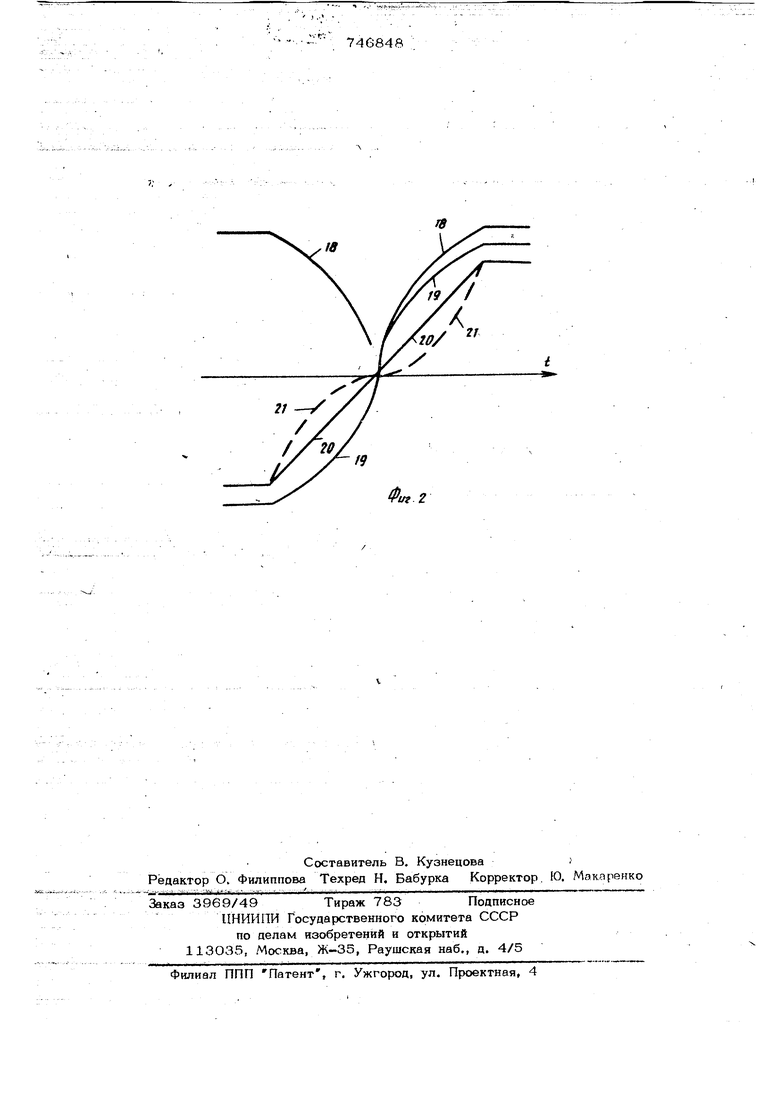
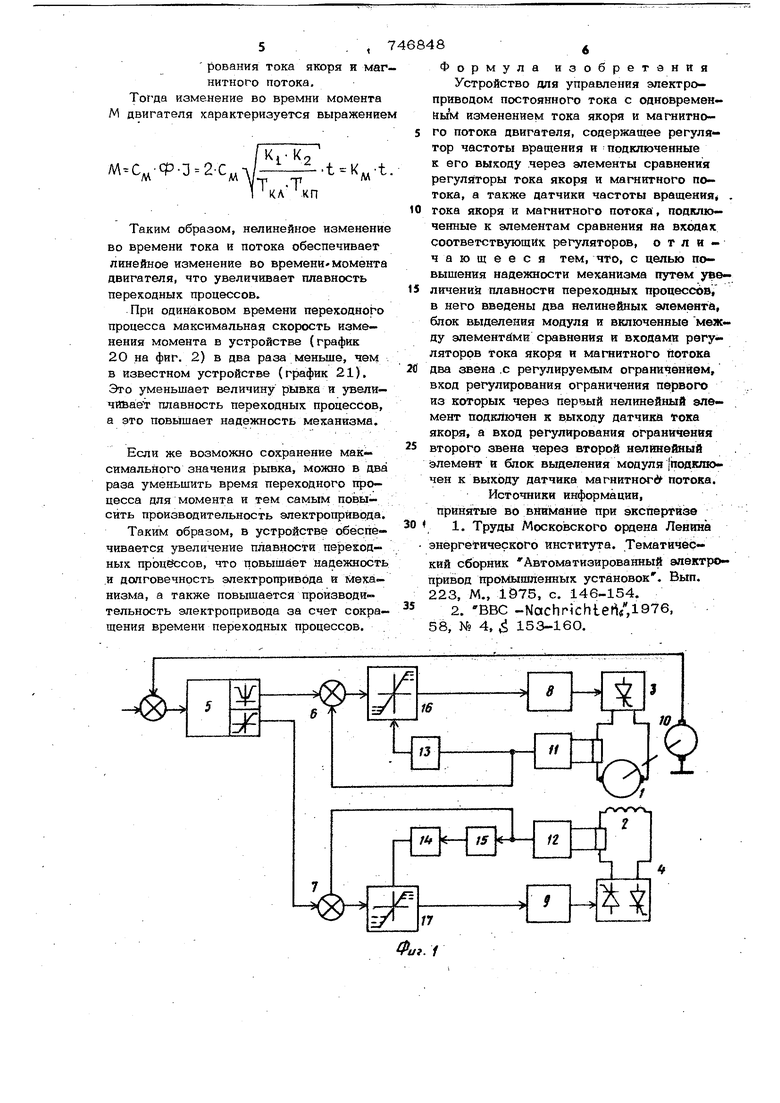
И;Л бретение относится к области электроприводов, а именно к электроприводам с реверсом Поля и одновременным изменением тока якоря и магнитного пот ка двигателя, и может применяться в электроприводах подъемно-транспортных машин, экскаваторов и прокатных станов. Известно устройство для управления электроприводом -постоянного тока, содер жащее регулятор частоты вращения и подключенный к его выходу ийтегральный регулятор тока якоря и пропорциональный регулятор магнитного потока, а также датчики частоты вращения, тока якоря и магнитнрго потока Это уст ройство обеспечивает одновременное изменение тока якоря и магнитного потока однако, определяемый этим устройством нелинейный характер из-менеиия момента цвигателя в .процессе его увеличения и реверса приводит к увеличению действующих на механизм рывков, это уменьшает плавность переходных процессов и уменьшает надежность механизма. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления электроприводом постоягнного тока с одновременным изменением тока якоря и магнитного потока, включающее регулятор частоты вращения и подключенные к его выходу через элементы сравнения пропорционально-интегральные регуляторы тока якоря и магнитного потока, а также датчики частоты вращения, тока якоря и магнитного потока, подключенные к элементам сравнения на входах соответствующих регуляторов . Это устройство обеспечивает практически линейное изменение тока якоря и магнитного потока во время переходных процессов, однако при этом пропорциональный произведению этих величин момент двигателя изменяется по параболическому закону, а при переходе к установившемуся значению этого момента возни- Кают большие рывки, определяющие дополнительное возмущающее воздействие на электромагническую систему электропривода, что уменьшает плавность перв ходиык процессов и тем самым умень шает надёжность к ёханизма. . Цель изобретения - повышение надежности механизма путем увеличения плавности переходных: процессов. Эта цель достигается тем, что в уст ройство для управления электроприводом постоянного тока с одновременным из.менением тока якоря и магнитного потока двигателя, содержащее регулятор час тоты вращения и подключенные к его выходу через элементы сравнения ре гуляторы тока якоря и магнитного потока, а также датчики частоты вращения, тока якоря и Магнитного потогса, подключен/ные к элементам сравнения на входах соответствующих регуляторов, введены два нелинейных элемента, блок вый(ёле кия Модуля и вкшоченные мёй:ау эл&1 1ен- тами сравнений н входами регуляторов тока якоря и магнитного потока два зве :на С рёгулируемь1М ограничением, вход регулирования ограничения tiepSoro из когорых через первый нелинейный эле мёйт соединен q выхойом датчика тока якорй, а вход регулирования ограничения Ёторого звена через второй нели- ;нейный элемент и блок выделений модуля сбеаинен с выходом датчика магнитногопотока. На фиг. 1 приведена схема устройства} на фиг. 2 - графики изменения TOka яКбря, йагнйтноРЬ irtOTOKa в момента дви гателя во время переходного процесса. .Электропривод содержит двигатель 1 р обмоткой независимого возбуждения 2 йёрейерсиёный преобра;зователь 3 ё цепи якорйи реверсивный преобразователь 4 в цепи возбуждения. Устройство для уп- равлеайя электроприводом включает регу лятор частоты вращения 5 и подключенSie к его выходу через элементы сравнения б и 7 пропорционально-интегральные регуляторы тока якоря 8 и магнитного потока 9, а также датчики частоты вращения 10, тока якоря 11 и магнитно го потока 12, подключенные к элемента сравнения на входах соответствующих регуляторов. В устройство дополнительно введены два нелинейных элемента 13 и 14, блок выделения модуля 15 и включе ные между элементами сравнения 6 и 7 S входами регуляторов тока якоря 8 и магнитного потока 9 два звена с регулируемым ограничением 16 и 17, вход регулирования ограниче,ния первого из которых через первый нелинейный элемент 13 подключен к выходу датчика 11 тока якоря, а вход регулирования ограничения второго звена 17 через второй нелинейный элемент 14 и блок выделения модуля 15 подключен к. выходу датчика 12 магнитного потока Ф.. На фиг. 2 показаны графики 18, 19, 2О изменения во времени тока якоря 3 , магнитного потока Ф и момента двига- теля М при реверсе момента. Для сравнения там же пунктиром приведен график 21 изменения момента двигателя при линейном изменении тока якоря и магнитного потока, причем момент в этом случае изменяется пропорционально квадрату времени. Устройство работает следующим образом. .. Пропорционально-интегральные регуляторы тока якоря 8 и магнитного потока 9 обеспечивают компенсацию величин больших постоянных времени, а передаточные функции разомкнутых контуров .регулирования этих величин практически соответствуют интегрирующим звеньям (с. точностьк) до малых некомпенсируемых постоянных величин). На входы этих звеньев подаются выходные напряжения звеньев 16 и 17с ограничением , которые во время переходных процессов при больших рассо1 ласованиях находятся в зоне насыщения. Нелинейные элементы 13 и 14 имеют гиперболическую характеристику, вследствие чего регулируемые граничные значения выходных напряжений звеньев 16 и 17 .рпределяются зависимостями 13 - |Ф1 где KJ , KO - коэффициенты пропорциональности. Поскольку разомкнутые контуры регулирования тока якоря, и магнитного потока практически представляют собой интегрирующие звенья, их выходные величины при этом изменяются во времени следую- щим образом; t.iPn 2 где Т,,д ,Т.,р. - постоянные времени интегрирования контуров регули- рования тока якоря и маг нитного потока. Тогда изменение во времни момента М двигателя характеризуется выражение 2.С t K..t т -Т кл кп Таким образом, нелинейное изменени во времени тока и потока обеспечивает линейное изменение во времени-момента двигателя, что увеличивает плавность переходных процессов. При одинаковом времени переходного процесса максимальная скорость изменения момента в устройстве {график 20 на фиг. 2) в два раза меньше, чем в известном устройстве (график 21). Это уменьшает величину рывка и увели- чйВае-т плавность переходных процессов, а это повь1шает надежность механизма. Если же возможно сохранение максимального значения рывка, можно в два раза уменьшить время переходного процесса для момента и тем самым повысить производительность электропривода. Таким образом, в устройстве обеспечивается увеличение плавности переходных процессов, что повышает надежность и долговечность электропривода н механизма, а также повышается производительность электропривода за счет сокращения времени переходных процессов. 48 Формула изобретения Устройство для управления электроприводом постоянного тока с одковременйьгм изменением тока якоря и магнитного потока двигателя, содержащее регулятор частоты вращения и подключенные к его выходу через элементы сравнения регуляторы тока якоря и магнитного потока, а также датчики частоты вращения . тока якоря и магнитного потока, подключенные к элементам сравнения на входах соответствующих регуляторов, о т л и чающееся тем, что, с целью повышения надежности механизма путем увеличения плавности переходных процессов в него введены два нелинейных элемента, блок выделения модуля и включенные между элементами сравнения и входами регуляторов тока якоря н магнитного потока два звена .с регулируемым ограничением, вход регулирования ограничения первого из которых через первый нелинейный элемент подключен к выходу датчика тока якоря, а вход регулирования ограничения второго звена через второй нелинейный элемент и блок выделения модуля {подключен к выходу датчика мaгнитнoгй потока. Источники информации, принятые во внимание при экспертизе 1. Труды MocKoiBCKoro ордена Ленина энергетического института. Тематический сборник Автоматизированный электропривод промышленных установок . Вып. 223, М., 1975, с. 146-154. 2. ВВС -Nachpichtert/,1976, 5i5, № 4, 153-160.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом постоянного тока | 1978 |
|
SU736320A1 |
| Устройство для регулирования момента в упругой трансмиссии электропривода | 1978 |
|
SU746846A1 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Устройство для регулирования частоты вращения электропривода постоянного тока | 1977 |
|
SU731538A1 |
| Устройство для регулирования момента нагрузки в упругой механической связи электропривода | 1978 |
|
SU765960A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Регулируемый электропривод постоян-НОгО TOKA | 1977 |
|
SU817951A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |