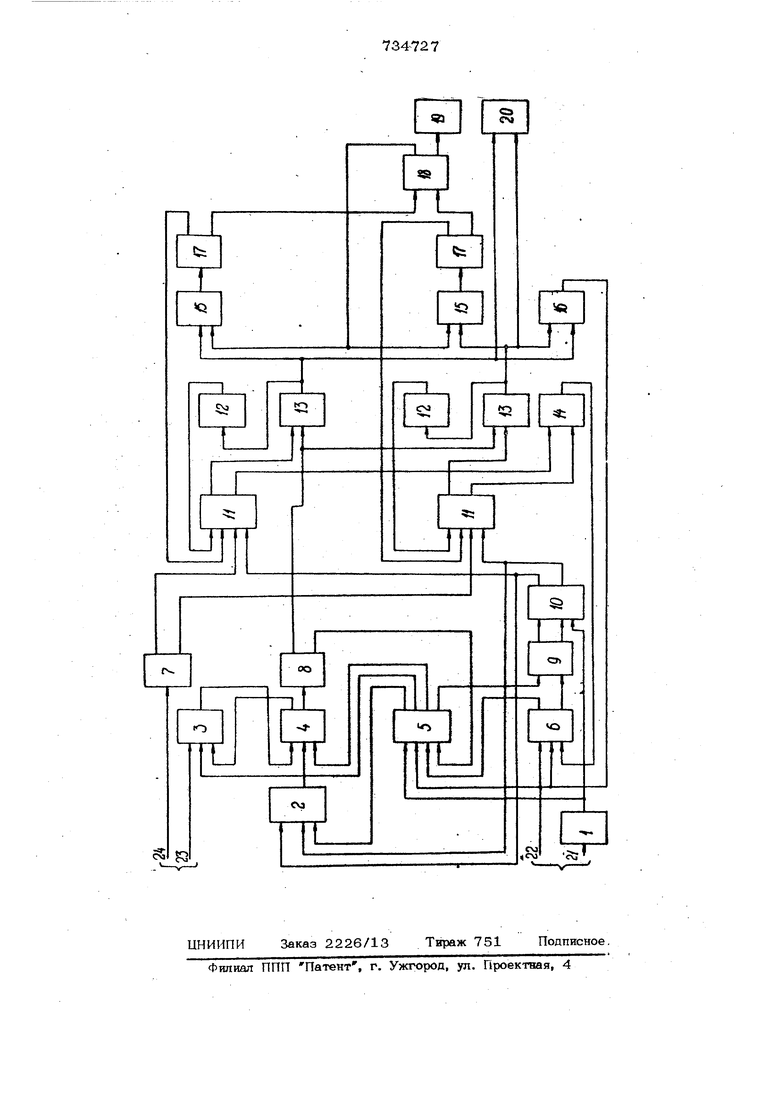
Изобретение относится к вычислитапьной технике и может быть использовано в автоматизированных системах оперативного управления транспортировкой пен лезных ископаемых автомобильным транс портом на карьерах горнорудной, угольной, нерудной и других отраслях промышленности. Изобретение может быть использова но в технологических процессах, где тре буется осуществлять выбор адреса следо вания каждого транспортного средства из множества имеющихся маршрутов с целью достижения максимальной эффективности выполняемых работ по погруэке и транспортированию грузов. Известно устройство для управления транспортными средствами, содержащее блоки ввода данных о числе автосамосвалов для каждого экскаватора и блоки качества полезного ископаемого для каж дого экскаватора, в которые вводятся данные оператором с пульта управления вручную i, Выходы блоков ввода данных о числе автосамосвалов и блоков качества полезного ископаемого для каждого экскаватора соединены с соответствующими блока- ми умножения, выходы которых подключены к блоку суммирования произведений, выходы блока ввода данных о числе автосамосвалов через блоки разрешения подключены к блоку суммирования числа автосамосвалов, выход которого и выход блока суммирования произведений подключены к блоку деления. Выход блока деления и выход блока ввода данных о необходимом составе усредненной руды подключены к блоку сравнения. В устройстве хранятся исходные данные (число автосамосвалов, состав руды в каждом забое, промежуточные результаты и результат вычислегТой.Г1осле операции сравнения результата вычислений с фактическим составом усредненной руды, поступающей на обогащение, в индикаторном блоке фиксируется величина расхождения состава усредненной руды. На основанни этого оператор, манипулируя данными блоков ввода, корректирует число автосамосвалов, направляемых к экскаваторам. Скорректированный через несколько шагов вычислений сигнал о необходим числе автосамосвалов для того или иного экскаватора, обеспечивающий ползчение усредненной руды заданного свойства, направляется в автоматизированную подсистему управления работой автотранспорта на карьере. Однако данное устройство не позволяе оперативно контролировать текущее значе ние усредненного показателя качества, в нам отсутствует также возможность опре деления оптимального маршрута для каждого разгрузившегося автосамосвапа. Кроме того, процесс управления не авто матизирован, так как при вычислениях должен принимать участие оператор. Наиболее близким по технической сущ ности к изобретению является устройст во, содержащее матрицу маршрутов, маТ{жцу поиска адресов, логические элемен ты, распределитель, коммутатор, схему учета, схему сравнения, индикаторы, блок управления, блок изменения алгоритма, первый выход которого подсоединен ко входу логического элемента пунктов назначения, второй выход - ко входу логического элемента составов, вторые входы логических элементов пунктов назначения составов соединены с гори- зо{ггальными и вертикальными щинами поиска адреса, входы которой подсоедийены через матрицу маршрутов к выхода коммутатора, входы коммутатора, соединены с выходами распределителя, подклю чаннся о к выходам блока управления, вход которого через схему И и индикаторы подсоединен к выходам логических элеменггов пунктов назначения и составов, вторые вьсходы логических элементов пунктов назначения и составов соединены через с-хему учета и схему сравнения с одним входом блока изменения алгоритма, другой вход которого через переключатель режима работы связан с выходом распредапителя 2Л .С помощью блока управления и распре делителя осуществляется программный опрос марщрутов, которые задаются путем соединения выходов распределителя со входами матрицы маршрутов через коммутатор. В качестве критерия очеред ности опроса маршрутов используется среднее время пробега состава по данному маршруту. Причем выбор данного :маршрута с помощью схемы сравнения (оказывается возможным только в том случае, если этот маршрут не занят под важным составом. В логические элементы составов вводится следующая информация: мертополо- жение состава, качество горной массы в думкарах, ориентировка, а в логические элементы пунктов назначения вводится местоположение пункта назначения, готовность к работе, качество горной массы, возможный вариант погрузки или выгрузкио На выходе логических элементов составов и пунктов назначения появляется последовательность импульсов, соответствующая маршрутак, удовлетворяющим выше указанным условиям. Для поддержания заданного соотношения го(ной массы служат схемы учета и сравнения рудньсх. составов, блок изменения алгоритма и переключатель режимов работьи С логических элементов составов и пунктов назначения в схему учета поступает информация обимеющемся на карьере количестве составов с рудой. -Эта информация в виде двойного числа с выхода схемы учета подается на схему сравнения. При совпадении по времени импульсов на входах схемы сравнения с выхода этой схемы подается импульс на вход блока управления распределителем. Подача продвигающих импульсов с блока управления на аход распределителя npefepaщается. Распределитель останавливается и через индикаторы рекомендаций вьщается решение о выборе оптимального мёрш- ,рута и адреса посылки состава. Устройство работает-циклически. При выполнении вьщанного решения, вводимая в логические элементы информация, изменяется, и происходит поиск следующего решения. Однако данное устрсйство имеет невььсокое быстродействие и предназначено для оперативного управления горнотранспорт ными работами только на карьерах с железнодорожным транспортом. Эффективность испольаова1шя данного устройства на карьерах с автомобильным транспортом снижается из-за того, что осуществляется выбор маршрутов только по критерию минимального времени пробега составов. Цель изобретения - повышение эффективности работьи Поставленная цель достигается тем, что в устройство, содержащее распредели-твль, выходы которого подключены соот ветственно ко нходам коммутатора, выходы которого подключены соответственно ко входам блока кодирования качества 573 полезного ископаемого, блок памяти сред него показателя качества, блок управления, блок памяти ситуации, блок сравнения и блок индикации маршрутов введены блоки вычисления качества, задания приоритетов, контроля обслуживания требований, общего выполнения плана, индикации плана, элементы ИЛИ, элементы задерноси, блоки выбора разрешенного маршрута, блоки контроля состояний маршрутов, блоки счета автосамосва- лов на маршруте, блоки- контроля выполнения плана, причем первый аход блока управления и вход коммутатора подключены к выходу блока задания прио ритетов, вход которого соединен с первым аходом устройства, второй вход блока управления и первый вход блока ко1ггропя обслуживания требований соединены с вькодом первого элемента ИЛИ входы которого соединены с выходами блоков контроля состояний маршрутов, третий аход блока управления соединен с первым выходом блока контроля обслуживания требований, второй вход которого соединен со вторым входом устройства, третий вход соединен с выходом второго элемента ИЛИ, входы которого подключены соответственно к первым вы ходам блоков выбора разрешенного марщр та, четвертый аход блока управления сое динен с первым выходом блока ср&внения вход которого подключен к первому выходу блока вычисления качества, второй выход блока сравнения подключен к пер;вым входам блоков контроля состояний маршрутов, первый выход блока управлени-7 соединен с управляющим входом бхгока кодирования качества полезного ископаемого, выход которого соединен с первым аходом блока вычисления качества, второй выход блока управления соединен с первым аходом блока памяти среднего показателя качества, второй вход которого подсоединен к третьему входу устройства, третий аход блока памяти среднего показателя качества соединен со вторым выходом блока вычисления качества, а выход соединен со вторым аходом блока вычисления качества; третий выход блока управления соединен с третьим аходом блока вычисления качества, четвертый выход блока управления соединен с первым входом распределителя, второй вход которого соединен со вторым вькодом блока контроля обслуживания требований, второй вход каждого блока котгропя состояний маршрутов подключен ко второму вькоду соответствуюш.его блока выбора разрешенного маршрута, первый вход которого соединен с выходом соответств тощего элемента задержки, второй вход соединен с первым выходом соответствующего блока контроля вьшолнения плана, третий аход каждого блока выбора раз- решенного маршрута соединен с соответ ствующим выходом блока памяти 1ситу- аций, вход которого соединен с четвертым входом устройства, выход каждого блока контроля состояний маршрутов соединен со входом соответствующего элемента задержки, со входом блока индикации маршрутов с перввгЫ аходом соответствующего блока счета автосамосвалов на маршруте, второй вход которого соединен с первым выходом блока контроля обще- ™ вьтопнения плана, второй вькод которого соединен со аходом блока индикации плана, выход каждого блока счета автосамосвалоа на маршруте соединен со входом соответствующего блока контроля вьтопнения плана, второй выход которого соединен со аходами блока контроля общего выполнения плана, четвертый аход каждого блока выбора разрешенного маршрута соединен с соответствующим выходом коммутатора. На чертеже приведена схема устройства. Устройство содержит блок 1 задания приоритетов, блок 2- кодирования качества полезного ископаемого, блок 3 памяти среднего показателя качества, блок 4 вычисления качества, блок 5 управления, блок 6 контроля обслуживания требова- . НИИ, блок 7 памяти ситуаций, блок 8 сравнения, распределитель 9, коммутатор 1О, блоки И выбора разрешенного маршрута, элементы 12 задержки, блоки 13 контроля состояний маршрутов, элемент 14 ИЛИ, блоки 15 счета аатосамосвалов на маршруте, элемент 16 ИЛИ, блоки 17 контроля выполнения плана, блок 18 контроля общего выполнения плана, блок 18 индикации плана, блок 2О индикации маршрутов, аходы 21-24 устройства. Алгоритм управления транспортными средствами состоит из таках операций, как определение маршрута -следования (адреса экскаватора), установка минимального и максимального количества требований обслуживаемых экскаватора11Л1 Б течение заданного времени, счет копичества посланных автосамосвалов к определенному экскаватору и вьщеление адресов
77347278
экскаваторов, к которым послано больше вход блока 13 контроля состояния автосамосвалов, чем запланировано выбор маршрута,
дисциплины опроса ячеек объектов и инди-Одновременно с проверкой ограниче-
кация маршрутов и общего выполнения пл ний на маршрут осуществляется вычислена. Данный алгоритм упр 1вления автосам свал ами позволяет осуществлять ритмич ность выполнения планового задания, м нимизировать простои автосамосвалов в ;очереди по организационным причинам, контролировать вьшопнение экскаваторам сменных заданий в течение смены,поддерживать качество поступающего на обогащение полезного ископаемого в режиме усреднения. Задание маршрута следования автосамосвалов очередному автосамосвалу осуществляется в момент поступления автосамосвала на распределительный пункт. Блок з.адания приоритетов по сиг налу, поступающему с устройства сбора информации на вход 21, осуществляет подготовку блока 5 управления и комму татора 1О для работы в режиме одного из приоритетов, С устройства сбора информации через вход 22 поступает сигнал требование в блок контроля обслу живания требований, откуда поступает команда на обслуживание требования в блок 5 управления. Блок управления выдает сигнал на распределитель 9 для переключения его в следующее состояние. Если в начале работы распределитель находится в исходном состоянии, то сигнал с блока управления переключает распределитель в первое состояние и через коммутатор 10 сигнал поступит в блок 11, после чего возможны два варианта работы устройства. В первом варианте, если имеется ограничение на запрет первого маршрута по любому из сигналов, поступающим либо из блока 7, либо из блока 3.7 ко1ггропя выполнения планав либо с элк-мента 12 задержки, сигг-я&п г. зьзхода блока 11 поступает через элемекг 14 ИЛИ в блок контроля обслуживания требований. По этому сигналу из блока 6 контроля обслуживания требований выдается повторный сигнал в блок 5 управ ления, откуда сигнал, поступающий на распределитель 9, осуществляет подключ ние блока ограничений второго маршру -а и т.д, до тезе пор, пока не будет выбран разрешенный маршрут, Бб втором варианте, если запрет на первый маршрут отсутствует, с выхода блока 11 скгийл поступает только на ние показателя качества полезного ископаемого в случае погрузки автосамосвала данным экскаватором, С этой целью с выхода распределителя 9 через коммутатор 1О поступает сигнал в блок 2 коди- рования качества полезного ископаемого, в котором осуществляется кодирование величин .отклонения качества полезного ископаемого в забое от среднего значения и по сигналу с блока 5 управления этот показатель поступает в блок 4 вычисления качества. В блоке 3 среднего показателя качества содержится либо первоначальное значение среднего показателя качества, заданное с устройства сбора информации по аходу 23, либо текущее значение среднего показателя качества, .считываемое в процессе работы устройства управления из блока 4 вычисления качества. По сигналу с блока 5 управления осуществляется операция считьюания текущего среднего показателя качества из блока 3 в блок 4, где осуществляется либо суммирование, либо вычитание отклонения показателя качества со средним текущим значением. Далее в блоке 8 сравнения осуществляется анализ полученного результата,- Если полученное среднее значение показателя качества не удовлетворяет укаэанному требованию, то вьщается сигнал с блока 8 сравнения в блок 5 управления и блок осуществляет переключение распределителя 9 в следующее состояние, требование по качеству полезного ископаемого удовлетворенное, то сигнал с блока 8 сравнения поступает в блок 13 контроля состояния маршрута и с выхода блока контроля состояния соответствующего маршрута поступает сигнал через элемент 14 ИЛИ на вход блока 6 Kof-ггроля требований, где фиксируется состояние Требование обслужено и выдается сигнал в блок 5 управления, который вьщает сигнал перезаписи нового текущего значения показателя качества из блока 4 в блок 3, Одновременно сигнал с соответствующего блока 13 поступит на соответствующий элемент 12 задержки, запрещающий выбор данного маршрута на время погрузки экскаватором автосамосвала. Этот же сигнал пост паот на блок 2О индикации маршрутов высвечивая адрес следования очередному автосамосвалу, и в блок .15 счета автосамосвалов на маршруте. Для контроля ритмичности выполнения плана в блоке 17 контроля выполнения плана устанбшливается плановое и ограничительное задание, превышатощее плановое задание каждому экскаватору на известный промежуток времени. В конце заданного отрезка времени, когда все экскаваторы.начнут выполнять план или отставать с выполнением гшана, появится допопнитбльное ограничение на выбор маршрута. При выполнении ограничительного задания одним из экскаваторов приоритет на посылку автосамосва- лов будет установлен другим экскаватором. Если экскаваторы выполнят плановое задание в конце промежутка времени, то блок 18 контроля общего плаца выдает сигнал в блок 19 индикации плана о ритмичной работе экскаваторов и одновременно вьщает сигнал коррекции в блоки счета автосамосвалов на маршруте. По этому сигналу в блоках 15 счета автосамосвалов на маршруте происходит вычитание планового задания и к началу второго промежутка времени в указанных блоках 15 остается только величина отклонения текущего выполнения задания от планового за первый промежуток вре мени. Аналогично происходит контроль ритмичности выполнения плана в следующий промежуток времени.. В блоке 19 одновременно осуществля ется индикация общего количества экскаваторов, выполшпоших план за промежуток времени. С помощью коммутатора 1О в устройстве возможен как безприоритетный выбор маршрута, когда осущест вляется последовательный циклический анализ маршрутов, так и приоритетный выбор маршрута. Приоритет маршрутов устанавливается по следующим параметрам: максимальный (минимальньй) показатель качества, максимум выполнения плана, минимальное (максимальное) рао стояние от пункта разгрузки до забоя, минимальное (максимальное) время пр езда от пункта разгрузки до забоя и тЛ Коммутация маршрутов по приоритету осуществляется в коммутаторе 10, При работе в режиме заданного приоритета сигнал с элемента 16 ИЛИ посла выбор маршрута поступает в блок 6, который вьщает сигнал на распрэделитель 9, устанавливая его в исходное состояние. Далее, при поступлении очередного требования происходит анализ маршрутов, начиная с первого, и, таким образом обеспечивается более интенсивная посылка автосамосвалов по приоритетным маршрутам, нэ допуская в то же время с помошью элементов 12 задержки простоев автосамосвалов у экскаватора в очереди. Предлагаемое устройство осуществляет управление транспортом в режиме прогрессивного открытого цикла. Эффективность управления повьииается за счет выбора маршрутов автосамосва- лов по критерию управления, учитьшающему основные параметры работы горнотранспортного комплекса, В результате применения устройства уменьшится время простоя автосамосва- лов и объектов погрузки, оказывается возможной транспортировка полезного ископаемого с заданным показателем качества, обеспечится ритмичностьработы горнотранспортного комплекса. Формула изобретения Устройство для управления транспортными средствами, содержащее распределит ель, выходы которого подключены соответственно ко входам коммутатора, выходы которого подключены соответственно ко входам блока кодирования качества none3Hcff o исксжаемого, блок памяти среднего показателя качества, блок управ.ления, блок памяти ситуаций, блок сравнения и блок индикации маршрутов, отличающееся тем, что, с целью повь щения эффективности работы, в него введены блоки вычисления качества, задания приоритетов, кокгроля обслуживания требований, контроля общего выполнения плана, индикации плана, элементы ИЛИ,элементы задержки, блоки выбора разрешенного маршрута, блоки контроля состояний маршрутов, блоки счета автосамосвалов на маршруте, блоки кот-роля выполнения плана, причем первый вход блока управления и вход коммутатора подключены к выходу блока задания приоритетов, вход которого соединен с первым входом устройства, второй вход блока управления в первый вход блока контроля обслуживания требований соединены с выходом первого эл&мента ИЛИ, входы которого соединены с выходами блоков контроля состояний маршрутов, третий вход блока управления соединен с первым выходом блока Kowrpo117дя обслуживания требований, второй вход которого соединен со вторым входом устройства, третий вход соединен с выходом второго элемента ИЛИ, входы, ко торого подключены соответственно к nej вым выходом блоков выбора разрешенного маршрута, четвертый вход блока управления соединен с первым выходом блока сравнения, вход которого подключен к первому вьрсоду блока вычисления качества, второй выход блока сравнения подключен к первым входам блоков конт роля состояний маршрутов, первый блока управления соединен с управляющим входом блока кодирования качества полезного ископаемого, выход ко торого соединен с первым входом блока вычисления качества, второй выход блока управления соединен с первым аходом блока памяти среднего показателя качества, второй вход которогоподсоединен к третьему входу устройства, третий вход блока naMsiTH среднего показателя качества соединен со вторым выходом блока вычисления качества, а выход соединен со вторым аходом блока вы Числения качества, третий выход блока управления соединен с третьим аходом блока вычисления качества, четвертый выход блока управления соединен с первым входом распредапиталя, второй вход которого соединен со вторым выходом блока контроля обслуживания требований второй вход каждого блока контроля обслуживания требований, второй вход каж дого блока кокгроля состояний маршрут ов подключен ко второму юсоду соответ ствующего блока выбора разрешенного маршрута, первьй вход которого соеди- 7 ней с выходом соответствующего элемента задержки, второй аход соединен с первым выходом соответствующего блока контроля- выполнения плана, третий вход каждого блока выбора разрешенного маршрута соединен с соответствующим выходом блока памяти ситуаций, аход которого соединен с четвертым аходом устройства, выход каждого блока контроля состояний маршрутов соединен со аходом соответствующего элемента задержки, со аходом блока индикации маршрутов и с первьм входом соответствующего блока счета автосамосвапов на маршруте, второй аход которого соединен с первым выходом блока контроля общего выполнения плана, второй выход которого соединен со входом блока индикации плана, выход каждого блока счета автосамосвалов на маршруте соединен со входом соответствующего блока контроля выполнения плана, второй выход которого соединен со входом блока контроля общего выполнения плана, четвертый вход каждого блока вь{бора разрешенного маршрута соединен с соответствующим выходом коммутатора. Источники информации, принятые во вйимакие при экспертид1е 1,Авторское свидетельство СССР № 406202, кл. Q 06 F 15/50, 1973. 2,Авторское свидетельство СССР № 209850, кл. Q Об F 15/5О, 1966 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Устройство для управления подвижными и рассредоточенными объектами на карьере | 1973 |
|
SU485457A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
| Устройство для управления транспортными средствами | 1976 |
|
SU615526A1 |
| СПЕЦИАЛИЗИРОВАННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОТРАНСПОРТНЫМИ РАБОТАМИ | 1973 |
|
SU368612A1 |
| Устройство для передачи и приема информации о погрузочных и транспортных единицах | 1976 |
|
SU615520A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для обработки данных комплекса "карьер-обогатительная фабрика" | 1977 |
|
SU670949A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |