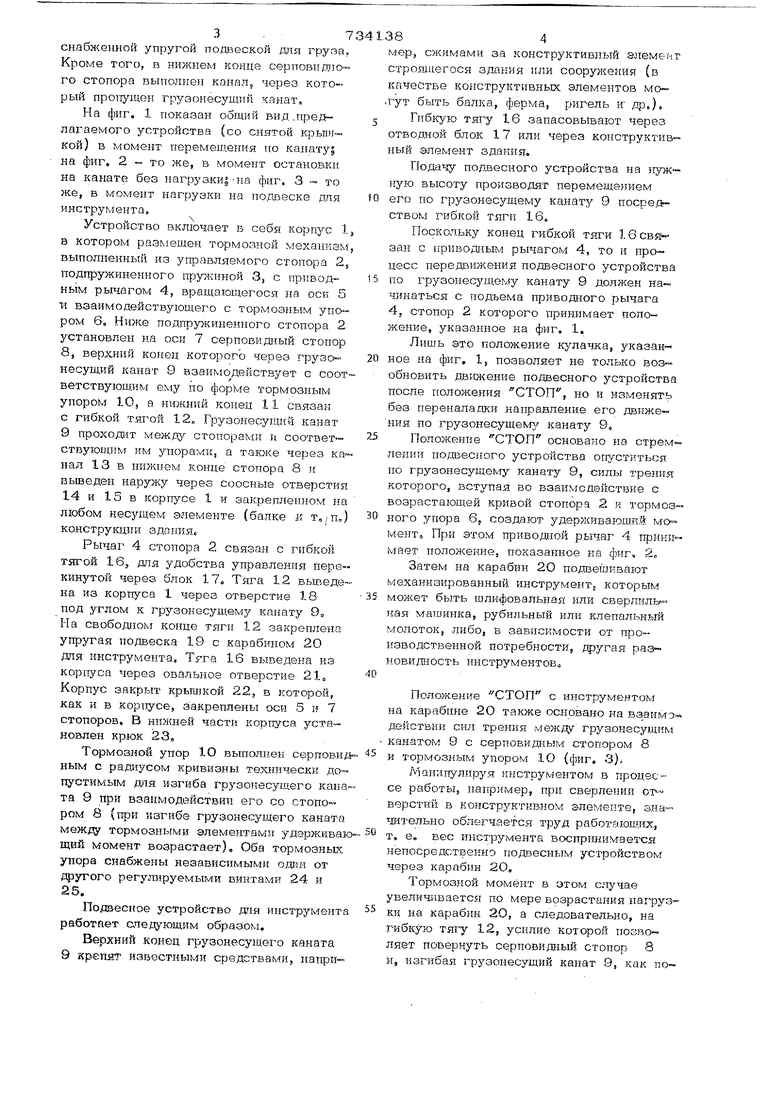
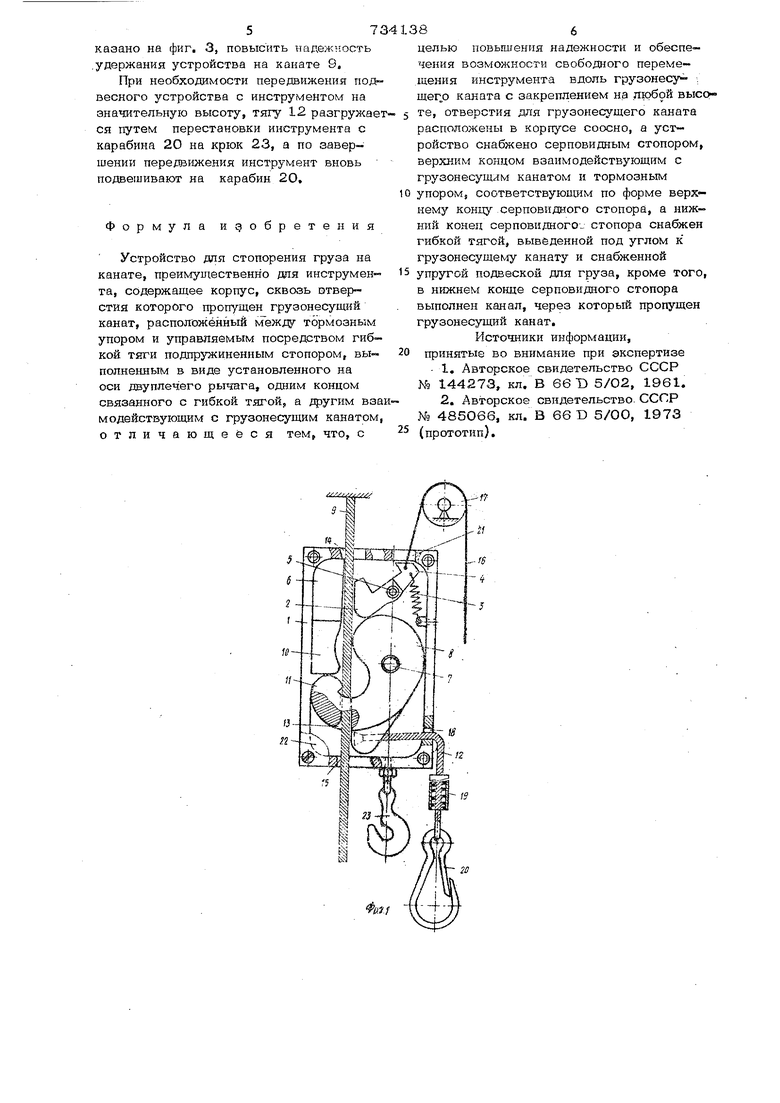
Изобретение относится к грузоподъем ным механизмам. Известно устройство для стопорения груза на канате, содержащее корпус, грузонесущий канат и тормозной механизм состоящий из канатного барабана с пружин ным приводом Q Недостатки известного устройства заключаются в сложности конструкции тормозного механизма, в излишней материалоемкости устройства, в целом и а необеспеченности свободного перемещения его по грузонесущему канату без переналадки. Наиболее близким техническим реше- ние(у1 из известных является устройство для стопорения груза на канате, преимущественно для инструмента, содержащее корпус, сквозь отверстия которого пропущен грузонесущий канат, расположенны между тормозным упором и управляемым посредством гибкой тяги подпружиненным стоггором, выпо/аенным в виде установленного на оси двуплечог рычага, одНИМ концом связанного с гибкой тягой а Щ)угим взаимодействующим с груэонесущим канатом |. Недостатком указанного устройства является невозможность свободаого пе .ремещения инструмента вдоль грузоне- сущего каната и закрепления в любом месте каната, а также невысокая надежность в случае выхода из строя стопора. Цель изобретения повышение надежности и обеспечение свободного перемещения инструмента вдоль грузонесу- щего каната с закреплением на любой высоте. Для этого отверстия для грузонесу- щего каната расположены в корпусе со- осно, а устройство снабжено серповидным стопором , верхним концом взаимодействующим с грузонесущим канатом и тормозным упором, соответствующим по форме верхнему концу серповидного стопора, а нижний конец серповидного стопора снабжен гибкой тягой, выведенной под углом к грузонесущему канату и снабженной упругой подвеской для груза. Кроме того, в нижнем конце cepnoBiifltia го стопора выполнен канал, через который npoirymoH грузонесущий .канат, На фиг, 1 показан общий вид.предлагаемого устройства (со снятой крыпг- кой) в момент перемещения по канату на фиг, 2 - то же, в момент остановки на канате без .нагруаки|на фиг. 3 - то же, в момент нагрузки на подвеске для инструмента. Устройство включает в себя корпус 1 в котором размещен тормозной механизм выполненный из управляемого стопора 2, подпружиненного прутгхиной 3, с приво.(ным рычагом 4, вращающегося на оси 5 ti взаимодействующего с тормозным упором 6, Ниже подпружиненного стопора 2 установлен на оси 7 серповидный стопор 8, верхний конец которого через грузе несущий канат 9 взаимодействует с соот ветствуюш.им ему по форме тормозным упором 10, а нижний конец 11 связан с гибкой тягой 12, Грузонесущий канат 9 проходит между стопорами и соответствую.