Изобретение относится к автоматике и может быть использовано в системах управления горнотранспортными работами в карьерах.
В известной системе управления автотранспортом в карьере по прибь ии автосамосвала на контрольный пункт с помощью датчика номера автосамосвала и блока опознавания номер самосвала поступает в блок управления. Блок управления ,Q учитывает рейс водителю данного самосвала и машинисту экскаватора к которому он был направлен. Далее блок управления по заданной программе выбирает маршрут следующего рейса для дан- ,5 ного автосамосвала и вьщает его на световое табло Щ .
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее блок индикации марш- 20 рутов, антенну, приемо-передатчик, первый выход которого подключен к первому входу регистра сдвига и через блок контроля параметров кода к первому входу блока сравнения, первый вход через блок программного управления подключен к второму аходу регистра сдвига, а второй вход - к первому выходу регистра сдвига, третий вход которого соединен с выходом датчика номера автосамосвала и вторым входом блока сравнения, третий вход которого подключен к выходу датчика вида объекта, а другие входы к соответствующим выходам регистра сдвига C2j .
Известным устройствам автоматического адресования автосамосвалов присущи следующие недостатки: низкая надежность передачи и приема информации}, необходимость проведения обмена информацией с пунктом управления в непосредственной близости от его считьтающих устройств, а не из любой точки карьера.
Цель изобретения - повьш1ение Точности работы устройства.
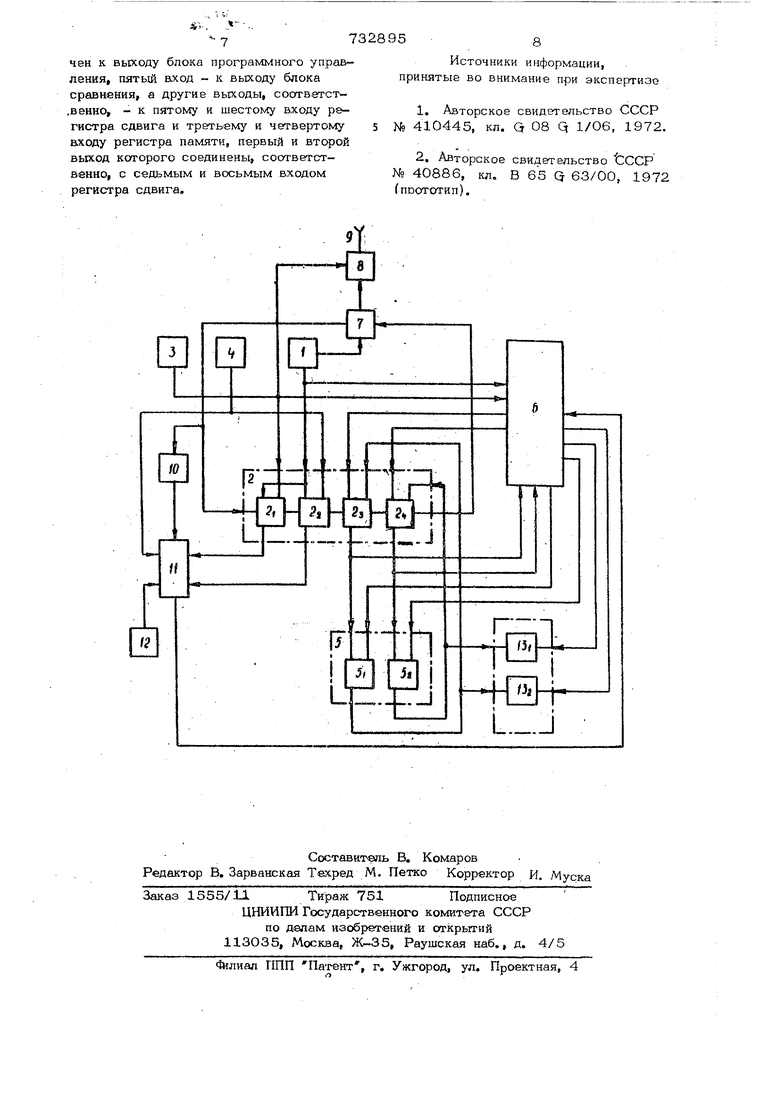
Поставленная, цель достигается тем, что в устройство введены блок логического управлекий записью регистр памяти, датчик загрузки автосамосвадд я управпяемьй аттенюатор, вьгеод которогоподключен к антенне, а аход - к датчику Загрузки автосамосвала, к первому ахо ду блока логического управления записью и к четвертому входу регистра сдвига, другие выходы которого соединены с вторым и третьим входами блока логического управления записью и через регистр памяти подключены к соответствующим вхоаагл блока индикации, другие входы которого соединены, соответственно, с первым и вторым вькодом блока логического управления записью, четвертый вход которого подключен к выходу блока программного управления, пятый вход - к выходу блока сравнения, а другие выходы, соответственно - к пятому и шестому входу регистра сдвига и третьему и четвераюму входу р-егистра памяти, первый и второй выход которого соединены, соответственно, с седьмым и восьмым входом регистра сдвига. На чертеже приведена структурная схе ма устройства для автоматического адресования и контроля движения автосамосвалов. Устройство содержит блок 1 программного управления, регистр 2 сдвига, име щий группы разрядов 2, 2, 2, 2ц , е которые записьюаются соответственно , коды - вида объекта номера автосамос- вала, номера экскаватора, номера пункта разгрузки, датчик 3 загрузки автосамосвала, датчик 4 номера автосамосвала, ре гистр 5 памяти, в группах разрядов которого 5 и 5g запоминаются, соответственно, коды номера экскаватора и номера разгрузки, блок 6 логического управления записью, приемо-передатчик 7, управляемый аттенюатор 8, антенну 9, блок 10 контроля параметров кода, блок 11 сравнения кодоЕ5, датчик 12 вида объекта, блок 13 индикации с итщикаторами .13.J и 13 которые предназначены, соответственно, для индикации номера экскаватора и номера пунктй разгру-зки
Устройство устанавливается в кабине автосамосвала. При въезде автосамосва- ла в карьер или после разгрузки водитель нажатием кнопки включения устройства в режим передачи запрашивает из ЛЮ0ОЙ точки карьера пункт управления. Приемо-передающее устройство пункта управления, находящееся все время в ре- жиме дежурного приема, в ответ на это обращение автоматически переключается в режим передачи и отправля-ет данном;у 73
