1
Изобретение относится к автоматике и вычислительной технике, в частности,, к системам числового программного управления.j
По основному авт. св. № 734615 известен линейно-круговой интерполятор, позволяющий оперативно изменять коррекцию эквидистанты в любой момент обработки и содержащий блок JQ управления, первый выход которого подключен ко входу блока задания скорости, выход которого подключен к первому входу блока линейно-круговой интерполяции, второй и третий выходы блока управления подсоединены к первым входам первых коммутаторов в каждой координате, а четвертый выход ко вторым входам первых коммутаторов, третьи входы которых соединены с соответствующими первыми выходами блока линейно-круговой интерполяции, второй вход которого подключен к пятому выходу блокг управления, а также два блока сраЕчения, блок совпадения и t по каждой координате блок переноса, первый регистр и последовательно соединенные умножитель, делитель, второй коммутатор, второй регистр, первый и второй сумматоры, в каждой координате первый вход умножителя соединен 30
с выходом первого коммутатора, авыход - со вторым входом второго коммутатора, вход первого регистра соединен с выходом блока Переноса, первый вход которого подключен к шестому выходу блока управления, а второй вход - к выходу второго регистра, второй вход второго сумматора соединен ОС вторым выходом блока линейнокруговой интерполяции, первые выходы которого подключены соответственно к первым входам первого и второго блоков сравнения, вторые входы которых подключены к седьмому и восьмому выходам блока управления, а выходы ко входам блока совпадения, выход которого соединен со входом блока управления, входы вторых коммутаторов подключены ко вторым входам первых коммутаторов, вторые входы умножителей и делителей подключены к девятому и десятому выходам блока управления соответственно il}.
Однако область применения интер-полятора ограничена классом деталей, допускающих скругление углов излома эквидистанты.
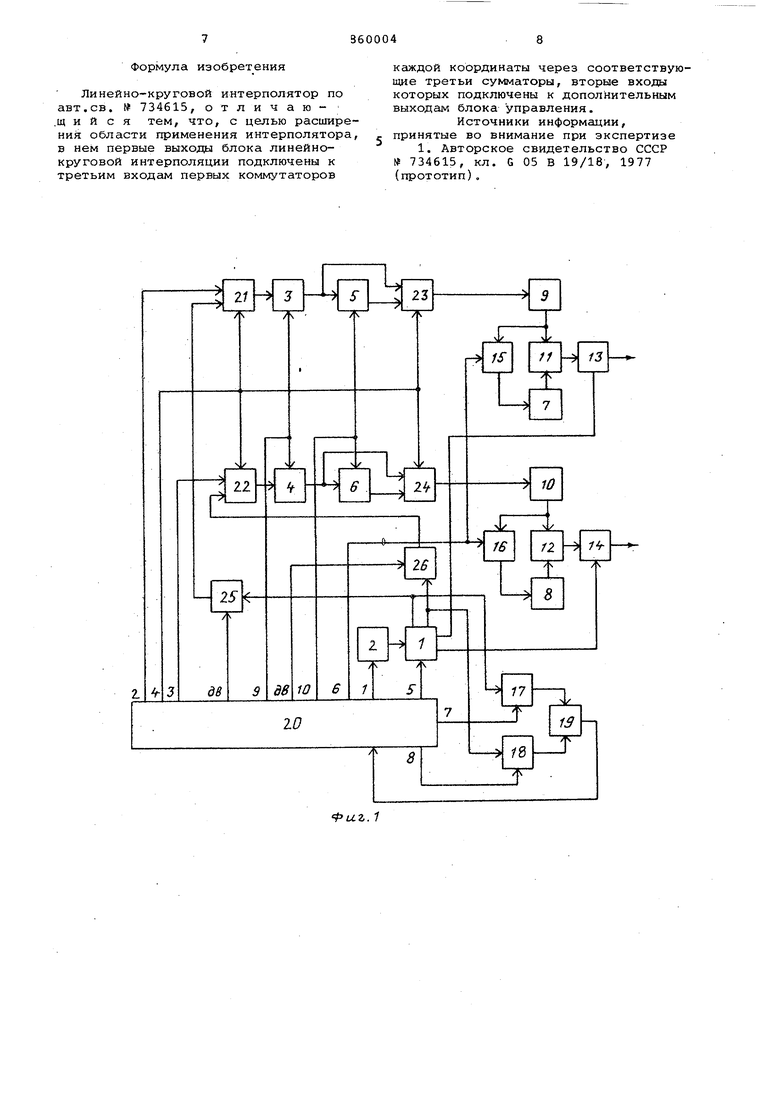
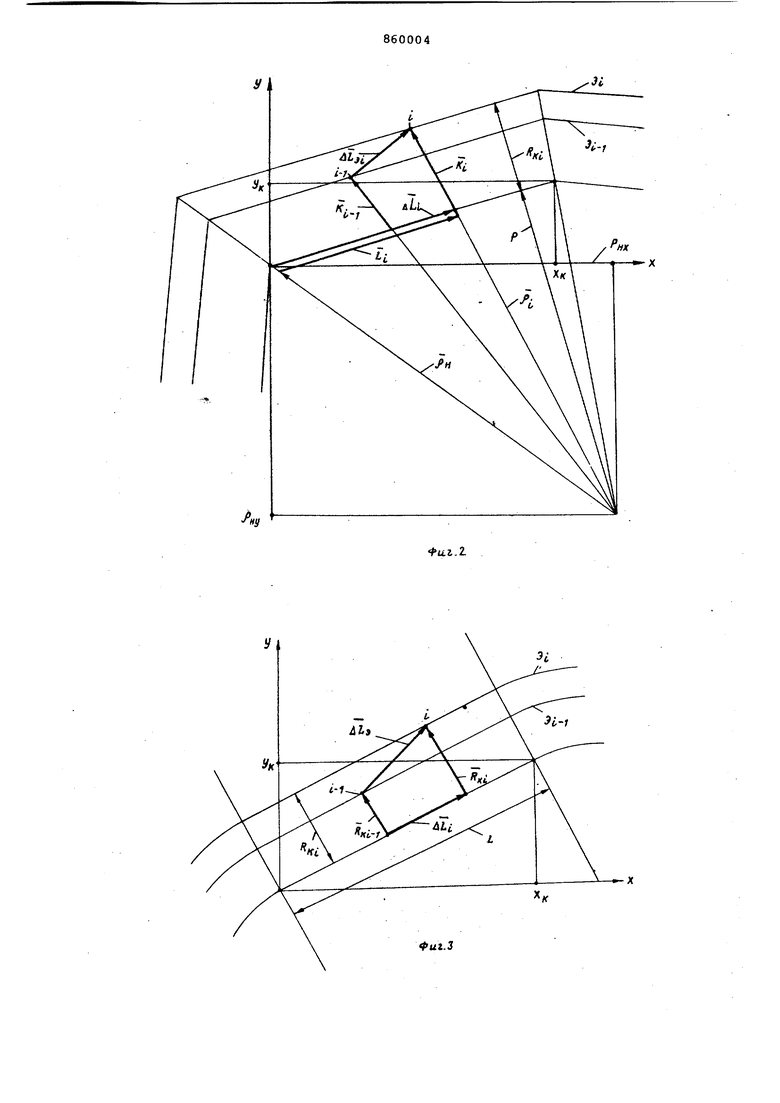
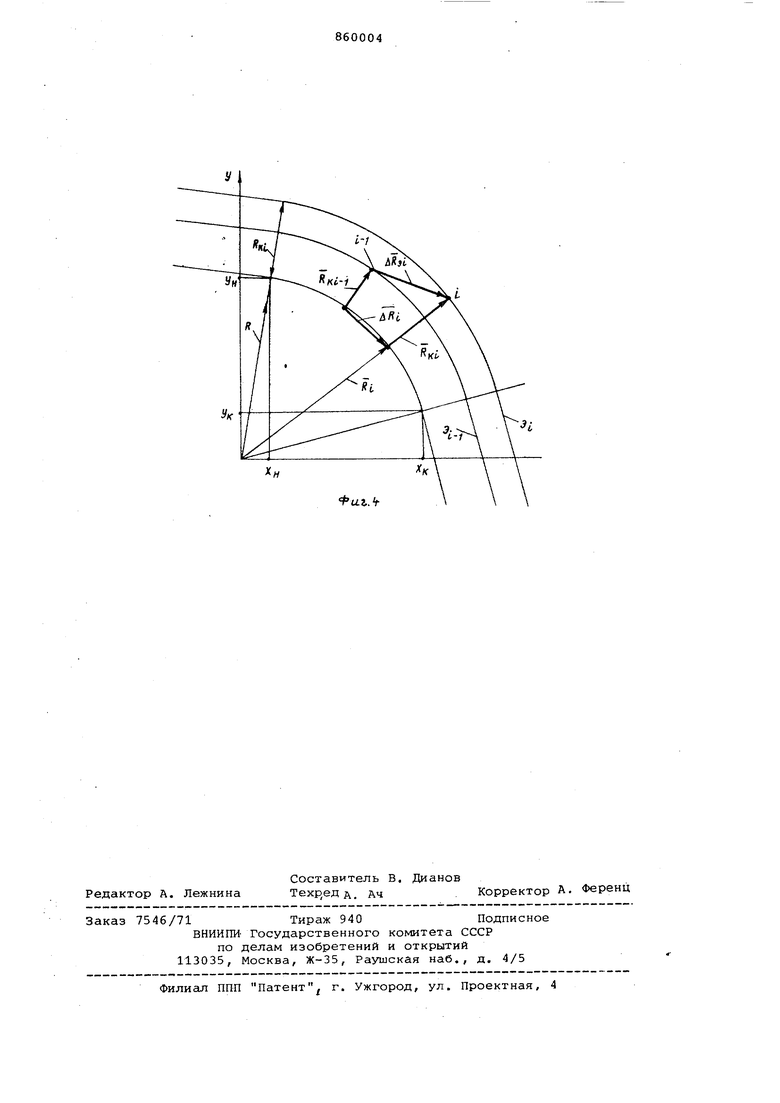
