I
Изобретение относится к автоматическим устройствам для роторных экскаваторов и ленточных перегружателей, у которых ось поворота отвальной консоли с.мещена относительно оси центральной цапфы.
Известно устройство для управления отвальной консолью, содержащее сельсинные следящие системы и масщтабную кинематическую модель отвальной консоли, а также поводок с тормозом и двумя контактами, образующими радиальный паз, и контактный щтифт, закрепленный на конце мо- 10 дели консоли, которые включены в схему управления приводом поворота консоли .
Однако такое устройство имеет ограниченное применение при погрузке в железнодорожные вагоны и автосамосвалы.
Целью изобретения является повышение производительности экскаватора путем обеспечения погрузки грунта с отвальной консоли на конвейер вдоль его продольной оси.
Это достигается тем, что устройство снабжено поворотным звеном, выполненным в 20 виде параллелограмма, образованного основанием устройства, поводком, тягой и платой, на которой установлены контакты поводка.
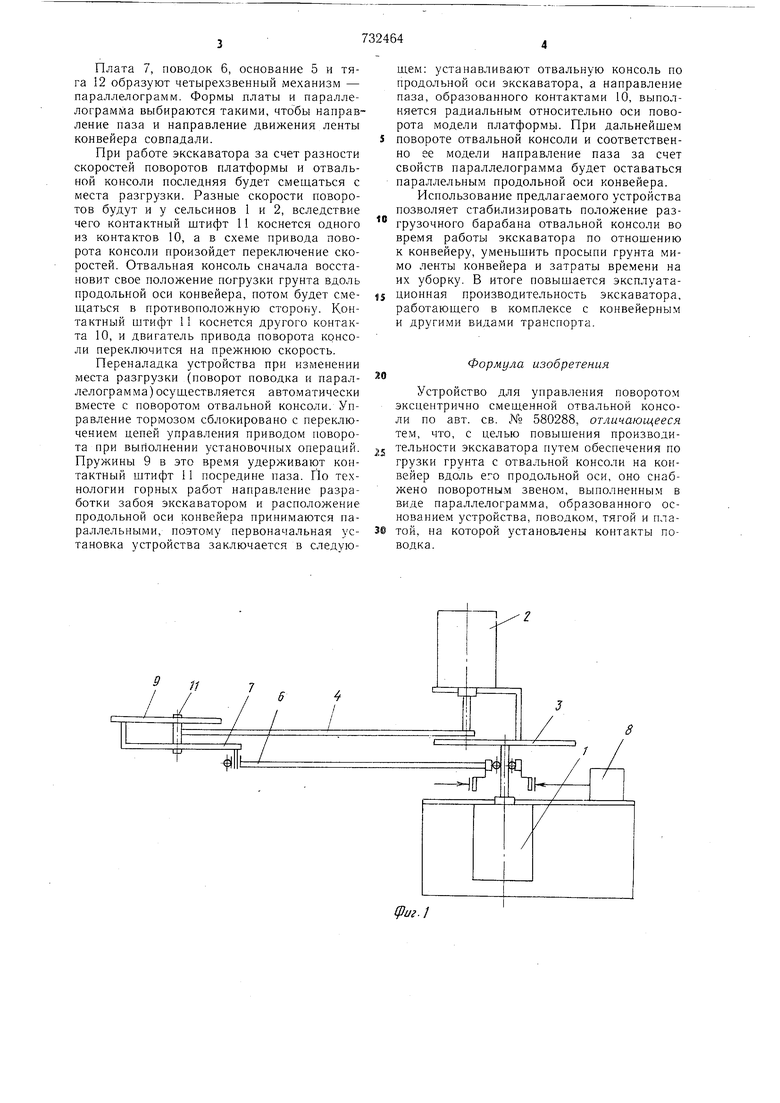
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена кинематическая схема предлагаемого устройства, вид спереди; на фиг. 2 - то же, вид сверху.
Устройство содержит сельсин-приемник 1 поворота платформы экскаватора, сельсинприемник 2 поворота отвальной консоли, модель платформы 3, модель отвальной консоли 4, основание 5, поводок 6, плату 7, электромагнитный тормоз 8, пружины 9, контакты 10, контактный штифт 11 и тягу 12.
Модель платформы 3 жестко закреплена на валу сельсина 1, а на ней со смещением осей поворота установлен сельсин 2, на вал которого посажена модель консоли 4. Поводок 6 свободно поворачивается вокруг вала сельсина 1 и может быть заторможен относительно основания 5 электромагнитным тормозом 8. К свободному концу поводка 6 щарнирно присоединена плата 7 с закрепленными на ней пружинами 9 и контактами 10, образующими паз. В паз в.ходит контактный щтифт 11, установленный на конце модели консоли 4. Контактный щтифт 11 и контакты 10 включены в с.хему управления приводом поворота отвальной консоли экскаватора (на чертеже не показана).
Плата 7, поводок 6, основание 5 и тяга 12 образуют четырехзвенный механизм - параллелограмм. Формы ллаты и параллелограмма выбираются такими, чтобы направление паза и направление движения ленты конвейера совпадали.
