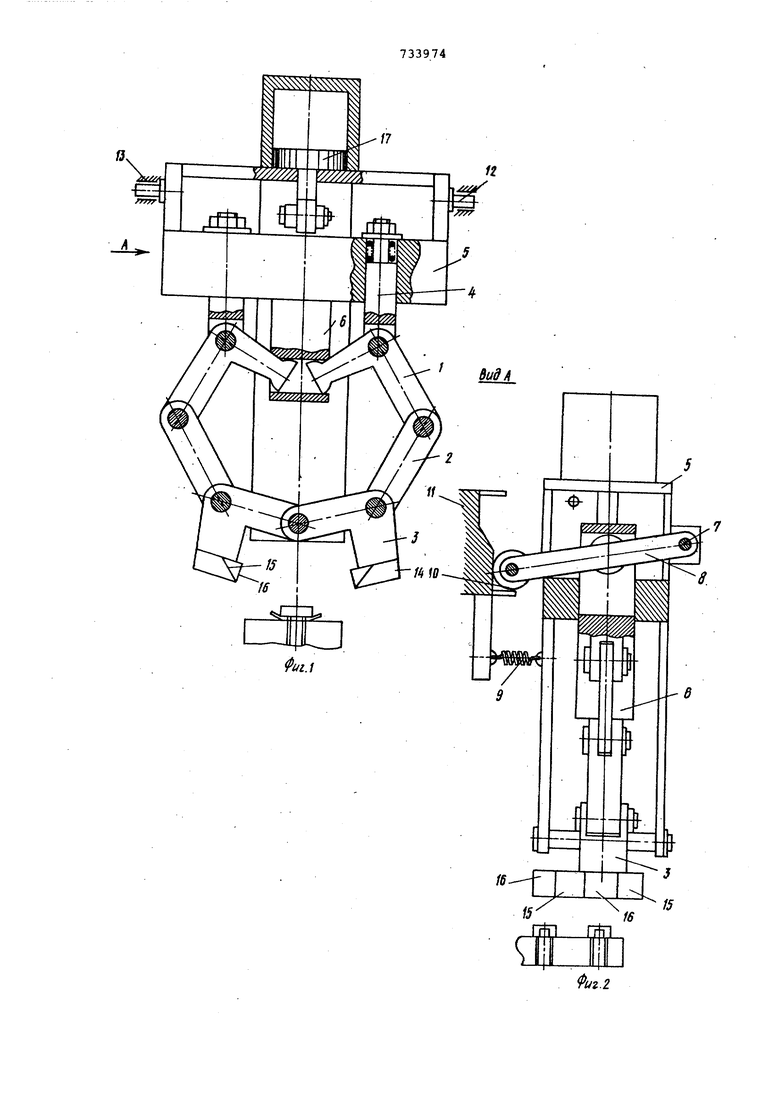
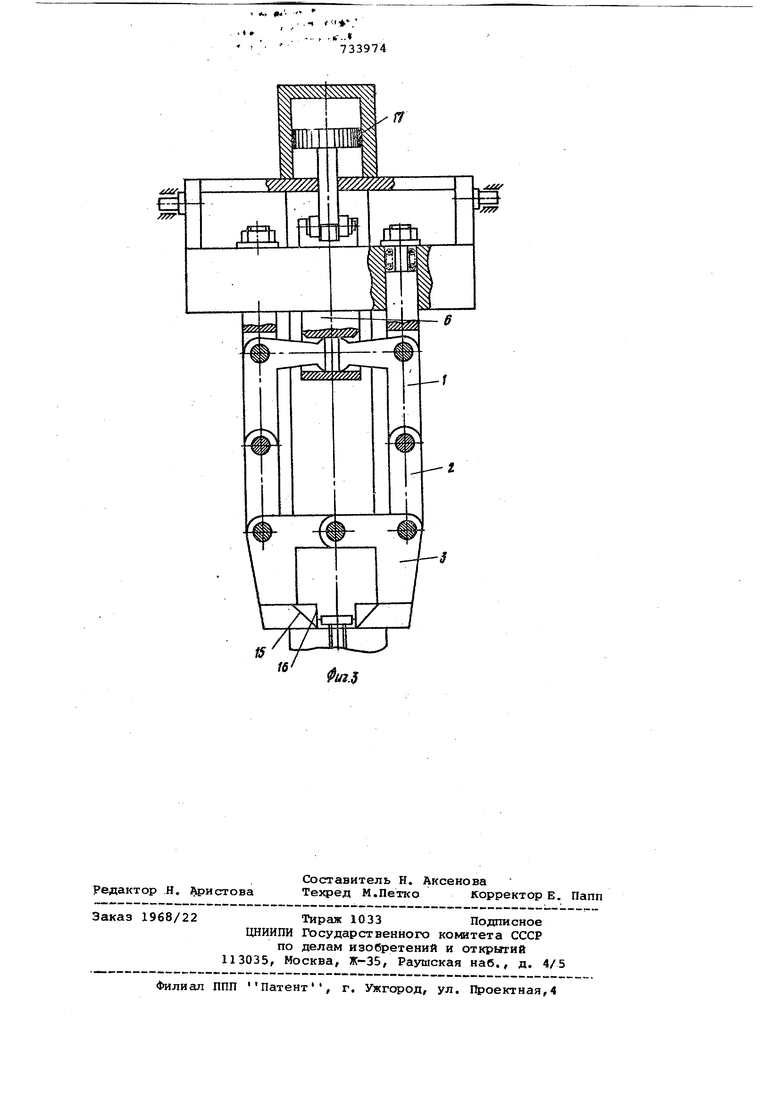
Изобретение относится к областк машиностроения и приборостроения, в частности к механизированной сборке различных узлов и деталей. Известно устройство для дистанционной загибки стопорных шайб, содержащее корпус с головкой, размещен ные в нем винтовой привод и рабочий орган, выполйенный в виде рычага с отверстием, установленного на оси, одно плечо которого имеет отогнутый конец для загибки шайбы 1. Данное устройство используется для загибки только одного усика стопорной шайбы и использование его дл загибки усиков, например, замочных пластин, имеющих четыре и более усиков, непроизводительно ч не обеспечивает качественной подгибки. Наиболее близким техническим решением к изобретению является устрой ство для загибки усиков замочных пластин, содержащее корпус, пневмоцилиндр с плунжером, захват с губка ми, выполненный в виде симметрично расположенных рычагов, шарнирно соединенных между собой и с корпусо и взаимодействующих свободными конц ми с плунжером, и копир 12. Недостатком данного устройства является то, что в процессе работы из-за малого начального угла между усиками и плоскостью прилегания пластины и выполнения операции за один прием часто происходит смятие усиков, а следовательно, и ненадежное сто порение болтов. Целью изобретения является повышение ка гества загибки и производительности. Указанная цель достигается тем, что устройство для загибки усиков за(лочных пластин снабжено дополнительным рычагом, ;шарнирно укрепленным одним концом в корпусе, взаимодействующим свободным концом с копиром, а средней частью с плунжером, и опорами, на которых жестко закреплен копир и шарнирно - корпус, и оси которых параллельны оси шарнира дополнительного рычага, при этом шарниры, соединяющие.рычаги с корпусом, подпружинены в направлении продольной оси устройства, а губки захвата выполнены ,попарно и под разными углами Е)асположенными рабочими площадками. На фиг. 1 показано устройство для загибки усиков замочных пластин;
на фиг. 2 - вид А на фиг.1; на фиг. 3 - то же устройство в промежуточном положении, при котором губки захвата сведены максимально.
Захват выполнен в виде симметрично расположенных рычагов 1, 2 и 3 (см.фиг.1), которые шарнирно соединены между собой. Рычаги 1 смонтированы на подпружиненных опорах 4, которые расположены.в корпусе 5. Концы рычагов 1 размещены в нижнем пазу плунжера 6 (см.фиг.3). В корпусе 5 на оси 7 (см.фиг.2) смонтирован рычаг 8, который пружиной 9 через роли 10 прижат к плоскости копира 11. Этим самым определяется положение завата относительно усиков замочных пластин.