Недостаток известного интерполятора легко показать на примере детапи из труднообрабатываемого материаJia, при обработке котордй желательн получить внутренние углы с наименьш радиусом скругления, если учесть, что при обработке этого материала возни1 а т большой изгибающий момент вызывающий изгиб фрезы, обратно про порциональный третьей степени ее ра циуса. Небольшое уменьшение радиуса фрезы существенно увеличивает ее изгиб и понижает точность обработки а увеличение радиуса фрезы ограничи вается радиусом скругления внутренних углов. Здесь оптимальным является случай, когда раДиус скруглени равен радиусу фрезы, то есть когда нет скругления угла излома эквидистанты. Скругление угла излома эквидистанты требует уменьшения радиуса фрезы S.сравнении со случаем, когда нет скругления, что и ограничивает область применения интерполятора. Цель изобретения - расширение области применения интерполятора. Поставленная цель достигается те что первые выходы блока интерполяци подключены к третьим входам первых ком мутаторов каждой координаты через соответствующие третьи сумматоры, вторые входы которых подключены к дополнительным выходам блока управления. На фиг, 1 представлена блок-схем предлагаемого интерполятора; на фиг 2 - диаграмма его работы в режиме линейной интерполяции без скруг ления углов излома расчетной эквидистанты; на фиг, 3 - то же, со округлением углов излома рас четной эквидистанты; на фиг. 4 диаграмма работы в режиме круговой интерполяции. Линейно-круговой интерполятор со держит блок 1 линейно-круговой инте поляции, блок 2 задания скорости, умножители 3 и 4, делители 5 и б, первые 7 и 8 и вторые 9 и 10 регистры, первые 11 и 12 и вторые 13 и 14 сумматоры, блоки 15 и 16 переноса, первый 17 и второй 18 блоки сравнения, блок 19 совпадения, блок 20 управления, первые 21 и 22 и вторые 23 и 24 коммутаторы и третьи сумматоры 25 и 26. На фиг, 2-4 приняты следуюЕцие условные обозначения: эквидистанта к моменту начала i-ro цикла вычислений; Э - эквидистанта в конце i-ro цикла вычислений; RKI расстояние по нормали между Э и контуром в конце i-ro цикла вычислений, Y, - координаты начальной точки V / -дуги, XK, Уц. - координаты конечной точки прямой относительно начальной (на фиг, 2 и 3)и координаты конечной точки дуги (на фиг. 4); i-1 - началь ная точка (-го цикла, i - конечная точка i-ro цикла, рц - начальное значение радиуса-вектора прямой; р-, радиус-вектор прямой в конце i-ro цикла, Р - расстояние от точки пересечения биссектрис углов излома эквидистант до прямой; , RK.I.