(54) УСТРОЙСТВО ДЛЯ ЧИСТКИ ИЗЛОЖНИЦ
I
Ивоб|ретбние отоюсится к области металлургии, 1К сталвП:ла1В1Ильно1му производству и предназначено для .подготовки сталеразлиаачного COiCTaiBa под разливиу стали, а Нменно для чиспки излож;ни1Ц.
Известны устройства для механизированной чистки изложнвц, принцип действия которых торедщолагает оД)Иавремен,ную о;бработку всех стенок овнутреиней поверхности изложницы. Для этото рабочий орган устройства офор-мляют соответствующим обраЗО.М. Так как излО|Ж|НИ1ЦЫ могут И1меть различную форму попвречного сечения («руглую, прямоугольную, К1вад)ра1ти}ю и т. л.) и резко отличающиеся размеры, существует м,нол ;ес11во технических решений устройств, цель которых обеспечить обработку одним инструментом возможно более щирокого диапазона типоразмеров изложниц, при этом во всех случаях сох1раняется принцип одновременной обработки всех стенок изложницы 1.
Однако такой путь рещения проблемы приводит 1К сложным конструкциям рабочего органа, а прО|блема остается нерешенной, т. е. устройство для чистки сортовых изЛОЖйиц не гадится для чистки листовых изложниц и нао:5арот.
Наиболее близким техническим решением из из1вестных Я1вляется устройство для
1Ч1ИСТКИ изложниц, содержащее корпус и рабочий орган в в|Иде шарнирно. подвещенной на валу и подпружиненной системы рычагов с рабочим инструменто-м-щеткой 2.