тель может начать новый цикл, запросив новые адреса.
Устройство работает следующим образом
При нажатии пусковой кнопки (на чертеже отсутствует) блока 1 одиночный импульс с выхода блока 1 записьшает в регистр 2 код вида- объекта {группа разряда 2), для которого готовится сообщение. Эт.от код задается- в регистр 2 датчиком 3, код номера автосамосвала зада.ется (группа разряда 2 ) датчиком 4j а коды номера экскаватора и разгрузки поступают (группа разрядов 2 и 2ц ) с выходов регистра 5 (группа разрядов 5 и 5g ), Запись кодов в группы разрядов 2, и 2д регистра 2 производится в любом сеансе связи, а сигналы разрешения записи в группы разрядов 2 . и 2ц регистра 2 подаются по сигналу с выхода блока 1 через блок 6, 54 автосамосвалу ответ. Устройство, перек-, лючившись автоматически к этому моменту времени в режим приема, принимает ответ пункта управления Ответ содержит номер экскаватора и номер разгрузки куда доп/к8н следовать автосамосвал, Оба эти номера заносятся в регистр 5 памяти, а номер экскаватора вьшодится на блок индикации, установленный в кабине автосамосвапа. После погрузки у экскаватора водитель вторично нажатием кнопки включает свое устройство и, после обмена информацией с экскаватором, на блоке индикации адрес эскаватора сменяется нулями, и индицируется адрес пункта, на котором автосамосвал должен разгрузиться. Машинист экскаватора в случае технологической необходимости (необходимо вывести скалу вместо руды) может поменять ранее данный адрес разгрузки;, в этом случае в регистре памяти старый адрес стирается а заносится новый. При прибытии в пункт разгрузки до опорожнения кузова водитель проводит сеанс связи с пунктом .разгрузки, после чего на блоке индикации появляются оба адреса, где автосамосвал был. После разгрузки водитель автосамосвала обязан отметить выполненный рейс проведением ч етвёртого по счету сеанса связи, В этом случае происходит обмен информацией между автосамосвалом и пунктом управления, в результате чего на блоке индикации, водителя индицируются только нули, что сигнализирует о регистрации рейса на пункте управления. Далее води- . После того, как необходимый для передачи код в регистре 2 записан, сиг нал, появляющийся на вьрсоде блока 1, включает приемо-передатчик 7 на пере да|Чу, и код иэ регистра 2 поразрядно поступает на второй ьход приемо-передатчика 7. Промодулированный кодовой посылкой высокочастотный сигнал с выхода приемо-п.ередатчика 7 подается через аход аттенюатора 8 в антенну 9, Режим работы аттенюатора 8 задается по его второму аходу датчиком 3 загру ки. При пустом кузова автосамосвала сигналы датчика 3 загрузки таковы, что аттенюатор 8 работает с нулевым ослаб лением. Высокочастотньй сигнал в этом случае излучается и принимается -приемо передатчиком 7 в режиме дальней свя зи, т.е. автосамосвал может запросить обслуживание и получить ответ в любой точке карьера. При загруженном кузове автосамосвала датчик 3 включает атте поатор 8 в режим максимального ослабления высокочастотного сигнала. Уст ройство переходит в режим ближней связи. Мощность, излучаемая антенной 9, и чувствительность приемника значительно уменьшаются. Радиус зоны связи уменьшается. Провести сеанс связи в этом режиме автосамосвал может тольк пребьтая в непосредственной близости о нужного ему пункта, что позволяет конт ролировать правильность выполнения водителем заданного марщрута. После передачи всей кодовой посылки блок сигналами,, подаваемыми на вход приемо-передатчика 7, переключает его в режим приема. Ответное сообщение принимается 9 и через аттенюа тор 8 поступает на вход приемника при емо-передатчика 7, с выхода которого кодовая комбинация поступает на вход последовательной записи регистра 2 и одновременно на вход блока 10, где проверяется соответствие принятьк элементов кода и всей посылки эталону. Если в пришедщем сообщении сбоев по параметрам кода не обнаружено, то на выходе блока 1О контроля параметров кода появляется импульсный сигнал окон чания приема, поступающий на блок 11, который проверяет поступившее сообщение на адресную принадлежность: если коды, подаваемые на первый и второй его аходы от датчика 12 вида объекта и датчика 4, совпадают с кодами от ре гистра 2 сдвига, то сигнал с вьрсрда блока 11 сравнения кодов поступает в блок 6, который по этому сигналу вырабатьюает импульсы разрешения записи из регистра 2 в регистр 5, а также снг налы разрешения индикации номера экскаватора и номера разгрузки, подаваемые на блок 13 и щикaции. После перезаписи содержимого регистра 2 в регистр 5 блок 1 запрещает прием, и сеанс связи заканчивается, а водитель автосамосвала риступает к выполнению очередной стадии технологического рейса. Данное устройство позволяет управлять совместной работдй экскаваторов и автотранспорта в открытом цикле, т. е. без предварительного закрепления автосамосвала за каким-либо адресом Это обеспечивает минимум тахнологичесKiDc потерь при добыче и возможность ведения добычи руды в режиме глубокого ее усреднения по заданным параметрам. Формула изобретения Устройство для адресования и контроля движения автосамосвалов, содержащее блок индикации маршрутов, ан- тенну приемо-передатчик, первый выход которого. подключен к первому входу регистра сдвига и через блок контроля параметров кода к первому входу блока сравнения, первый аход через блок программного управления - к BTOpoN-ry входу регистра сдвига, а второй вход - к первому выходу регистра сдвига, третий аход которого соединен с выходом датчика номера автосамосвала и вторым аходом блока сравнения, третий вход которого подключен к выходу датчика вида объекта, а другие аходы - к соответствующим выходам регистра сдвига, отличаю1ц е е с я тем, что, с целью повышения точности работы устройства, в него введены блок логического управления записью, регистр памяти, датчик загрузки автосамосвала и управляемый аттенюатор, выход которого подключен к антенне, а аход - к датчику загрузки автосамосвала, к первому аходу блока логического управления записью и к четвертому аходу регистра сдвига, другие выходы которого соединены с вторым и третьим аходами блока логического управления записью и через регистр памяти подключены к соответствующим входам блока индикации, другие аходы которого соединены, соответственно, с первым и вторым вы- ходом блока логического управления записью, четвертый вход которого подклю-
чен к выходу блока программного управления, пятый аход - к выходу блока сравнения, а другие выходы, соответст.венно, - к пятому и шестому входу регистра сдвига и третьему и четвертому аходу регистра памяти, первый и второй выход которого соединены, соответственно, с седьмым и восьмым входом регистра сдвига.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР NO 410445, кл. Q 08 Q 1/06, 1972.
2.Авторское свидетельство tCCP № 40886, кл. В 65 Q 63/00, 1972 (поототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования и контроля движения автосамосвалов | 1972 |
|
SU440315A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1974 |
|
SU470457A1 |
| Устройство для программного управления грузотранспортными механизмами | 1976 |
|
SU595742A1 |
| Система для автоматического управления экскаваторноавтомобильным комплексом | 1975 |
|
SU577534A1 |
| Устройство для контроля движения транспортных средств | 1980 |
|
SU936006A1 |
| Система для управления и контроля работы погрузочно-транспортных средств | 1975 |
|
SU516074A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