Корпус 5 . устройства установлен на осях 12 в опорах 13, на которых также жестко закреплен копир, губки
14захвата выполнены с рабочими площадками -15 и 16.
Устройство работает следующим образом.
Поршень 17 пневмоцилиндра находится в верхнем положении и площадки
15губок 14 расположены в зоне усиков замочных пластин. При опускании поршня 17 пневмоцилиндра вниз на половину хода плунжер б поворачивает рычаги 1,2,3, и губки 14 площадками 15 производят предварительную подгибку усиков. При этом возможные несимметричные расположения усиков относительно оси болта компенсируются подпружиненными опорами (см.фиг.1). При дальнейшем ходе поршня рычаги 1 и 2, проходя нижнюю мертвую точку, занимают положение симметрично исходному При этом рычаги 3 занимают первоначальное положение.
Во время движения плунжера б вниз рычаг 8 (см.фиг.2), находясь в верхнем фиксир ованном положении, сохраняет относительно оси 7 поворота положение захватов в процессе подгибки При продолжений перемещения плунжера б вниз, когда губки несколько отойдут от усиков пластины, площадкой плунжера б рычаг 8 опускается и, взаимодействуя с копиром 11,
поворачивает захват во второе фиксированное положение. При этом рабочие площадки 16 губок 14 устанавливаются в зоне расположения усиков пластины.
При обратном движении поршня губки захвата работают в такой же последовательности, осуществляя окончательную загибку усиков, а в конце хода плунжер б отводит отклоняющий рычаг 8, а следовательно, и захват в первоначальное положение. После этого цикл повторяется.
Формула изобретения
1.Устройство для загибки усиков замочных пластин, содержащее корпус, пневмоцилиндр с плунжером, захват
с губками, выполненный в виде симметрично расположенных рычагов, шарнирно соединенных между собой и с корпусом и взаимодействующих свободными концами с плунжером,и копир,о т л ичающееся тем, что, с целью повышения качества загибки и производительности, оно снабжено дополнительным рычагом, шарнирно укрепленным одним концом в корпусе, взаимодействующим свободным концом с копиром, а средней частью с плунжером и опорами, на которых жестко закреплен копир и шарнирно - корпус, и оси которых параллельны оси шарнира дополнительного рычага.
2.Устройство по П.1, отличающееся тем, что шарниры, соединяющие рычаги с корпусом, подпружинены в направлении продольной оси устройства.
3.Устройство по пп.1й2, о т л ич а ю щ е -е с я тем, что губки захвата выполнены попарно и под разными углами расположенными рабочими площадками,
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 579124, кл. В 23 Р 19/08, 1976.
2.Авторское свидетельство СССР 1 366054, кл. В 23 Р 7/04, 1971 (прототип).
. .1 I.
...., ...
733974
.fOf
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загибки усов стопорных пластин | 1982 |
|
SU1016132A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ КАРДАННЫХ ВАЛОВвс?^со;озн^.ПАШи1и-Г..л;';Г'''Б^^БЛИО: ^.•'-' | 1973 |
|
SU366054A1 |
| Устройство для загибки пластин | 1988 |
|
SU1579763A1 |
| ТЕНЗОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ ДЕФОРМАЦИЙ ОБРАЗЦА | 1991 |
|
RU2010151C1 |
| Автомат для изготовления деталей из проволоки | 1985 |
|
SU1392733A1 |
| Автомат для сборки коробок | 1990 |
|
SU1735047A1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖКИ ПЕРЕДКА БОТИНКА НА КОЛОДКУ | 1971 |
|
SU322872A1 |
| ПОСЕВНОЙ КОМБИНИРОВАННЫЙ АГРЕГАТ | 1997 |
|
RU2126199C1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |