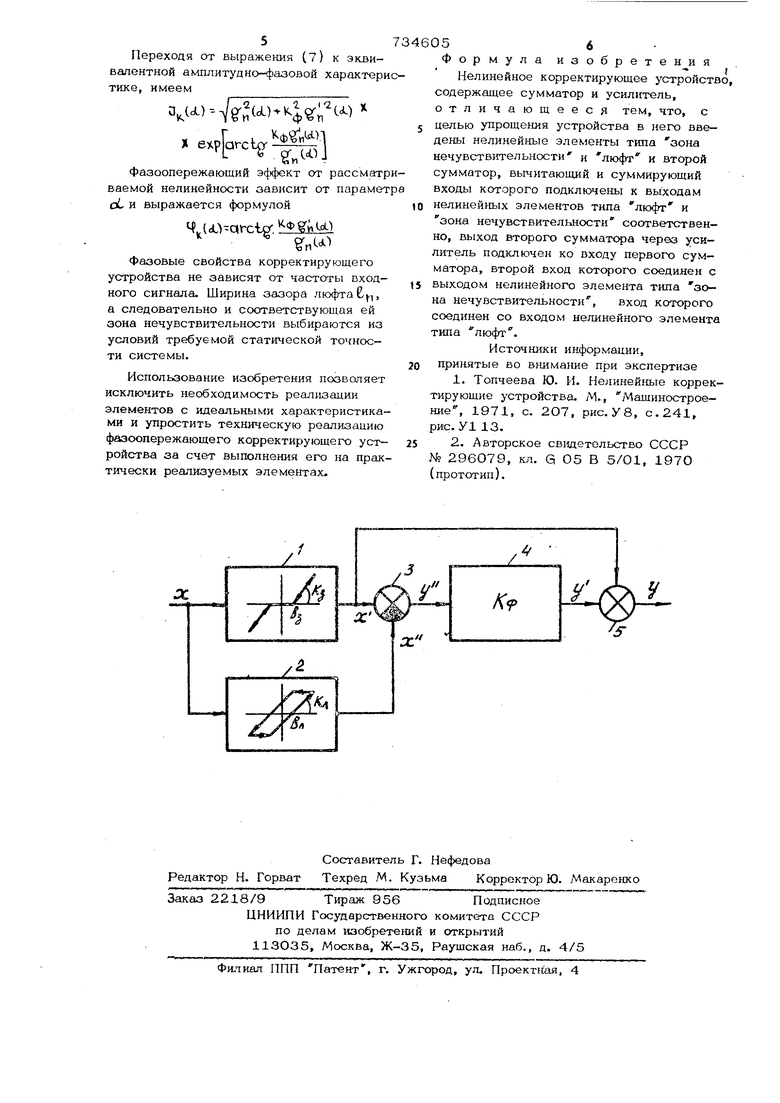
Устройство относится к технике автоматического регулирования и может быть использовано в системах автоматического управления для улучшения их динамических характеристик, в частности для повышения быстродействия и уменьшения перерегулирования. Известны нелинейные корректирующие устройства подобного назначения, которые содержат нелинейные элементы сумматоры, усилители, множительные устройства, логические элементы и позволяют получить фазовое опережение сигнала, а как следствие - повысить ка чество процессов управления в системах автоматического регулирования . Такие системы отличаются значител сложностью технической реализации. Наиболее близким к предлагаемому по техтшческой сутдности является кирре тирующее устройство, содержащее усилитель и сумматор, составляющие одну из параллельных ветвей корректирующего устройства, а другая ветвь состоит иа последовательно соединенных дифферелшфующего элемента и двухлозиииошюго релейного элемента ГзТ. Недостатком указанного устройства является необходимость использования дифференцирующего и релейного элементов с идеальными характеристиками, практическая реализация которых затруднена Применение дифференцирующего и релейного элементов снижает эффективность корректирующего устройствеи Цель изобретения - упрощение технической реализации корректирующегх) устройства за счет выполнения его на практически реализуемых элементах. Эта цель достигается тем, что в корректирующее устройство введены нелинейные элементы типа зона чувствительности, люфт, и второй сумматор, вычитающий и суммирующий входы которогх) подклкэчены к выходам нелинейных элементов типа люфт и зона нечувствительности соответственно, выход второго сумматора через усилитель подключей ко входу первого сумматора, второй вход которого соединен с выходом нелинейного элемента типа зона нечувст вительности, вход которого соединен со входом нелинейного элемента люфт. На чертеже представлена структурная схема нелинейного корректирующего устройства, где 1 - нелинейное звено типа зона нечувствительности ,. 2 - нелинейное звено типа люфт, 3 - вычитающий элемент, 4 - безынерционный усилитель форсировки, 5 - суммирующий элемент. Устройство работает следующим образом. Если входной сигнал Х (см. чертеж) изменяется во времени по синусоидальному закону X-Asih«jt)t,(l) , то выражение первой гармоники :у выход ного сигнала имеет вид . Оо ,0. (,oL)- соответственно гармонические коэффициенты пе- редачи нелинейности типа зона нечувствительности и люфт. К ф - коэффициент формировки. Как следует из (l), гармонический коэффициент передачи корректирующего устройства записывается; (2) Размыкая цепь сигнала на выходе сумматора 5 (см. чертеж) и записывая D-vtc -) , Эд (.сО через коэффициенты а ш--,ш , ) гармо1шческого коэффициента передачи к ректирующего устройства можно записат выражение ( me g(cL),g(d,gj((i.Vкоэффициенты гармонической линеаризац ct) - частота синусоидаль ного воздействия; р - оператор дифференци рования; КА- коэффициент форсиро ки. Для того, чтобы в вьфажении (З) удовлетворилось равенство вида (d.--(i.(4) проводят синтез параметров для нелиней ного звена типа зона нечувствительнос ти. 7 54 С Этой целью используется формула Я. 3. Цыпкина, позволяющая определить вид нелинейной характеристики Ф (d.) по известному (f (dJ) В данном случае на основании равенства (4) формула записываетсяS/.K- boL )--sH) 2 Ограничившись четырьмя членами в разложении (5), что обеспечивает практически достаточную точность расчета, можно записать 4,.(l)MT)-k(i)- Построение статической характеристики по выраже1шю (б) и ее аппроксимация дают следующие значения параметров для нелинейного типа зона нечувствительностиГ,K,,(5-l,2U, где Ку - соответственно ширина зазора и угла наклона статической характеристики люфта. Выбор параметров зоны нечувстви-тельности, в соответствии с расчетом дает следующие выражения гармонического коэффициента передачи корректирующего устройства a(tv-KU uj p, где, К(А,и;)--Кф -fgn(C). Следовательно, первая гормоника у (см. чертеж) промежуточного сигнала предлагаемого корректирующего устройства представляет собой идеальную производную входного сигнала nPj - нелинейным коэффициентом K(i.,UJ/усиления по производной, фазовый сдвиг первой гармоники равен - - На основании вь1шеприведенных рассуждений выраже1ше (2) принимает вид S(}-cyu}V . - UU Р или формально соблюдая аналогию с записью линейных элементов w,,(dl, , g CcLVO Следовательно, гармонический коэффициент передачи рассматриваемого корректирующего звена формально эквивалентен линейному форсирующему звену с той лишь разницей, что его параметры К и Т нелинейны. 5 Переходя от выражения (7) к эквивалентной амплитудно-фазовой характери тике, имеем в..с1, Фазоопережаюший эффект от рассматр ваемой нелинейности зависит от парамет оС и выражается формулой Ч (di -orctg. . Фазовые свойства корректирующего устройства не зависят от частоты входного сигнала. Ширина зазора люфта 6,, а следовательно и соответствующая ей зона нечувствительности выбираются из условий требуемой статической точности системы. Использование изобретения позволяет исключить необходимость реализации элементов с идеальными характеристика ми и упростить техническую реализацию фазоопережающего корректирующего устройства за счет выгаэлнения его на прак тически реализуемых элементах. 05 Формула изобрете я Нелинейное корректирующее устройство, содержащее сумматор и усилитель, отличающееся тем, что, с целью упрощения устройства в него введены нелинейные элементы типа зона нечувствительности и люфт и второй сумматор, вычитающий и суммирующий входы которого подключены к выходам нелинейных элементов типа люфт и зона нечувствительности соответственно, выход второго сумматсра через усилитель подключен ко входу первого сумматора, второй вход которого соединен с выходом нелинейного элемента типа зона нечувствительности , вход которого соединен со входом нелинейного элемента типа люфт. Источники информации, принятые во внимание при экспертизе 1.Топчеева Ю. И. Нелинейные корректирующие устройства. М., Мащиностроение, 1971, с. 2О7, рис, У8, с. 241, рис. У1 13. 2.Авторское свидетельство СССР ,N9 296О79, кл. 6 05 В 5/О1, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU591816A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1970 |
|
SU283355A1 |
| Следящая система | 1980 |
|
SU962841A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
/
Х(
/(р
