Изобретение относится к системам управления любого назначения. может быть использовано в само настраиваюсщхся системах управления технологическими процессами, в авто матических системах оптимизации. Известен способ, заключаюсщйся в том, что управляемое изменение пр цесса контролируют за каждай заданный отрезок времени, опреяеляют управляем 1й параметр, соответствующий изменению контролируемого процесса и используют его для воздействия на сам процесс. Вычисляют дифференциальньй козффициент изменения процесса YV по величине у за определенньп отрезок времени, как разность между (k-1)-oй выборкой процессов и k-ой выборкой, а таюке величину изменения k-ou выборки. Уточненную величину Л м-1вы-числяют с использованием (k-l)-ro управляемого параметра по величине изменения Уц, Yj, и изменения Y,. за (к-1)-ую выборку. Коэффициент передачи G вычисляют по уточненной величине и (k-l)-ro управляемого параметра . Вычисляют упрежденную величину управляемого параметра Yj,. по величине дифференциального коэфф циента Y за определенное время между k-ой и (k+1)-oй ве1борками, когда на k-ую выборку (фоцесса нет управляющего воздействия. Веяичину параметра Yy, за k-ую выборкуд определяют по упрежденной велишне Y, и коэффициенту передачи t13« Недостатком этого способа является большой промежуток времени оппеде- ления вектора состояния, и как следствие малая помехоустойчивость, зависимость свойств системы от скорости изменения-параметров и снижение быстродействия. Огра1мченное количество регулируемых параметров также приводит к снижению качества регулирования.
3932461
Наиболее близко к изобретению по технической сущности и достигаемому результату в части реализации предлагаемого способа является адаптивная система управления, содержащая последовательно соединенные блок формирования функции чувствительности, испол нительный механизм, регулятор и блок с переменным коэффициентом, выход которого соединен с входом объекта управления, выходы которого соединены с входами блока формирования функции чуаствительности и через соответству101цие блоки с переменным коэффициентом ссоответствукидими входамирегулятора, вторые входы блоков с переменным коэф фициентом соединены с соответствую, щими выxoдa « блока формирования функ ции чувствительности. Система содержит также дифференциатор, выход котррого соединен с соответствующим вхо дом блока формирования функции чувствительности, а вход - с выходом объекта регулирования С2. Недостатком этой системы и способа является необходимость измерения производных до п-ой включительно, что приводит к снижению помехоустойчивости, устойчивости и надежности системы. Цель изобретения - повышение помехоустойчивости, устойчивости и надежности системы. Поставленная цель достигается тем, что система адаптивного управления, содержащая блок формирования коэффициента передачи контура коррекции параметров, последовательно соединен 1ые блок формирования функции чувствительности, вычислительное устройство, блок переменных коэффициентов, регулятор и объект управления, выходы блока переменьых коэффициентов и регулятора через блок коррекции функции чувствительности соед нены с входом блока формирования фун ции чувствительности, выход блока форьвфования коэффициента передачи контура коррекции параметров сое;динеи с входом вычислительного устройства, входы блока формирования коэффициента передачи контура коррекции параметров, вычислительного устройства и блока переменных коэффициентов соединены с выходом генератора компенсирующих сигналов, дополнитель но содержит параллельно включенные фильтры, сумматор н блок памяти, вхо фнльтрок через коммутаторы соединен.
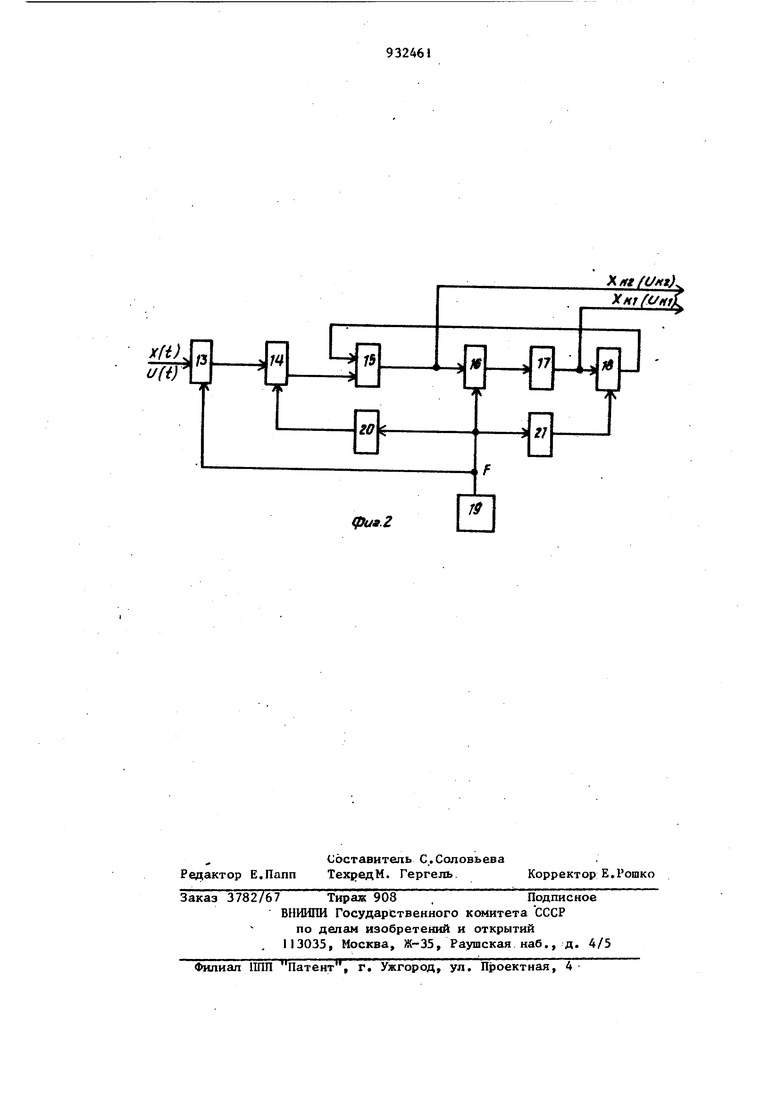
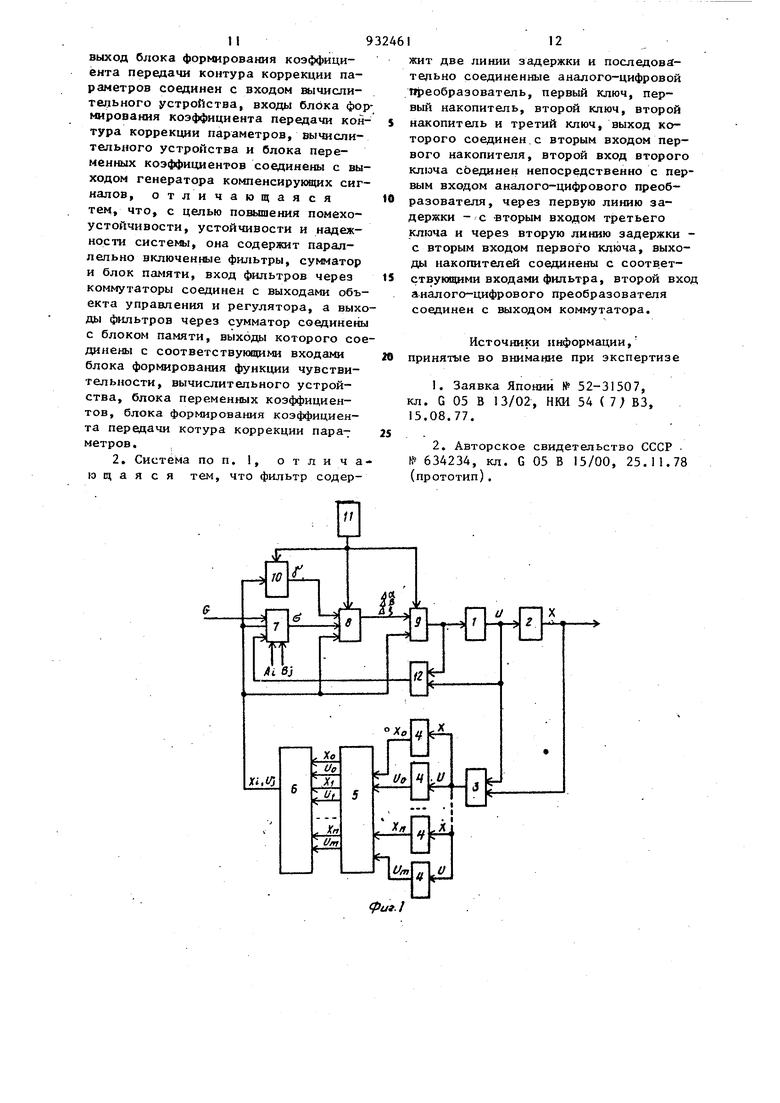
с выходами объекта упраапения и регулятора, а выходы фильтров через сумматор соединены с блоком памяти, выходы которого соединены с соответствующими входами блока формирования функции чувствительности, вычислительного устройства, блока переменных коэффициентов, блока формирования коэффициента передачи контура коррекции параметров. Другими отличиями изобретешся является то, что содержит две линии задержки и последовательно соединенные аналого-цифровой преобразоваталь, первый ключ, первый накопитель, второй ключ, второй накопитель и третий ключ, выход которого соединен с вторым входом первого накопителя, второй вход второго ключа соединен непосредственно с первым входом аналого-цифрового преобразователя, через первую линию задерхски - с вторым входом третьего ключа и через вторую линию задержки - с вторым входом первого ключа, выходы накопителей соединены с соответствующими входами фильтра, второй вход аналого-цифрового преобразователя соединен с выходом коммутатора. Пусть система описывается уравнением вида x..b. 1-iO j-O где X - выходной сигнал; и - сигнал управления) а., Ь- - параметры системы, необходимо попучить движение, соответствующее уравнению X..-X AllB;Q t (2) 5 А-У И В-(Х . iV Дня обеспечения условия необходимо управлять системой по законуw .St) (d,-A,)X Г-0 i-K - , - . л - . +(q./-i) Ъ-О Для обеспечения (3) используютс. фильтры определенного вида, по- зволяющие оценить производные без дифференцирования, Для этого берем некоторую функцию (t), умножаем левую и правую часть () Ha4(t) и интегрируем на интервале времени t,.-«-T. .Получаем Гча)( S a-x MbflW S to. 1 г -irn J , . J -о 5 Интегрируя по частям и вводя у ловие , , . . y Vobf )OAA5iVi€lO,nполучаем:J CH)V4u 5HVa:if 4i)lx(t)at Г--. iOтJ to I s4-i))u(t)d-fc. , -to °. При , b; постоянных и с учето обозначений . . (t)u(t)(v) to-«T/,gx . )xlt)(v), to+T получаем уравнение ЛИ n-1 Xf л гЧгХм()+11С1) )-Т.И)Ци (i-0ГО . являющееся алгебраическим, причем все значения Х(г), Uj(r) получены на одном такте управления, что значительно повышает быстродействи по сравнени о с разностной схемой. В дальнейшем дпя простоты индек г в выражениях опускается. Принимая 4(t) периоди1 еской с периодом Т nojjy4aeM totT )x(i)at )K wat Из (6) очевидно, что если прохо ная характеристика фильтра характеристика фильтра соответ ствует ), то Х может быть получено в момент времени t +Т на вы ходе фильтра. Условию (4а) удовлетворяет, например, функция 4(t) и Vtt)(CKSiht«jKibaKC05Ku;t )--. CKiKwHsiwlKwi+ilH -5K(Ktw)cOS( |)3. Таким образом, для получения вс :Х необходимо п фильтров, реализую щих зависимости sin Ktit и cos Ktit и сумматор, обеспечивающий вычисле ние Х. Уравнение фильтра на интервале Г-о ). Xn lv«1--3eXKiM + -vXKiCvii-)f9e2)t{v). 16 Фильтры реализуют зависимости FT (ti)eiHKU)ti x(ti)coskujt1- 0где t. - моменты времени, определяемые генератором тактовой частоты. Сумматор осуществляет вычисление (кшгх | акии;гх, Оценка вектора состояния легко реализуется как на специализированном устройстве, так и на любой вычислительной машине. Рассматриваем управление сис;темой. Пусть желаемые свойства системы описываются, как и ранее, уравнением (2). Применяем преобразование ни ем v-i/. применяем пре с модепирующей функцией с выражениями (2) и (3). Получаем . . . С.