Однако TaiKoe устройство также не применимо для щи|р,ск10го диапазона типоразMepoiB ИЗЛОЖ1НИЦ, все это яшляется препятствием широкому внед рению механизиро1за;:-шой чистки изложниц.
Цель изобретения - обеспечение уни10ве,рсалыно1сти устройства за счет использования его для чистки излол ниц различных ти поразмер€1в.
Это достигается тем, что система рыча15гов выполнена в виде параллелограммяого механизма, установлен1ного под углом к на1правлен,ию перемещения корпуса, при этом вал выиолнен торсионным, установлен с возможностью вращения в горизонтальной
20 плоакости и -авязащ с верхним горизонтальным рычагом параллелопраммного механизма, а на нижнем горизонтальном рычаге у 1среплены с возможностью перемещения .в плоскости параллелограммного -механизма 25 Д1ве пружины встречного действия и уста|нсвле,н рабочий инструмент с возмолсностью регулирования расстояния от точ1ки крепления верхнего рычага к валу, к тому же рабочий инструмент ипараллелограммный ме30ханизм }1стано1влены симметрично по отношению ,к MecTiy др и соединен и я верх1него рычага (К валу.
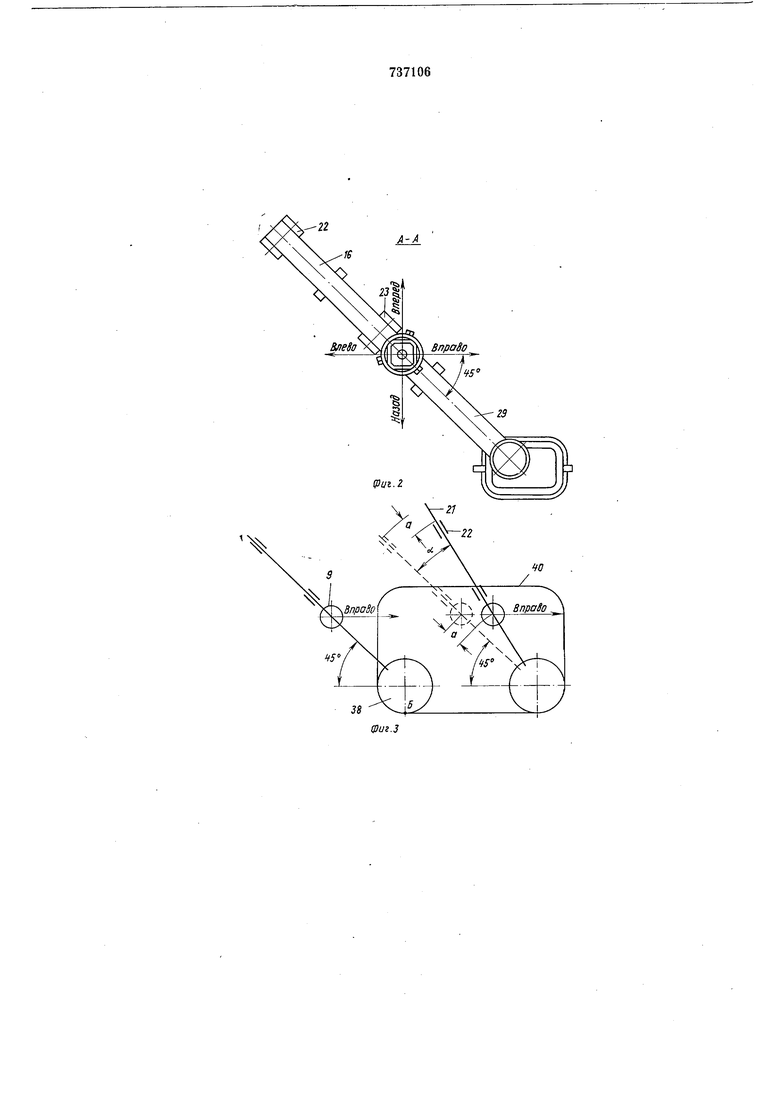
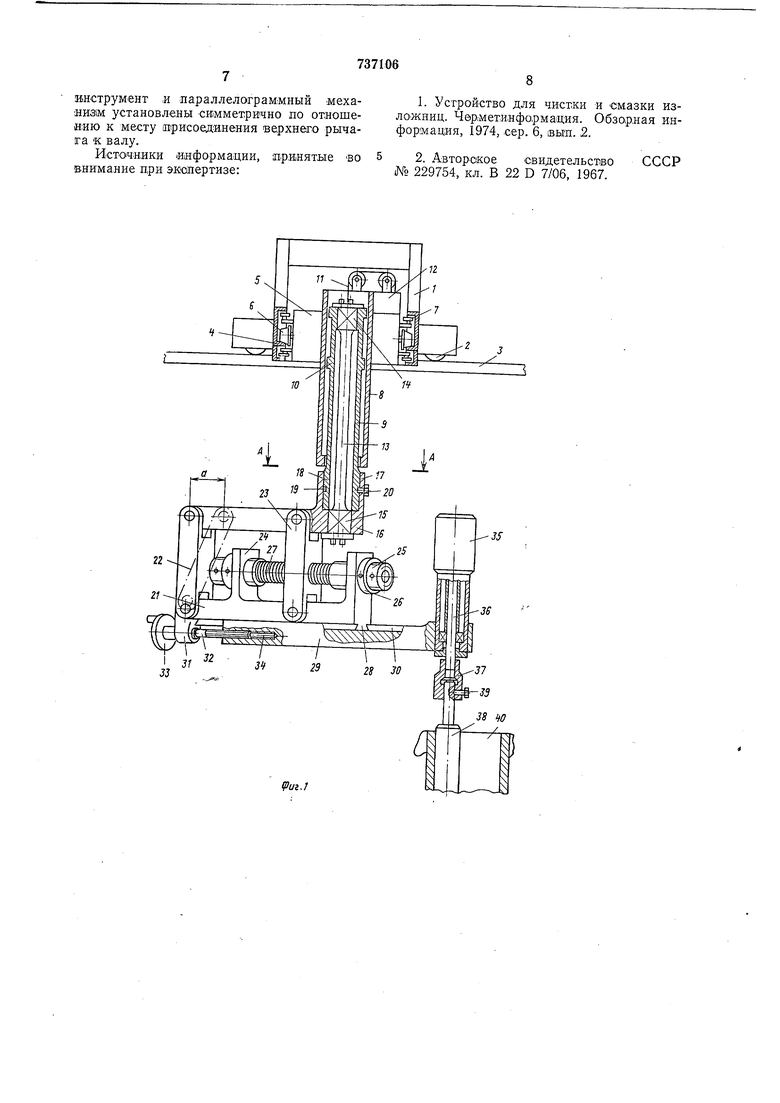
На фиг. I показано устройство, общий вид; на фиг. 2 - механизм подаеоки инструмента в 1плане; на фиг. 3 - изложница с устройством для чистки, 1поперечяое-сечение.
Устройство содержит шодвижлую краябалку /, опирающуюся п.рвводными ходовыми .колесами 2 на рельсы 3. На рельсах .хра;н-бал1ки / имеется подвижная тележка 5 с устройст1вом для OHiHCTiKH изложниц. Тележка 5 опирается на рельсы прИ1водйьгми ходовыми колесами 6. Она оснащена также боковыми хОЛО1сты1ми лЛОрными ролика.ми 7. По рельсам 3 края-балка 1 м-ожет перемещаться от одной изложницы к Д ругой по длияе состава, а тележка 5 по рельсам 4 - от изложницы к изложнице по ширине состава и от состава на одном пути к составу на другом пути. Перемещения по рельсам 3 и 4 июпользуют также для обвода инструмента чистки по (Контуру изложницы. Роли.хи 7 являются средством ориентации тележ:ки 5 в горизонтальнюй плс1акости и передают нагрузки, возотикающие в процессе чистки 1пр1и взаимодействии инструмента со ствн1кой изложницы, на «ран-балку 1. Рама тележки имеет направляющую трубу 8 некруглого сечения, жестко с нею связанную я расположенную вертикально. В трубе 5 .размещается подвижно овязаниая с нею пустотелая ;Колояна 9, имеющая возможность зерти|кальных возвр-атионпоступательных 1ле|ремещен«й в задак::1ых пределах. Ее на1лравляк)щие элементы 10 псзторяют форму 1з,н1утрен1него поперечного сечения трубы 5. Вяиз колонна 9 перемещается действием оо-бственного веса и смонтированных на ней Ззлав. Перемещение колонны BiBepx осущеспвляется тросом // при псмощи нривсда 12.
Внутри колонны 9 смоятироваи торсионный вал / /вбрхя«м койцоМ 14 жестко авязаняый с .колонной 9. На Н1иж1не1м конце 15 зала 13 жестко ук(реплен рычаг 16, подвижяо сценприроваиный втулкой 17 на цилиндричеакой по1вврх1ности 18 1колонны 9. На этой псверх1ности выполнена кольцевая проточка 19, в которую по скользящей посад1ке входят концы cTipaxoiBionHbix винтов 20, завернутых во втулки 17 рычага. В случае ПОЛОМ1КИ вала 13 эти винты и сключают иадение рычага 16 имеете со смонтирсваньчыми на нем дру;ли1ми узлами и деталя1ми.
На рычаге 16 пощвижзно омоятирован горизонтальный рычаг-ригель 2,1, соединенный с ним по-аред1ство1М З1веньев 22 и 23 так, что детали 16, 21, 23 и 23 образуют параллелограм|М1ный механизм. На рычаге 21 слева и оправа от звена 23 выооляены выступы 24, в которые завернуты вияты 25, выполняющие роль регули1р1авочно-)нажим1НЫХ. В нужнам положении они мо,гут быть заф.и1к:си|р01ваяы .контргайками 26. Между |наж1И М1ным концом каждого из винтов 25 и
з:веяом 23 установлено по винтавой пружине 27 сжатия, .которые подвергаются ре-гулиравасе в-интами 25.
Вдоль .нижней стороны ригель имеет приЗМатичоакий выступ 28 трапецеидального сечения, с по.мощью (которого рычаг 21 подвижно соединяется с ползуном 29, в паз 30 ко:торого входит выступ 28 (соединение типа «ласточкин XIBOCT). Лавый .конец рычага 21 имеет бобЫ|ШК1у 31, обращенную (ВНИЗ, в 1кото|рой -смонтирован винт 32 с .махо.вич1ком 33 ручного управления, имеющий В03|МОЖ1НО|СТЬ вращательного движения отнССйтелыно бобыэшки 31. Резьбовой ,кояец
винта 32 ввернут в резьбовое отверстие 34 |пол,з;уна. Маховичок 33 служит для осуществ л-е н ия р епу л ирО1во«1Ного in ар еМ ещени я ползуна отн-аоительно риге-ля.
На npgiBOM конце ползуна омснтирован
механизм инструманта, сэде, мото1ре|Д1}1ктор 35, вадуЩ1ий вал 36 которо;го оснащен муфтой 37, в которой крепят ннструмент-щет1ку 38 с помощью Е«нта 39. Щетка 28 в процессе работы взаимодействует с
излож;ницей 40.
Инструмент 38 и параллелограмм пара л лело-прамм1НО|ГО механизма расположены по разные стороны относительно колонны 9. Это сделано с целью уменьшения неураз нсвешенн-асти сил, действующих на колонну 9 от веса паралл-елогра.м.много механизма с HiHiCTipiyMeHTOM 38 и которые могут проявлять свое дейст1В1ие в виде изгибающего момента, приложенного к колон.яе 9
в месте присоединения к ней параллелограммного механизма. С той лте целью инструмент 38 с полз|ун.ом 29 могут быть перемещбНЫ относительно рычага 21.
Па1раллелограм1мный механизм, смонтираваиный на колонне 9, развернут в плане к направлениям перемещений .кран-балки / я тележки 5.
Работа устройства осуществляется следуюи им обра.зом.
Устройством управляет оператор, яаблю.дающий за по.ложением щетки относительно изложницы, а также (или) элементы автоматики. В нерабочем положении колонна 9 со -амонтироваяным на ней ;механизмами, iB том числе инструментом 38 для чистки, .находится в верх,нем положении, т. е. втя1нута в трубу 8 приводом 12. В таком положении нижняя точка инстр.умента 33 раюполагается выше верхней точки
ИЗЛОЖНИЦЫ 40, и устройство может беспре(пятютванно перемещаться над составо.м с изложницами 40, а инслрумент 38- быть доставлен к любой изложиице. .
Чистку изло;Ж1НИ|ЦЫ 40 ПРОИЗ.ВОДЯТ Обводом пнструманта 55 по контуру полости ее, начиная, HainpniMap, с точки Б против часовой стрелки. При этом оператор 01суще1ствляет визуальное наблюдение за процессом: положеиием инструмента 55 и состоянием очищаемой повфхеости, и производит
необходИМые манилуляции; отвод инструмента 38 или ттодвод его к О1брабатываемой стенке, перемещение по стенке лри чистке, при необходимости вертикальные возвратнопост-уиательные перемещения его, ввод и вьивод инструмента 38 из изложницы 40 и перемещение его от одной излож-ницы к другой.
До вряложения IK щетке а1кти1В1ной напрузки за1Кру1ЧИ|Ва,Н1ие вала 13 отсутст1вует и угол между линией центров колонны 9, рабочего инютпрумента 35 и иаправлвнияМи возможных перемещений колонны 9 составляет 4;5°. П;р1И приложении активной нагрузки параллело1Грамм,ный механизм с пружинами 27 и валом 13 реагируют на нагрузку и срабатывают в ,наяра;влеции и на величину, определяемые направление движения (1смещением) инструмента 58. Эти .ррабатываиия (смещения) абеопечивают плавность, мягкость взаимодействия устройства с изложницей 40 и предотвращают поломку устройства чистки.
При свободном, несиловом движении инструмента, например, вдоль нижней стороны изложницы 40 слева направо и при оилов ом конта1кте его с П1ра1В€й сте1Н1Кой ее, в углу (см. правую часть фиг. 3) инструмент 38 првк,ращает свое ноступательное Д1ВИ;жение. В то же время колонна 9, несущая на себе параллелограмМный механизм с ввструментоМ 38, продолжает двигаться в прежнем напра1влении до тех пор, пока оператор, управляющий устройством вручную, не изменит направление движения, либо это направление . не изменится автоматичбоки цод действием команд датчиков конечных положений (на че,ртеже не показаны). В результате несовпадения скоростей колонны 9 и инструмента 55 (поступательная скорость инструмента близка к нулю) изменяется их относительное положение, именно они будут расположены в конечном положении, как на фиг. 3 контурными лин1ИЯ:МИ. При этом вал 13 окажется заж ру1ченным на угол а, а рычаг 16-смещенным относительно рычага 21 на величи ну а за счет параллелогра(М1мной их связи. Возможность таких перемещений звеньев в устройстве предотвращает его ПОЛО1МКИ и смягчает взаимодействие инструмента 55 с изложницей 40. При смещении рычага 16 относительно рычага 21 звенья 22 и 23 перекашиваются и отклоняются от вертикали. При этом звено 23, П01СТОЯННО зажатое между пружинами 27, испытывает их воздействие с обеих сторон. При вертикальном положении 23 дейст1вие пружин 27 на него с обеих сторон одинаковое. Такое положение звена 25 соответствует свободному, ненагруженному состоянию инструмента 55. При наг|руженHOIM состоянии инструмента 55 действие пружины 27 на звено 25 справа больше, чем действие на него пружины 27 слева, т. е.