щим им упорами, а таюке через ка™ нал 13 в нижнем конце стопора 8 и вьшеден наружу через соосные отверстия 14 и 15 в корпусе 1 и закрепленном на любом несущем элементе (балке к т, nj конструкции здания. Рычаг 4 стопора 2 связан с гибкой тягой 16, для удобства управления перекинутой через блок 17. Тяга 12 вьшеде на из корпуса 1 через отверстие 18 под утлом к груаонесуиюму канату 9, На свобод1юм конце тяги 12 закреплена упругая подвеска 19 с карабином 20 для инструмента, Ту.га 16 выведена из корпуса через овал.ьное отверстие 21„ Корпус закрыт крьплкой 22, в которой, как и в .корпусе, .закреплены оси 5 и 7 стопоров, В ниншей части корпуса установлен крюк 23, Тормозной упор 1О выполнен серпови ным с радиусом кривизны технически допустимым для изгиба грузонесущего кана та 9 при взаимодействии его со стопо ром 8 (при изгибе грузонесущего каната между тормозными элементами удерживаю ЩК& момент возрастает). Оба тормозньк упора снабжены независимыми о.Ш1н от другого регулируемыми винтами 24 и 25. Подвесное устройство для инструмента работает спедующим образом, Верхний конец грузонесуш,его каната 9 крепйП известными средствами, наприер, сжимами за конструктивный эпемент троящегося здания или сооружения (в ачестве конструктивных элементов мо ут быть балка, ферма, ригель и др.) Гибкую тягу 16 запасовь вают через отводной блок 17 или через конструктивь й элемент здания. Подачу подвесного устройства на HJOK- .ную высоту производят перемещением его по грузонесущему канат 9 посредством гибкой тяги 16. Поскольку конец гибкой тяги 16 связан с приво.штым рычагом 4, то и про цесс пере.движения подвесного устройства по грузонесущ,ему канату 9 должен начинаться с подъема приводного рычага 4, стопор 2 которого принимает положение, указанное на фиг, 1, Лишь это положение jQ-лачка, указанное на фиг, Ij позволяет не только возобновить двиясение подвесного устройства после положения СТОП, но и изменять без переналадки направление его движения по грузонесущек-г;/ канату 9, Положение СТОП основано на стремлении подвесного устройства опуститься по грузонесущему канату 9, силы трения которого, вступая во взаимсдействие с возрастающей .кривой стопора 2 и тормоэкого упора 6, создают удерживающд.й: мо менТв При этом приводной рычаг 4 принимает положение, показанное на фиг, 2„ Затем на карабин 2О подвешивают механизированный инструмент, которым может быть шлифовальная или сверлиль-тгая машинка, рубильный или клепальный молоток, либо, в зависимости от производственной потребностйд рругая разновидность инструментов Положение СТОП с инструментом на карабине 20 также основано на вз аимо действии сил трения между грузонесущим канатом 9 с серповидным стопором 8 jj тормозным упором 1О (фиг, 3), Манипулируя инструментом в процессе работы, например, при сверлении отверстий в конструктивном элементе, з.на- чительно облегчается труд работающ.их, т, е, вес инструмента воспринимается непосредственно подвесным устройством через карабин 2О, Тормозной момент в этом случае увеличивается по мере возрастания нагрузки на карабин 20, а следовательно, на гибкую тягу 12, усилие которой тюзволяет повернуть серповидный стопор 8 и, изгибая грузонесущий канат 9, как по
57341386
казано на фиг, 3, повысить надежностьцелью повышения надежности и обеспе-
.удержания устройства на канате 8,чения возможности свободного переме
При необходимости передвижения под щения инструмента вдоль грузонесу весного устройства с инструментом нащег.о каната с закреплением на любой высозначительную высоту, тягу 12 разгружает- s отверстия для грузонесущего каната
ся путем перестановки инструмента с карабина 20 на крюк 23, а по завер™ шении передаижения инструмент вновь подвешивают на карабин 20.
Формула идобретения
Устройство для стопорения груза на канате, преимущественно для инструмента, содержащее корпус, сквозь штверстия которого пропущен грузонесущий канат, расположённый межд;- тормозным упором и управляемым посредством гибкой тяги подпружиненным стопором, выполненным в виде установленного на оси двуплечего рычага, одним концом связанного с гибкой тягой, а другим взаимодействующим с грузонесущим канатом, отличающееся тем, что, с
расположены в корпусе соосно, а устройство снабжено серповидным стопором, верхним концом взаимодействующим с грузонесущлм канатом и тормозным
упором, соответствующим по форме верхнему концу серповидного стопора, а нижний конец серповидного, стопора снабжен гибкой тягой, выведенной под углом к грузонесущему канату и снабженной
пругой подвеской для груза, кроме того, в нижнем конце серповидного стопора ыполнен канал, через который пропущен рузонесущий канат.
Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетепьство СССР
№ 144273, кл. В 66 Т) 5/02, 1961.
2. Авторское свидетельство. ССГР № 485066, кл. В 66 D 5/00, 1973
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стопорения груза на канате | 1980 |
|
SU931694A2 |
| Устройство для стопорения груза | 1989 |
|
SU1654217A1 |
| УСТРОЙСТВО ДЛЯ ГРАВИТАЦИОННОГО СПУСКА ЛЮДЕЙ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ | 2001 |
|
RU2209099C1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| Транспортное средство для перевозки длинномерных грузов | 1983 |
|
SU1151487A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЛОВИТЕЛЕЙ ДЛЯ КОНВЕЙЕРОВ С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2323424C1 |
| Подвесная монорельсовая дорога | 1987 |
|
SU1470979A1 |
| Наклонный подъемник | 1986 |
|
SU1361098A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЛОВИТЕЛЕЙ ДЛЯ КОНВЕЙЕРОВ С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2350915C1 |
Й/г.5
