый износ соединительного звена.
Цель изобретения - повьшление надежности, увеличение срока службы и расширение области применения.
Для достижения поставленной цели, механизм снабжен шатуном, осью, связанной с рычажной системой управления, при этом соединительное звено выполнено в виде поворотного диска с радиальным пазом, на шагуне выполнены две щеки, в которых выполнены пазы, соединительное звено смонтировано между щеками шатуна на упомянутой оси, причем последняя смонтирована в пазах щек шатуна.
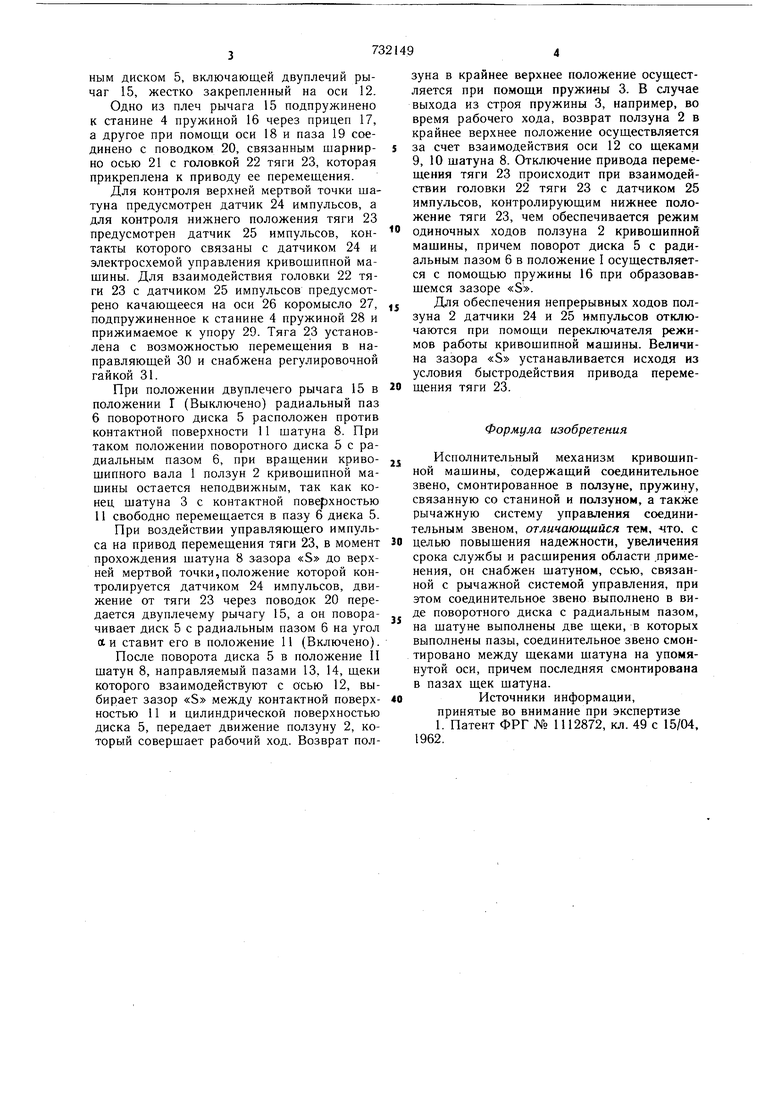
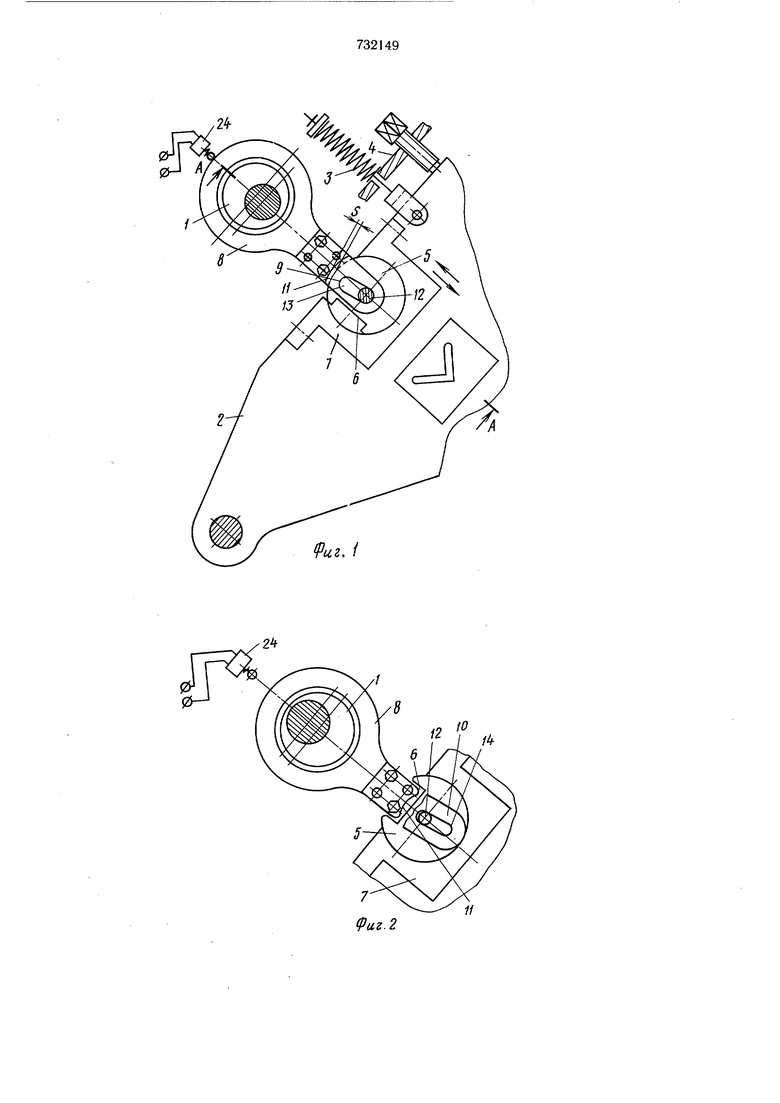
На фиг. 1 изображен исполнительный механизм кривошипной машины, ползун расположен в крайнем верхнем положении; на фиг. 2 - то же, ползун расположен в крайнем нижнем положении; на фиг. 3 - сечеJ ние А-А на фиг. I; на фиг. 4 - вид Б на фиг. 3.
Механизм включения кривошипной машины содержит кривошипный вал 1, ползун 2, подпружиненный пружиной 3 к станине 4, соединительное звено, выполненное в виде диска 5 с радиальным пазом б, установленного в ци.тиндрической расточке стакана 7, и шатуна 8 со щеками 9, 10, смонтированного на кривошипном валу 1 и снабженного контактной поверхностью 11, ответной поверхности диска 5, при этом диск
5расположен между щеками 9, 10 шатуна 8 и соединен посредством оси 12 и пазов 13, 14, выполненных по форме, соответствующей траектории движения ползуна 2. Пазы 13, 14 выполнены в щеках 9, 10. Длина пазов 13, 4 и глубина радиального паза
6больще двойной величины эксцентриситета кривошипного вала 1. Ось 12 связана с рычажной системой управления поворотКРИВОШИПНОЙ МАШИНЫ
ным диском 5, включающей двуплечий рычаг 15, жестко закрепленный на оси 12.
Одно из плеч рычага 15 подпружинено к станине 4 пружиной 16 через прицеп 17, а другое при помощи оси 18 и паза 19 соединено с поводком 20, связанным шарнирно осью 21 с головкой 22 тяги 23, которая прикреплена к приводу ее перемещения.