пружина 27 оправа стремится вернуть звено 25 .и вместе с ним весь параллелограммный механизм в нейтральное положение при упоре инструмента 3-8 в CTCHiwy изложницы 40. Как только оператор уяснит, что воздействие инструмента 55 на изложницу 40 слишком велико, он меняет направление перемещения колонны 9 на противоположное, отводя инструмент 55 от стенки изложн-ицы 40. Снятие активной нагрузки с него вызывает возврат параллелограммноро механизма в нейтральное положение цод действием правой пружины 27, воздействующей на звено 25.
Параллелограммный механизм может работать точно так же и в противоположную сторону. Это необходимо, когда, например, инструмент 55 перемещают справа налево и он в конечном счете упирается в левую стенку изложницы 40, а колонна 9 с рычагом 16 продолжают перемещаться в прежнем направлении.
Вал 13 выполняет те же функции, только он работает в горизонтальной плоскости.
Использование данной конструкции позволяет при любых рабочих движениях устройства обеспечить смещение параллелограммного механизма на величину а при закручивании вала 13 на угол а. Жест1кость устройства или его податливость обеспечивают подбором соответствующих параметров вала 13 и пружин и их регулировкой.
Устройство позволяет механизировать процесс чистки изложниц за счет использования его на изложницах различных типоразмеров.
Формула изобретения
1. Устройство для ЧИСТКИ изложниц, содержащее корпус и рабочий орган в виде шарнирно подвешенной на валу и подпружиненной системы рычагов с рабочим инструментом-щеткой, отличающееся тем, что, с целью обеспечения универсальности устройства путем использования его для чистки изложниц различных типоразмеров, система рычагов выполнена в виде параллелограммного механизма, установленного под углом к направлению перемещения корпуса, при этом вал выполнен торсионным, установлен с возможностью вращения в горизонтальной плоскости и связан с верхним горизонтальным рычагом параллелограм много механизма, а на нижнем горизонтальном рычаге укреплены с возможностью перемещения в плоскости параллелограммного механизма две пружины встречного действия, и установлен рабочий инструмент с возможностью регулирования расстояния от точки крепления верхнего рычага к валу.
2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что, с целью у1маньшения неуравновешенности сил в конструкции, рабочий
78
инструмент л параллелограммный меха-1. Устройство для чисши и смазки ,установлены ся,мметршно по отлоше-ложниц. Чер.мети«фо,рмация. О бзорлая илвию к месту присоединения верхнего рыча-формация, 1974, сер. 6, вьш. 2.
Исто икн ««формации, ат.ринятые во5 2 Авторское свидетельсшо СССР
вдимание цри экспертизе:№ 229754, кл. В 22 D 7/06, 1967.
737106
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РОТОРНОГО ТИПА для ВУЛКАНИЗАЦИИ РЕЗИНОВЫХ И АСБЕСТО-РЕЗИНОВЫХ ИЗДЕЛИЙ | 1965 |
|
SU173918A1 |
| Машина для чистки и смазки внутренней поверхности изложниц | 1938 |
|
SU54028A1 |
| Установка для очистки наружной поверхности транспортного средства | 1988 |
|
SU1639999A1 |
| Устройство для производства отделочных работ при пошивке обуви | 1939 |
|
SU68546A1 |
| Механизм чистки рам и броней | 1961 |
|
SU144151A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и ВЫГРУЗКИ ТЕРМИЧЕСКИХ ПЕЧЕЙ | 1973 |
|
SU364557A1 |
| Машина для оправки и уплотнения балластной призмы железнодорожного пути | 1958 |
|
SU118370A1 |
| Механизм чистки рам и броней коксовых печей | 1960 |
|
SU132610A1 |
| Устройство для обеспыливания текстильных изделий | 1988 |
|
SU1550016A1 |
| Поточная линия формирования колесных пар подвижного состава | 1972 |
|
SU490701A1 |