Изобретение относится к программному управлению металлорежущими станками, конкретно к устройству систем число вого программного управления. Известен линейно-круговой интерполятор, содержащий устройства расчета экви дистанты, блок задания скорости и блок интерполяции и позволяющие осуществлят коррекцию размера режущего инструмента Известен также линейно-круговой интерполятор содержащий блок управления, первый выход которого подключен ко входу блока задания скорости, выход которо подключен к первому входу блока линейно круговой интерполяции, второй и третий йыходы блока управления подсоединены к первым входам первых коммутаторов в каждой координате, а четвертый выход ко вторым входам первых коммутаторов, третьи входы которых соединены с соответствующими первыми выходами блока линейно-кругх1вой интерполяции, второй вход которого подключен к пятому выходу блока управлеш{я Г2. Этот пнтерполятор позволяет производить в режиме круговой интерполяции синхронное яычисneime величин приращений коррекции и координат основного контура. При этом рассчитываются коды приращений по координатам, определяющие вектор/ Li а в режиме круговой интерпол5щии коды, определяющие B TOpAR и коды, определяющее вектор дР ц макс. Недостаток данного интерполятора заключается в том, что величина пр1фащений коррекции (вектор АКц макс) в процессе интерполирова шл не может быть изменена во время отработки участка основного контура, заданного кадром исходной информации. Этот недостаток ограш-гчивает функциональные возможности и область применения цифрового интерполятора. . Цель иаобретеш1Я - расшире1ше функиональных возможностей интерполятора, аключающееся в обеспечеш1и возможноси адаптивного управления точносггью
обработки псх:редством коррекции эквидистапты в произвольные моменты врMeim.
Указанная цель достмаетсл тем, что S устройство вклюме11Ы два блока сравнения, блок совпадения и по каждой координате блок переноса, первый регистр и последовательно соединенные умножитель, делитель, второй коммутатор, второй регистр; первый и второй сумматоры, .в каждой координате первый вход умножителя соединен с выходом первого коммутатора, а вььход - со в-горым входом второго коммутатора, выход первого региатрп соединен со вторым входом первого сумматора, а вход - с выходом блока перйиоса, первый вход кгггорого подключе Ji liJGCTOMy выходу блока управле1шя, а вто))ОЙ зход - к выходу второго регистра второй вход второго сумматора соединен со вторым выходо-ь/ блока линейно-круговой иито)пилягши, первые выходы коаюрого подключань (;оотв(.г,гственно к первым входам иорного и йторогю блоков сравнения, вторые входы которых подключеш 1 к седьмому и восьмому выходам блока упрашгония, а выходы - ко входам блока совподония. выход которого соединен со входом блока управле(шя, третьи входы коммутаторов подклю 1ены ко вторым входам первых коммутаторов,, вторые еко ды умножителей и делителей г.одклычуям к девятому и десятому выходам блока управления соответственно.
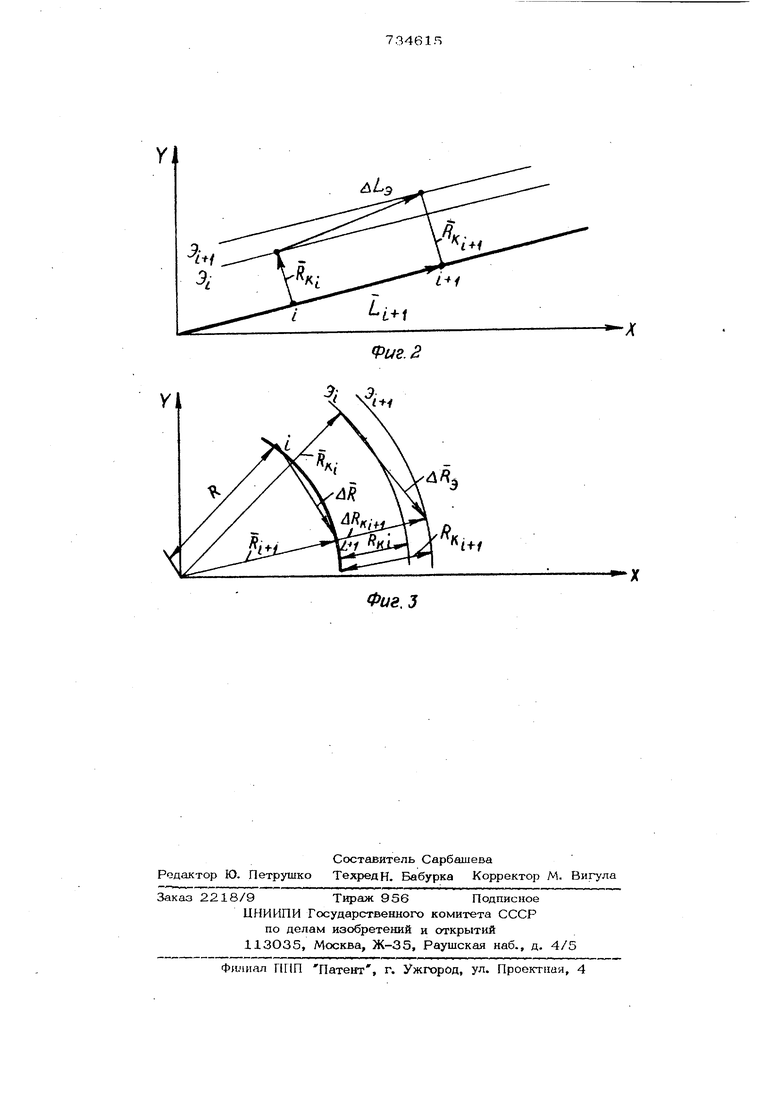
Ыа фкг. 1 представлена блок-чтхема Интерполятора па фиг. 2 н 3 - ,пиаа-рам мы работы.
Интерполятор содержит 1 пянейно-круго юй ияторпол.яцнн, блок 2 аадспош скорскгги, умиоклтели 3 и 4, лелнто.пн Бив, иораь е 7 и 8 и вторые 9 п 10 рогистры, первые 11 и 12 и вторые 13 и 14 сумматорь, блоки 15 л 10 переноса, первый 17 и 18 блоки сравнения, блок 19 соппаи нпя, блок 2О управления и первые 21 и 22 it вторые 23 и 24 комм /таторы.
Интерполятор функционирует в двух режимах: линейной и кругчшой интерполяции, управление котор)1ми прюиоьодит блок 20.
В режиме линейной мнтерпатяции на всех коммутаторах работают одни входы а в режиме круговой - друше входы.
В качестве исходных данных в интерполятор задаются: в обоих режимах работы Б блок 2 - величина контурной скорости V , в блоки 17 и 18 - соответственно координаты конечной точки пря34R154
мой ,ши дуги К- и Хц, в умножители 3 и 4 - величина радиуса коррекции эквидистанты R (( ., знак которой учитывает положен инструмента относител1: - но детали; в режиме линейной интерполяции-в блок 1 - координаты конечной точки прямой ХцИ Уц , на коммутаторы 21 и 22 - соответственно функции угла наклона прямой:
кХк
51И ct И COS oL- i .
В режиме круговой интерполяции-в блок 1 - координаты начальной точки дуги X ц , Ч ц .в делители 5 и 6 - величина радиуса окружности R.
Блок 1 вместе с блоком 2 производя интерполяцию контура детали. С выходов блока 1 на входы сумматоров 12 и 14 поступают соответственно цифровые коды AY , определяющие векторы дЬ {фиг. 2) и ди(фиг. З).
В режиме линейной интерполяции, пск;тупающие с выходов блока 2О значеiiMHdin H со&з1умножаются в умножителях 3 и 4 на величину коррекции эквидистанты , которая поступает с выхода блока 2О и может изменяться во времеШ1 по любому закону. Полученные коды, определяющие вектор Ry.{фиг. 2), постуnasoT в регистр 9 и 10.
В режиме круговой интерполяции с выходов блока 1 на умножители 3 и 4 поступают соответственно коды текущих координат Х и V , определяющие вектор - (фиг. З). После умножения на умнохедтелях 3 и 4 на величину и делШЕя на делителях 5 и 6 на величину радиуса окружности .R, поступающую с выхода блока 2, получаются коды. олределягошне вектор И,-. (фиг. 2) и поступающие в регистры 9 и 1Ос В регистрах 7 н 8 хранятся кодь определяюЕше векT JP Ki (фиг. 3 и 4). Они заносятся соответственно из регистров 9 и 1О в дополнительном коде в конце предыдущегхэ цикла вычислений по сигналу с выхода блока 2О. В сумматорах 11 и
12производится сложе ше кодов, поступющих соответгтвенно из регистров 7 и 9 и 8 и 1О. В результате образуются коды
К(. и ц .,определяю1цие разность векторов . и 13 и поступающие на соK-v i-l
ответствующие входы сумматоров 13 и 14.
Таким образом, на выходах сумматоро
13и 14, которые являются выходами
, иктерполят-ора, образуются коды, опредеi яяющие вектор и L . (Фи г. 3) или Л Т1,
1 Эл (фиг. 4) в соответствии со следующими соотношениями: л1..--Гь- -й.., ..v в блоках 17 и 18 происходит сравн ние текущих координат X и Y с координатами конечной точки Х| и Yt При ,равенствеэтих величин с выходов блоков 17 и. 18 на входы блока 19 поступают сигналы. Совпадение сигналов на входах блока 19 вызывает сигнал конца кадра с выхода блока 19 на блок 20. Экономический эффект достигается за счет оперативной коррекции экв1здистанты в любой момент обработки, например, при адаптивном управлении точностью обработки путем изменения траектории движения фрезы, при коррекции радиуса фрезы во время обработки труд нообрабатываемых материалов, при разработке устройств аварийного отвода инструмента от обрабатываемой поверхности. Формула изобретения Линейно-круговой интерполятор, соде жащий блок управления, первый выход к торого подключен ко входу блока задани скорости, выход которого подключен к первому входу блока линейно-круговой интерполяции, второй и третий выходы блока управления подсоединены к первым Входам первых коммутаторов в каждой координате, а четвертый выход - ко вторым входам первых коммутаторов, третьи входы которых соединены с соответствующими первыми выходами блок линейно-круговой интерполяции, второй 6156 вход которого подключен к пятому выходу блока управления, отличающийся тем, что, с целью расширения фушщионалыш1х возможностей интерполятора, он содержит два блока сравнения, блок совпадения и по каждой координате блок переноса, первый регистр и последовательно соединенные умножитель, делитель, второй коммутатор, вто- рой регистр, первый и второй сумматоры, в каждой координате первый вход умножителя соединен с выходом первого коммутатора, а выход - со вторым входом второго коммутатора, выход первого ре - гистра соединен со вторым входом первого сумматора, а вход - с выходом блока переноса, первый вход которого подключен к шестому выходу блока управления, а второй Вход - к выходу- второго регистра, второй вход второго сумматора соединен со вторым выходом блока линейно-круговой интерполяции, первые выходы которого подключены соответственно к первым Входам первого и второго блоков сравнения, вторь е входы которых подключены к седьмому и восьмому выходам блока управления, а выходы - ко входам блока совпадения, выход которого соединен со входом блока управления, третьи входы вторых коммутаторов подключены ко вторым входам первых коммутаторов, входы умножителей и делителей подключены к девятому и десятому выходам блока управления соответственно. Источники информации, принятые во внимание при экспертизе 1.Способы подготовки программ и интерполяторы для контурных систем числового управления станками. /И., Машиностроение, 197О, с. 13О-142. 2.Авторское свидетельство СССР № 394795, кл. G Об F 15/46, 1971.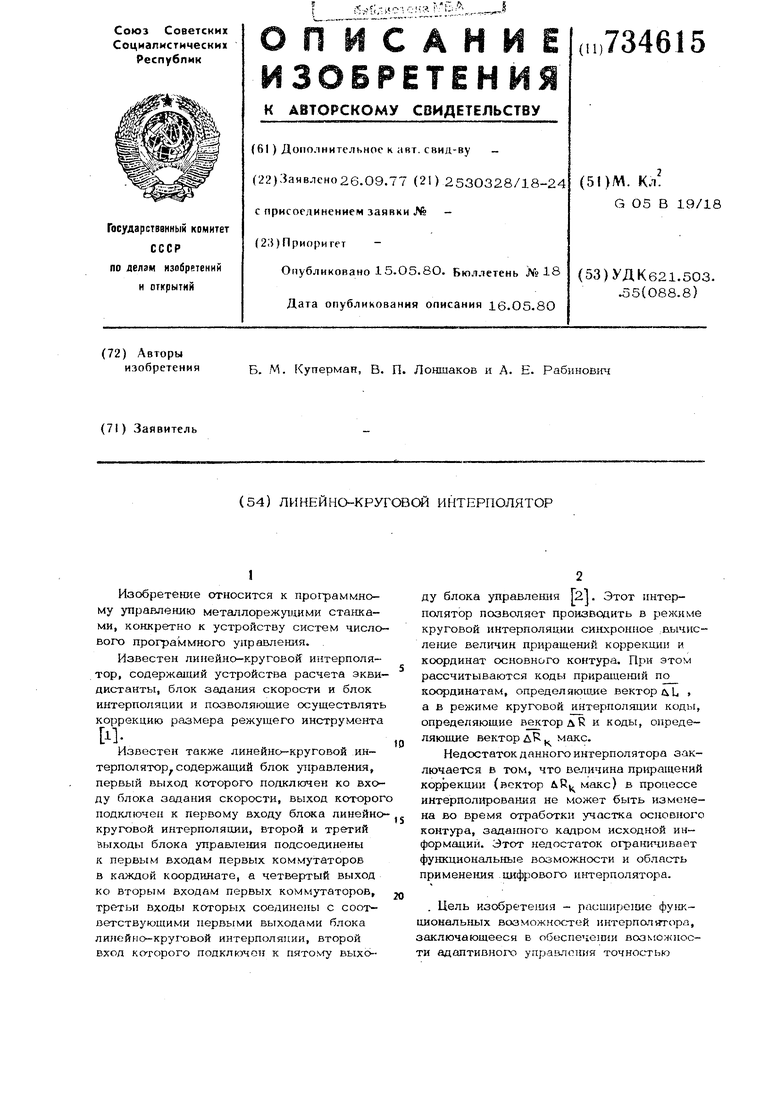
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
| Линейно-круговой интерполятор | 1978 |
|
SU896596A2 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Линейно-круговой интерполятор | 1977 |
|
SU741234A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
i
Фиё.З .