-1)Х, (,-lV ,. - S (-iVBjG«, iiQ i-O , I (-i))Xt TEa -iVx .i 1-K+1 ()ХкИ) .|,VlViar Ai)Vi )В-с.- , i-o Пусть управление ведется по старей производной и в течение интерваа 11,, tQ+Tj старшая производная стается постоянной, тогда )ai легко вычисляется из выражения (За). При адаптивном управлении закон управления записывается в виде (За при переменных параметрах: Sp.j(-i)j4-i)X+ lVc-irX; + л-Л ; I . . IV г 1й з1лС-1) BiG:; (-1) i-O jro Коэффициенты oi , / определяются ледующим образом: бГ(г)Ч-1)ХкС ))А,-ХЛ)т f.-ОI .) до(сг)-а-(у-)е(г-)х(уД-1); (7) Aibj(H-.r(r)(5Cr)U5(V-)(-i); (8) 7 (r)c(v.i)(-)| (9) ) -- f (r-i) +Д |b (Г)(У) (10) -2. Ti xMhHSo u; (loa) iroiro Выполнение (lOa) гарантирует yc.тойч 1вость систем, наилучшие свойства по приближению (Зб) и (За) на каясдом шаге обеспечиваются при . . . U;- .,г, . гг ,.1 s 4(v)i: - 1Г9 ПТ i oiroВ случае амш1итудно-иш1ульсного управлеьшя все U при j 0 обращаются в нуль и не учитываю-гся в зак не формирования уцравляювб1Х сигналов и коэффициентов в законе управ |ления. При наличии возмущений вида . FiH -s qfiir) (,,) Л-0 Vo+T f4(-)-I (t)iiv,Vtat, F (t) - известная функция возмущений, действующих Hei объект, закон управления принимает вид, иЙИj . (иКи) 4 ()(.i)X,{r)t,)(d. -A )X (И .(.)НЯ-.|с,,(Н (12) т.е. осуществляется компенсация возмущений с целью повышения качества системы. При этом (Юа) переп сывается в виде : S xJCv) чО ,0 а (36) принимает вид )XH+ sa.x,4H)+ iK+f t.|.X,(-),B,G.|,€, «f )--Г{ИСГ(К){,), (15) J - 1(- (16) Все выводы справедливы для многоканальной многосвязной системы. I8 при этом все X, и и G становятся вёк торами, а А., , а, Ь,о/, f матрицами соответству1ащей размерности. При наличии ограничения по управлению вводится коррекция в (J с целью обеспечения устойчивости систем 1 в целом. Пусть на некотором интервале достигается ограничение по и, тогда и у, пересчитывается так, чтобы ограничение достигалось в конце интервала управления, при этом получаем некоторое значение U, тогда принимаем ,р, а на следующем интервале вводим коррекцию Qf в виде cr(K-)C5(r)-(JiJ( )) U(ги), (17) и в (7), (8) подставляем 0 . Если в течение всего интервала и находится на ограничении, то . Диалогично вводятся ограничения по любой производной от управления. На фиг. 1 представлена блок-схема CHCTeNbJ адаптивного управления f на фиг. 2 - функциональная схема фильтра. Система адаптивного упранпения содержит регулятор 1 и объект 2 управпения, выходы которых через коммутатор 3 подключены к соответству-; кщим входам параллельно включенных фильтров 4. Вь1коды 4 1льтров соединешл с входами сумматора 5. Выходы су атора 5 через блок 6 памяти соединены с соответствующими входами блока 7 формирования функции чувствитепьнрсти, вычислительного устройства 8, блока 9 первмен{ых коэффициентов и блока 10 формирования ко;Эффициёнта передачи контура коррек-ции параметров. Выходы блока 10 фор шрова1шя коэф циента передачи контура коррекции параметров и блока 7 фор1Ф1рования функции чувствительности подключены к входам вычислительjного устройства 8, Выход генератора 1I компвнсируюо к возмущений подключен к соответствующим входам блока 10 фор О1рования коэффициента передачи контура коррекции параметров, вычислительного устройства 8 и блока 9 переменных коэф циентов. Вычислительное устройство 8, блок 9 переменных коэффициентов, регулятор 1 и объект 2 управления соединены последовательно. Входы блока 12 коррекции функ1ши чувствительности подключены к выходам регулятора 1 и объекта 2 управления, а выход соединен р входом блока 7 формирования фунюцш чувствительности. Фильтр 4 содержит аналого-цифровой преобразователь 13 на вход которого поступают сигналы с коммутатора, а выход подключен через ключ 14 к входу первого накопителя 15t Выход накопителя 15 через ключ 16 соединен с входом второго накопителя 17 выход которого через ключ 18 связан с входом первого яа копителя 15. Фильтр 4 содерлмт также генератор 19 тактовой частоты, выход KOTqporo подключен к соответствующим входам аналого-ци фового преобразователя 13, ключа 16, через первую линию 20 задержки к входу ключа 14 и через вторую линию 21 задержки к входу ключа 18. Вьшада накопителей 15 и 1.7 подключены к соответствующим вхбдам сумматора 5. Адаптивная/система работает след пощим образом. Задаящее воздействие G подается Иа вход блока 7 формйровадая фушощи чувствительностй, формирующего оценку отклонения динамических свойств канала от заданных по полученньт зна чениям составляющих вектора состояния канала, поступающих с вь(ща бло ка 6 памяти. Причем определение {-ей составляющей вектора состояния на заданием :1фомвжутке времени осуществляется yMHcnceraieM к 1ходиого сигнала объекта 2 управления и регулятора 1 на i-ую производную некотоp rfi функции времени (t), образующейся в ноль вместе со своими производ{« 1ми до (пО-ой включительно (п - порядок дифференциального уравнения, описывающего поведение канала) на концах промежутка и интегрированием прсшзвеяения на этом tfpf ieжутке времени. Умножение и интегрирование реализуется с помощью параллельно включеншлх фильтров 4, перехо ные характеристики которых соответствуют функции времени P(t) и йе про изводным ) до (п-1) включительно, на соответствующие входы которых через коммутатор 3 поступают сигналы с регулятора 1 и объекта 2 управления. Коммутатор 3 необходим в том случае, когда осуществляется фнльтра 15ИЯ в ц фовой форме. При этом он позволяет осуществлять аналогоцифровое преобразование U(t) и X(t) с пометдью одного аналого-цифрового преобразователя. Сумматор 5 осуществляет формирование составлявдих вектора состояния ц .выходные сигналы сумматора 5, соответству1эс(ие составляю1ф1М вектрра состояния (4б), запоминаются в блоке 6 памяти. Оценка отклонения динамических свойств канала от заданных описывается зависимостью (ба.), формируется в виде линейной комбинации составляющих вектора состояния с параметрами комбинации, равшаьФ коэффициентам дифференциального уравнения , В, описывающего эталонные дина в1ческие системы - зависимость (2). Блок 10 формирования коэффициента передачи контура коррекции параметров реализует зависимость 713), обеспечивая устойчивость Вычислит ел ьиов устройство 8 в еоответствии с соотношенижф) (7), 48), (Г5) определяет приращение коэффициентов oi, ,j , а блок 9 переменным коэффициентов определя т новые значения в, Pj, . (завнсимости (9), (10), (16) и вичиспяет сигнал управления, определяемый тлражени&1 (4, по Которому регулятор I формирует управляющее воздействие Генератор 11 компенсирукяцих бозмущений формирует сигналы, определя«мые зависимостью П. Блок 12 коррекции функции чувствительности обеспечивает устойчивость системы при наличии ограничения по управлеtmn и воз1-«ущений, действующих на реьгулятор 1 и описывается завнсимостыо ( 7}, I Предлагаемую систему воэможно реализовать в микропроцессорной технике и. использовать в качестве локальных регуляторов в АСУТП. Формула изобретения 1. Система адаптивного управления, содержащая блок формирования коэффициента передачи контура коррекции параметров, последовательно соединенные блок формирования функции чувствительности, вычислительнов устройство, блок переменных коэффициентов, регулятор и объект управления, шаходы блока переменных коэффициентов и регулятора через блок коррёкщ1и функции чувствительности соединены с входом блока формирования- функции чуествительности.
119
выход блока форь«рования коэффициента передачи контура коррекции параметров соединен с входом вычислительного устройства, входы блока формирования коэффициента передачи контура коррекции параметров, вычислительного устройства и блока переменных коэффициентов соединены с выходом генератора компенсирукицих сигналов, отличающаяся тем, что, с целью повышения помехоустойчивости, устойчивости и надежности системы, она содержит параллельно включенные фильтры, сумматор и блок памяти, вход фильтров через коммутаторы соединен с выходами объекта управления и регулятора, а выходы фильтров через сумматор соединены с блоком памяти, выходы которого соединены с соответствующими входами блока формирования функции чувствительности, вычислительного устройства, блока переменных коэффициентов, блока формирования коэффициента передачи котура коррекции пара-; метров.
2. Система по п. 1, отличаю D; а я с я тем, что фильтр содер12
жит две линии задержки и последовательно соединенные аналого-цифровой преобразователь, первый ключ, первый накопитель, второй ключ, второй накопитель и третий ключ, выход которого соединен с вторым входом первого накопителя, второй вход второго кл1зча соединен непосредственно с первым входом аналого-цифрового преобразователя, через первую линию задержки - с -вторым входом третьего ключа и через вторую линию задержки с вторым входом первого ключа, выходы накопителей соединены с соответствукицими входами фильтра, второй вхо а-налого-цифрового преобразователя соединен с выходом коммутатора.
Источники информации, принятые во внимание при экспертизе
1.Заявка Японии № 52-31507, кл. G 05 В 13/02, НКИ 54 ( 7; ВЗ, 15.08.77.
2.Авторское свидетельство СССР № 634234, кл. G 05 В 15/00, 25.11.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного управления | 1982 |
|
SU1105863A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| Адаптивная система управления | 1981 |
|
SU940131A1 |
| Устройство стабилизации системы автоматического регулирования для объектов с самовыравниванием | 1978 |
|
SU711544A2 |
| Устройство для считывания и обработки изображений объектов /его варианты/ | 1984 |
|
SU1280409A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |