1
ИзоЬретение относится к автоматизированному синтезу сложных нелинейных механических колебатальных сис тем.
Известно устройство для полунатурного моделирования нелинейных колебательных систем, позволяющее провести синтез моделируемой части 1.
Вследствие обратного влияния объекта на возбудитель искажений из-за нелинейности объекта точность устройства невелика.
Наиболее близким по технической сущности к предлагаемому является устройство для моделирования нелинейных колебатальных систем, в котором для обеспечения заданного закона движения стола возбудителя по сигналу с выхода блока моделирования применяется следящая система 2.
Однако следящая система имеет ограниченный частотный диапазон, что при нелинейном объекте системы полунатурного моделирования вносит большие погрешности , вследствие чего известное устройство не обладает достаточной точностью при моделировании нелинейных механических колебательных систем.
Цель, изобретения - увеличение точности моделирования.не линейных механических колебательных систем.
10
Указанная цель достигается тем, что в устройство для полунатурного моделирования нелинейных колебательных систем, содержащее возбудитель колебаний, исследуемый
IS объект, установленный на столе возбудителя колебаний, датчик параметров колебаний стола, установленный на столе возбудителя колебаний, выход которого соединен со
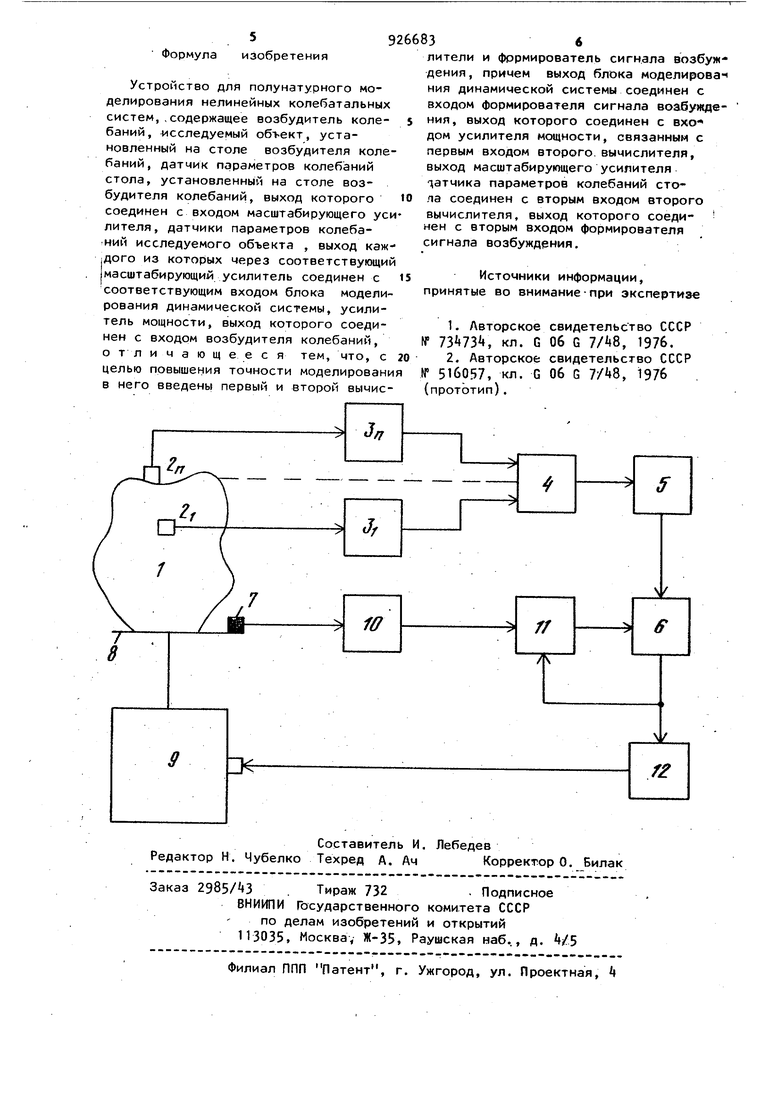
20 входом масштабирующего усилителя, датчикипараметров колебаний 1исследуемого объекта, выход каждого мз которых через соответствующий масштабирующий усилитель соединен с соответствующим входом блока моделирования динамической систе мы, усилитель мощности, выход которого соединен со входом возбудителя колебаний, дополнительно введены первый и второй вычислители и формирователь.сигнала возбуждения причем выход блока моделирования динамической системы соединен со входом первого вычислителя, выход которого соединен с первым входом формирователя сигнала возбуждения, выход которого соединен со входом усилителя мощности, связанным с первым входом второго вычислителя, выход масштабирующего уси лителя датчика параметров колебаний стола возбудителя соединен со вторым входом второго вычислителя,выход которого соединен со вторым вхо дом формирователя сигнала возбуждения. На чертеже приведена блок-схема устройства. К исследуемому объекту I прикреплен ряд датчиков 2.,., параметров колебаний исследуемого объекта, присоединенных через соответствующие масштабирующие усилители 3 к блоку моделирования динамической системы. Выход блока 4 соединен через пе вый вычислитель 5 с первым входом формирователя 6 сигнала возбуждения, датчик 7 параметров колебаний стола, установленный на столе 8 возбудителя 9 колебаний, соединен через масштабирующий усилитель 10 датчика 7 с первым входом второго вычис лителя 11, выход формирователя 6 через усилитель 12 мощности соединен со входом возбудителя 9 колебаний. Устройство работает следующим образом. Исследуемый объект 1, представляющий часть системы с неизвестной структурой, совершает колебания, задаваемые столом 6 возбудителя 9 коле . Датчики 2, фиксируют пара метры исследуемого объекта 1 в разных местах. Они усиливаются усилителями 3 Зг), с выходов которых сиг налы , пропорциональные параметрам исследуемого объекта 1, поступают в блок Ц моделирования динамической системы. Блок моделирует известную часть системы и позволяет легко изменять параметры моделируемой част системы и определять при этом нужный закон движения стола 8 возбудителя 9 колебаний. Этот закон U(t) вырабатывается известными, методами блоком k моделирования динамической системы и с его выхода подается на первый вычислитель 5 для вычисления коэффициентов АО , Лп разложения пЬ полиномам Лягерра U(t.)AoLo(t),L1(t)..(t), )LLtt)rVt; где Lt(t) - полиномыЛягерра. С выхода блока 5 коэффициенты Ag, А,..., АП подаются на первый вход формирователя 6 сигнала возбуждения y(t) . 1(1)--П...,Д..,кНа(ЦНБ(А,)...Н4Ао) где HI.(AJ) - полиномы Эрмита от коэффициентов AJ . Сигнал движения стола 8 r(t) возбудителя 9 колебаний снимается датчиком 7, усиливается усилителем 10 и подается на второй вычислитель 11 для вычисления коэффициентов связи Са|й.,.к, определяемых по алгоритму /ffTf )/2 т , CD,S,..., 1С()На(Ьо)н5(,М... -- Hк(Bп)..)dt где В , В. , ., . , В„- коэффициенты разложения сигнала движения стола 8 возбудителя 9 r(t) по полиномам Лягерра, r(t-)boLo(t)(t)...&nLn(t) . (i)L,j(t)e1tt HI(BQ) - полиномы Эрмита от коэффициентов Bj . Сформированный сигнал возбуждения y(t) возбудителя 9 колебаний с выхода формирователя 6 через усилитель мощности 12 подается на Вход возбудителя 9 колебаний. Таким образом, выполнение устройства в соответствии с изобретением позволяет получить движение стола, близкое к требуемому, распределенному по нормальному закону r(t)-u{t), что увеличивает точность получаемых результатов исследования реальных объектов. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU661567A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для полунатурного моделирования колебательных систем | 1980 |
|
SU922800A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516057A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU607240A1 |
| Устройство для моделирования колебательных систем | 1978 |
|
SU698014A1 |
| Устройство для определения характе-РиСТиК упРугОСТи и дЕМпфиРОВАНияНЕлиНЕйНОгО упРугОгО Об'ЕКТА пРипОлуНАТуРНОМ МОдЕлиРОВАНии | 1979 |
|
SU813467A1 |