векторы коррекции к моменту начала i-ro цикла (на фиг. 3-5 соответственно) ; к; , RK; - векторы коррекции в конце I-го цикла (на фиг, 3-5 соответственно); - вектор, декодированный блоком 1 от начала первого цикла до конца 1-го цикла (на фиг.2); R( - вектор дуги в конце i-ro цикла вычислений (на фиг. 4); д ,R векторы, декодированные блоком 1 в i-oM цикле (на фиг. 2-4 соответст-венно); R - радиус дуги, ,дЯэ -векторы, декодированные интерполятором в i-oM цикле вычислений. Интерполятор функционирует в трех режимах: линейной интерполяции без скругления углов излома расчетной эквидистантыf линейной интерполяции со округлением углов излома расчетной эквидистанты; круговой интерполяции. Во всех режимах работы в качеству исходных данных в интерполятор задаются. в блок 2 - величина контурной скорости, на входы блоков 17 и 18 соответственно координаты конечной точки прямой или дуги «х, у,,;, на входы умножителей 3 и 4 -.величина радиуса коррекции эквидистанты R, которая может меняться по любому закону. Знак учитывает положение инструмента относительно детали, В режиме линейной интерполяции без скругленкя углов излома расчетной эквидистанты в качестве исходных данных в интерполятор задаются (фиг, 2): с выхода блока 20 на вход блока 1 -координаты конечной точки прямой X ц , Уц; с дополнительных выходов блока 20 на входы сумматоров 25 н 26 - соответственно величины PjiUf определяюгдие вектор pj., и с выхода блока 20 на входы делителей 5 и 6 - величина Р , В режиме линейной интерполяции без кругления углов излома расчетной квтедистанты интерполятор работает ледующим образом. С выхода блока 20 на входы комviyTaTopoB 21-24 поступает команда одключения выходов cyivtMaTopoB 25 26 через коммутаторы 21 и 22 к вхоам умножителей 3 и 4 и выходов деителей 5 и 6 через коммутаторы 23 24 ко входам регистров 9 и 10. лок 1 вместе с блоком 2 производят нтерполяцию контура детали. С выодов блока 1 на входы сумматоров 5 и 26 поступают соответственно еличины текущих координат и , пределяющие вектор , где они уммируются с величинами рцу . результате на выходах сумматоров 5 и 26 образуются соответственно еличины, определяющие вектор в ответствии с соотнсяяеиием (фиг, 2) i РН +ьi . Эти коды через коммутаторы 21 и 22 поступают на входы умно жителей 3 и 4. После умножения в умн жителях 3 и 4 на величину и деле ния в делителях 5 и б на величину Р получаем величины, определяющие вектор в соответст вии с соотношением (фиг. 2) - рц 1- L . Эти коды посту пают в регистры 9 и 10. в регистрах 7и 8 хранятся коды, определяющие ве рор . Они переносятся через блоки 15 и 16 из регистров 9 и 10 в дополнительном коде в конце предыдущего цикла по команде с выхода блока 20, 8cy мaтopax 11 и 12 выполняется сложение кодов, поступающих соотзетственно из регистров 7, 9 и 8, 10. В результате образуются величины, определяющие разность векторов и KI. ,поступающих на соответствующие входы сумматоров 13 и 14. Таким образом, на выходах суммато ров 13 и 14, которые являются выходами интерполятора, образуются величины, определяющие вектор . в соответствии с соотношением (фиг. 2 Mg/i u.L K-j.., В режиме линейной интерполяции со округлением углов излома расчетной эквидистанты Б качестве исходных дан ных в интерполятор задаются (фиг,- 3) с выхода блока 20 на вход блока 1 координаты конечной точки прямой х и у f с других выходов блока 20 на входыкоммутаторов 21 и 22 соответственно функции угла наклона прямой S i п с FT COS с . NK- в режиме линейной интерполяции со скруглением углов излома расчетной эквидистанты интерполятор работает следующим образом. С выхода блока 20 на входы кaм syтаторов 21-24 поступает команда подключения выходов блока 20 через коммутаторы 21 и 22 к входам умножителей 3 и 4 и выходов этих умножителей через коммутаторы 23 и 24 ко входам регистров 9 и 10. Значения siпоб и cosod умножаются в умножителях 3 и 4 на величину , В результате ем величины, определяющие вектор Яц. Эти величины поступают в регис ры 9 и 10 . В регистрах 7 и 8 хранят ся величины, определяющие вектор Ki-t- В cyr-iMaTOpax 11 и 12 выполняется сложение величин, поступающих соответственно из регистров 7, 9 и 8, 10. В результате образуются величины, определяющие разность векторов и Rj,-, которые поступают на соответствующие входы сум латороз 13 и 14. В результате на выходах сумматоров 13 и 14 образуются величины, определяющие вектор Л 1э1 в соответствии с соотношением (фиг, 3 u L В режиме круговой интерполяции в качестве исходных данных в интерполятор задаются (фиг. 4): с выхода блока 20 на вход блока 1 - координаты начальной точки дуги x,.y ; с другого выхода блока 20 на входы делителей 5 и 6 - величина R. В режиме круговой интерполяции интерполятор работает следующим образом. С выхода блока 20 на входы коммутаторов 21-24 поступает команда подключения выходов блока 1 через сум /таторы 25 и 26 и коммутаторы 21 и 22 к входам умножителей 3 и 4 и выходов делителей 5 и б через коммутаторы 23 и 24 ко входам регистров 9 и 10. Блок 1 вместе с блоком 2 производят интерполяцию контура детали. С выходов блока 1 через суь1маторы 25 и 26 и KOMNiyT oры 21 и 22 на входы умножителей 3 и 4 поступают соответственно величины текущих координат х,, и , определяющие вектор . После умножения на величину R и деления в делителях 5 и б на величину R в регистры 9 и 10 поступают величины , определяющие вектор в соответствии срСоотношением (Фиг. 4) RKI R -j , В регистрах 7 и 8 хранятся величины, определяюшле вектор . В cytv-nviaTopax 11 и 12 выполняется сложение величин, поступающих соответственно из регистров 7, 6-и 9, 10. В результате образуются величины, определяющие разность векторов К)и RK-I-Л Эти величины поступают на соответствующие входы сумматоров, 13 и 14. В результате на выходах cyMiviaTopoB 13 и 14 образуются величины, определяьащие вектор в соответствш- с соотношением ARg д R R Ki--fФункционировакие интерполятора в каждом режиме заканчивается при равенстве текущих координат и координат конечной точки У и , определяемом блокал-м 17 и 18, выходные сигналы каторых поступают в блок 19, где формируется сигнал конца кадра. Последний поступает на вход блока 20. Экономический эффект получают при обработке класса деталей, имеющих участки, где недопустимо уменьшение расчетного радиуса фрезы и приходится отказываться от скруглеыия углов расчетной эквидистанты (например при обработке внутренних контуров с большой кривизной у деталей из труднообрабатывае1.их материалов) , за счет оперативкой коррекции зквидистанты в любой момент обработки, например при адаптивном управлении точностью обработки путем изменен1;я траектории движения центра фрезы, при разработке устройств аварийного отвода инструмента от обрабатываемой поверхности .
Формула изобретения
Линейно-круговой интерполятор по авт.св. 734615, отличаю,щ и и с я тем, что, с целью расширений области применения интерполятора, в нем первые выходы блока линейнокруговой интерполяции подключены к третьим входам первых коммутаторов
кгокдой координаты через соответствующие третьи сумматоры, вторые входы которых подключены к дополнительным выходам блока управления.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 734615, кл. G 05 в 19/18, 1977 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1977 |
|
SU734615A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU896596A2 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Устройство для контурного программного управления станком | 1978 |
|
SU716020A1 |
| Устройство для коррекции эквидистанты в системах числового программного управления | 1985 |
|
SU1282083A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
.г. 1
3L
-X
Фиг.З