При работе экскаватора за счет разности скоростей поворотов платформы и отвальной консоли последняя будет смещаться с места разгрузки. Разные скорости поворотов будут и у сельсинов 1 и 2, вследствие чего контактный штифт 11 коснется одного из контактов 10, а в схеме привода поворота консоли произойдет переключение скоростей. Отвальная консоль сначала восстановит свое положение погрузки грунта вдоль продольной оси конвейера, потом будет смещаться в противоположную сторону. Контактный щтифт 11 коснется другого контакта 10, и двигатель привода поворота консоли переключится на прежнюю скорость.
Переналадка устройства при изменении места разгрузки (поворот поводка и параллелограмма) осуществляется автоматически вместе с поворотом отвальной консоли. Управление тормозом сблокировано с переключением цепей управления приводом поворота при выполнении установочных операций. Пружины 9 в это время удерживают контактный штифт 11 посредине паза. По технологии горных работ направление разработки забоя экскаватором и расположение продольной оси конвейера принимаются параллельными, поэтому первоначальная установка устройства заключается в следующем: устанавливают отвальную консоль по продольной оси экскаватора, а направление паза, образованного контактами 10, выпо.тняется радиальным относительно оси поворота модели платформы. При дальнейшем повороте отвальной консоли и соответственно ее .модели направление паза за счет свойств параллелограмма будет оставаться параллельным продольной оси конвейера.
Использование предлагаемого устройства позволяет стабилизировать положение разгрузочного барабана отвальной консоли во время работы экскаватора по отношению к конвейеру, уменьшить просыпи грунта мимо ленты конвейера и затраты времени на их уборку. В итоге повышается эксплуатационная производительность экскаватора, работающего в комплексе с конвейерным и другими видами транспорта.
Формула изобретения
Устройство для управления поворотом эксцентрично смещенной отвальной консоли по авт. св. № 580288, отличающееся тем, что, с целью повышения производительности экскаватора путем обеспечения по грузки грунта с отвальной консоли на конвейер вдоль его продольной оси, оно снабжено поворотным звеном, выполненным в виде параллелограмма, образованного основанием устройства, поводком, тягой и платой, на которой установлены контакты поводка.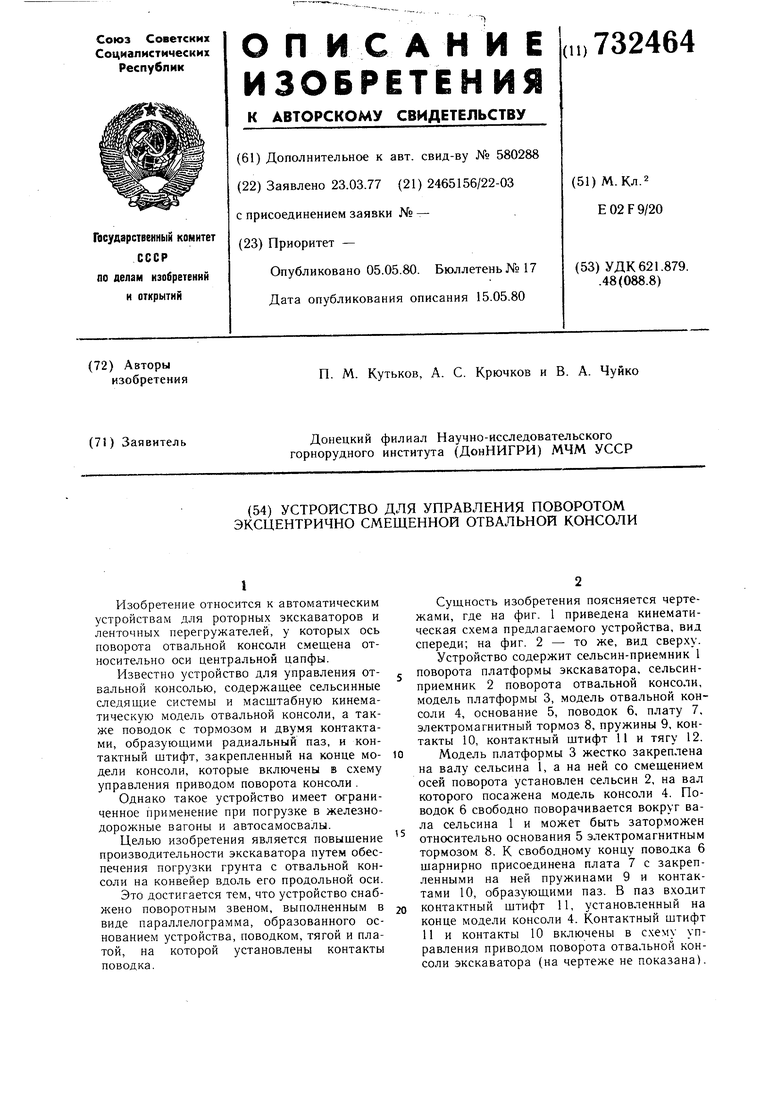
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления поворотом эксцентричного смещенной отвальной консоли | 1976 |
|
SU580288A1 |
| Отвалообразователь | 1975 |
|
SU606958A1 |
| Роторный экскаватор | 1980 |
|
SU956694A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| Верхнее строение роторного экскаватора | 1978 |
|
SU705084A2 |
| Роторный экскаватор | 1980 |
|
SU899759A1 |
| Верхнее строение роторного экскаватора | 1977 |
|
SU631611A1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| ОТВАЛ ООБРАЗОВАТЕЛЬ | 1965 |
|
SU174584A1 |
| Привод поворота отвальной стрелы экскаватора | 1976 |
|
SU723059A1 |
/./
/ /
л/