Для контроля верхней мертвой точки шатуна предусмотрен датчик 24 импульсов, а для контроля нижнего положения тяги 23 предусмотрен датчик 25 импульсов, контакты которого связаны с датчиком 24 и электросхемой управления кривощипной мащины. Для взаимодействия головки 22 тяги 23 с датчиком 25 импульсов предусмотрено качающееся на оси 26 коромысло 27, подпружиненное к станине 4 пружиной 28 и прижимаемое к упору 29. Тяга 23 установлена с возможностью перемещения в направляющей 30 и снабжена регулировочной гайкой 31.
При положении двуплечего рычага 15 в положении Г (Выключено) радиальный паз 6 поворотного диска 5 расположен против контактной поверхности 11 шатуна 8. При таком положении поворотного диска 5 с радиальным пазом 6, при вращении кривошипного вала 1 ползун 2 кривошипной машины остается неподвижным, так как конец шатуна 3 с контактной поверхностью 11 свободно перемещается в пазу 6 диска 5. При воздействии управляющего импульса на привод перемещения тяги 23, в момент прохождения шатуна 8 зазора «S до верхней мертвой точки,положение которой контролируется датчиком 24 импульсов, движение от тяги 23 через поводок 20 передается двуплечему рычагу 15, а он поворачивает диск 5 с радиальным пазом 6 на угол Ли ставит его в положение 11 (Включено). После поворота диска 5 в положение II щатун 8, направляемый пазами 13, 14, щеки которого взаимодействуют с осью 12, выбирает зазор «S между контактной поверхностью 11 и цилиндрической поверхностью диска 5, передает движение ползуну 2, который соверщает рабочий ход. Возврат ползуна в крайнее верхнее положение осущестляется при помощи пружийы 3. В случае выхода из строя пружины 3, например, во время рабочего хода, возврат ползуна 2 в крайнее верхнее положение осуществляется
за счет взаимодействия оси 12 со щеками 9, 10 шатуна 8. Отключение привода перемещения тяги 23 происходит при взаимодействии головки 22 тяги 23 с датчиком 25 импульсов, контролирующим нижнее положение тяги 23, чем обеспечивается режим
одиночных ходов ползуна 2 кривощипной мащины, причем поворот диска 5 с радиальным пазом 6 в положение I осуществляется с помощью пружины 16 при образовавщемся зазоре «S.
Для обеспечения непрерывных ходов ползуна 2 датчики 24 и 25 импульсов отключаются при помощи переключателя режимов работы кривошипной мащины. Величина зазора «S устанавливается исходя из условия быстродействия привода перемещения тяги 23.
Формула изобретения
Исполнительный механизм кривошипной машины, содержащий соединительное звено, смонтированное в ползуне, пружину, связанную со станиной и ползуном, а также рычажную систему управления соединительным звеном, отличающийся тем, что, с
целью повышения надежности, увеличения срока службы и расширения области .применения, он снабжен шатуном, ссью, связанной с рычажной системой управления, при этом соединительное звено выполнено в виде поворотного диска с радиальным пазом, на шатуне выполнены две шеки, в которых выполнены пазы, соединительное звено смонтировано между щеками шатуна на упомянутой оси, причем последняя смонтирована в пазах щек шатуна.
Источники информации,
принятые во внимание при экспертизе 1. Патент ФРГ № 1112872, кл. 49 с 15/04, 1962.
,24
fuz, /
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-клиновой пресс | 1978 |
|
SU816781A1 |
| Исполнительный механизм кривошипной вертикальной кузнечно-прессовой машины | 1983 |
|
SU1109320A1 |
| Радиально-ковочная машина | 1984 |
|
SU1232349A1 |
| Швейная машина | 1981 |
|
SU1234480A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| Механический пресс | 1981 |
|
SU1004149A1 |
| Кривошипно-рычажный исполнительный механизм летучих ножниц | 1983 |
|
SU1151381A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Горизонтально-ковочная машина | 1985 |
|
SU1291268A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
0
to
/4
//
