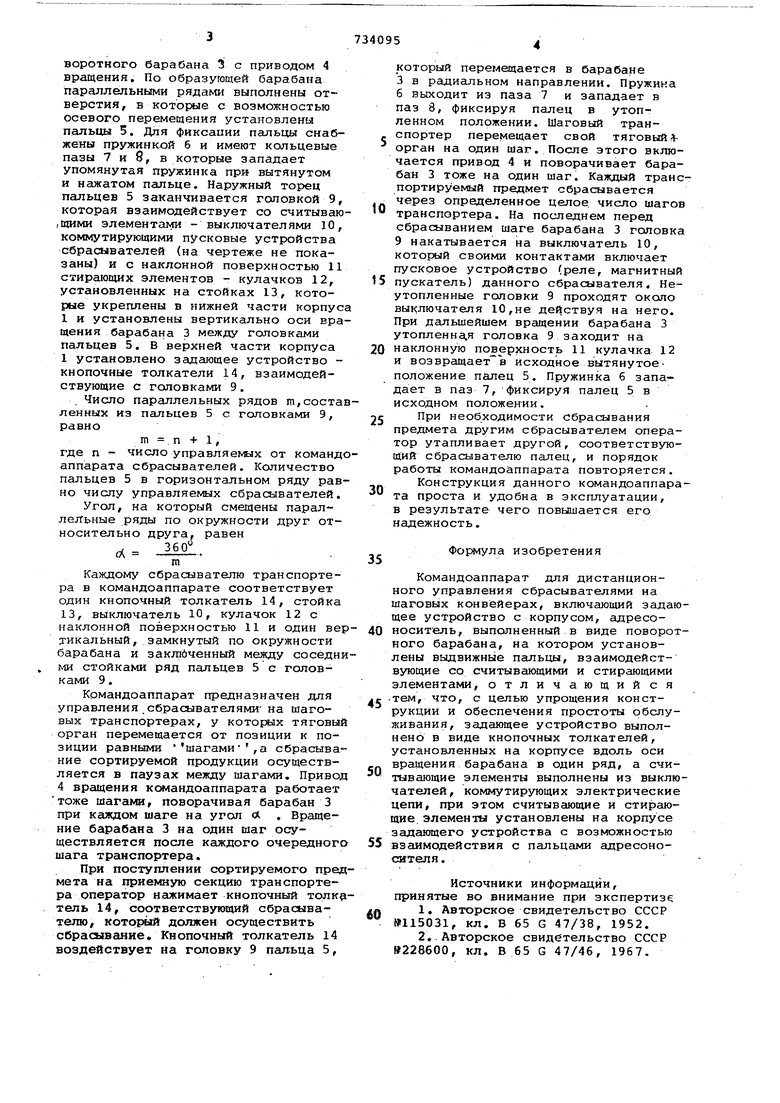
воротного барабана 3 с приводом 4 вращения. По образующей барабана параллельными рядами выполнены отверстия, в которые с возможностью осевого перемещения установлены пальцы . Для фиксации пальцы снабжены пружинкой 6 и имеют кольцевые пазы 7 и 8, в которые западает упомянутая пружинка прн вытянутом и нажатом пальце. Наружный торец пальцев 5 заканчивается головкой 9, которая взаимодействует со считываю,щими элементами - выключателями 10, коммутирующими пусковые устройства сбрасывателей (на чертеже не показаны) и с наклонной поверхностью 11 стирающих элементов - кулачков 12, установленных на стойках 13, которые укреплены в нижней части корпуса 1 и установлены вертикально оси вращения барабана 3 между головками пальцев 5. В верхней части корпуса 1 установлено задающее устройство кнопочные толкатели 14, взаимодействующие с головками 9.
Число параллельных рядов т,составленных из пальцев 5 с головками 9, равно
m п + 1,
где п - число управляег ых от командоаппарата сбрасывателей. Количество пальцев 5 в горизонтальном ряду равно числу управляемых сбрасывателей.
Угол, на который смещены параллельные ряды по окружности друг относительно друга, равен ЗбО
(А m
Каждому сбрасывателю транспортера в командоаппарате соответствует один кнопочный толкатель 14, стойка 13, выключатель Ю, кулачок 12 с наклонной поверхностью 11 и один вертикальный, замкнутый по окружности барабана и закл1йченный между соседними стойками ряд пальцев 5 с головками 9.
Командоаппарат предназначен для управления сбрасывателями на шаговых транспортерах, у которых тяговый орган перемещается от позиции к позиции равными шагами,а сбрасывание сортируемой продукции осуществляется в паузах между шагами. Привод 4 вращения командоаппарата работает тоже шагами, поворачивая барабан 3 при каждом шаге на угол л . Вращение барабана 3 на один шаг осуществляется после каждого очередного шага транспортера.
При поступлении сортируемого предмета на приемную секцию транспортера оператор нажимает кнопочный 14, соответствующий сбрасывателю, который должен осуществить сбрасывание. Кнопочный толкатель 14 воздействует на головку 9 пальца 5,
который перемещается в барабане 3 в радиальном направлении. Пружина б выходит из паза 7 и западает в паз 8, фиксируя палец в утопленном положении. Шаговый тран, спортер перемещает свой тяговый ;tорган на один шаг. После этого включается привод 4 и поворачивает барабан 3 тоже на один шаг. Каждый транспортируемый предмет сбрасывается через определенное целое, число шагов транспортера. На последнем перед сбрасыванием шаге барабана 3 головка 9 накатывается на выключатель 10, который своими контактами включает пусковое устройство (реле, магнитный
5 пускатель) данного сбрасывателя. Неутопленные головки 9 проходят около выключателя 10,не действуя на него. При дальшейшем вращении барабана 3 утопленная головка 9 заходит на
0 наклонную поверхность 11 кулачка 12 и возвращает в исходное вытянутое положение палец 5. Пружинка б западает в паз 7, фиксируя палец 5 в исходном положении.
5 При необходимости сбрасывания
предмета другим сбрасывателем оператор утапливает другой, соответствующий сбрасывателю палец, и порядок работы командоаппарата повторяется.
Конструкция данного командоаппарата проста и удобна в эксплуатации, в результате чего повышается его надежность.
Формула изобретения
Командоаппарат для дистанционного управления сбрасывателями на шаговых конвейерах, включающий задающее устройство с корпусом, адресо0 носитель, выполненный в виде поворотного барабана, на котором установлены выдвижные пальцы, взаимодействующие со считывающими и стирающими элементами, отличающийся
с -тем, что, с целью упрощения конструкции и обеспечения простоты обслуживания, задающее устройство выполнено в виде кнопочных толкателей, установленных на корпусе вдоль оси вращения барабана в один ряд, а считывающие элементы выполнены из выключателей, коммутирующих электрические цепи, при этом считывающие и стирающие, элементы установлены на корпусе задающего устройства с возможностью
5 взаимодействия с пальцами адресоносителя..
Источники информации, принятые во внимание при экспертизе я1. Авторское свидетельство СССР
№115031, кл, В 65 G 47/38, 1952.
2. Авторское свидетельство СССР №228600, кл. В 65 G 47/46, 1967.
13
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распределения перемещаемых транспортером штучных грузов по отдельным местам | 1958 |
|
SU117552A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| МАШИНА ДЛЯ ВКЛАДЫВАНИЯ РЕЗИНОВЫХ КОЛЕЦ В КРЫШКИ ДЛЯ СТЕКЛЯННЫХ БАНОК | 1958 |
|
SU119509A1 |
| Устройство поворота многошпиндельного барабана токарного автомата | 1979 |
|
SU856661A1 |
| Прошивная сапожная машина | 1933 |
|
SU40694A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Устройство для установки объектаВ зАдАННОМ пОлОжЕНии | 1979 |
|
SU822160A1 |
| МАЛОГАБАРИТНАЯ ХЛОПКОПРЯДИЛЬНАЯ МАШИНА ДЛЯ ВЫРАБОТКИ ПРЯЖИ ИЗ ЛЕНТЫ | 1952 |
|
SU98484A1 |
| ТЕРМОРАДИАЦИОННАЯ СУШИЛКАВСЕСОЮЗНАЯ | 1970 |
|
SU271375A1 |
| СПОСОБ СОРТИРОВКИ КУСКОВОГО МИНЕРАЛЬНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2103075C1 |
А-А
