правляющий блок выполнен в виде барабанов, один из которых установлен над верхним конвейером, а другой - под нижним конвейером. Кроме того, гибкий орган выполнен в виде цепи, а направляющий блок - в виде двух звездочек, одна из которых связана с приводом вертикального перемещения конвейеров.
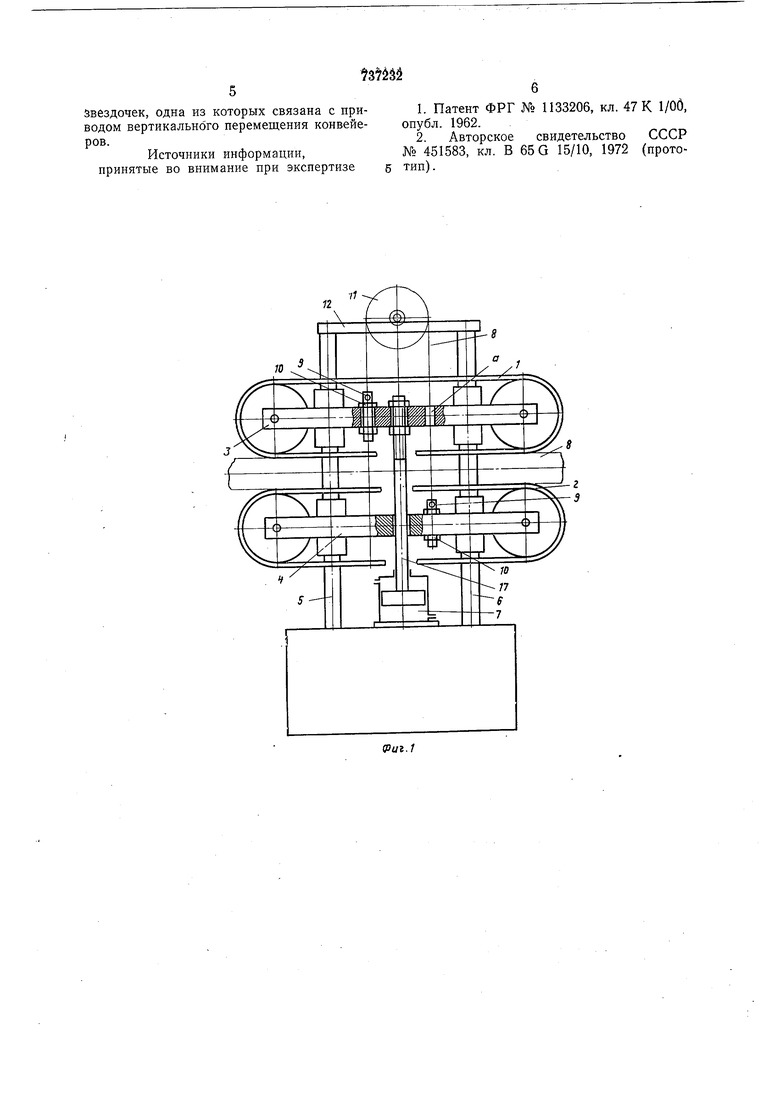
На фиг. 1-3 изображены варианты выполнения устройства.
Устройство содержит два этажнорасположенных ленточных конвейера 1 и 2, рамы 3 и 4 которых подвижно закреплены на вертикальных колоннах 5 и 6, привод 7 для вертикального перемещения конвейеров и механизм для зажима дориов.
Механизм для зажима дорнов выполнен в виде гибкого органа 8, связывающего между собой конвейер 1 и 2 и огибающего стационарный направляющий блок.
Одна ветвь гибкого органа 8 закреплена на раме 3 верхнего конвейера 1, а другая- на раме 4 нижнего конвейера 2 при помощи регулируемых тяг 9 и гаек 10.
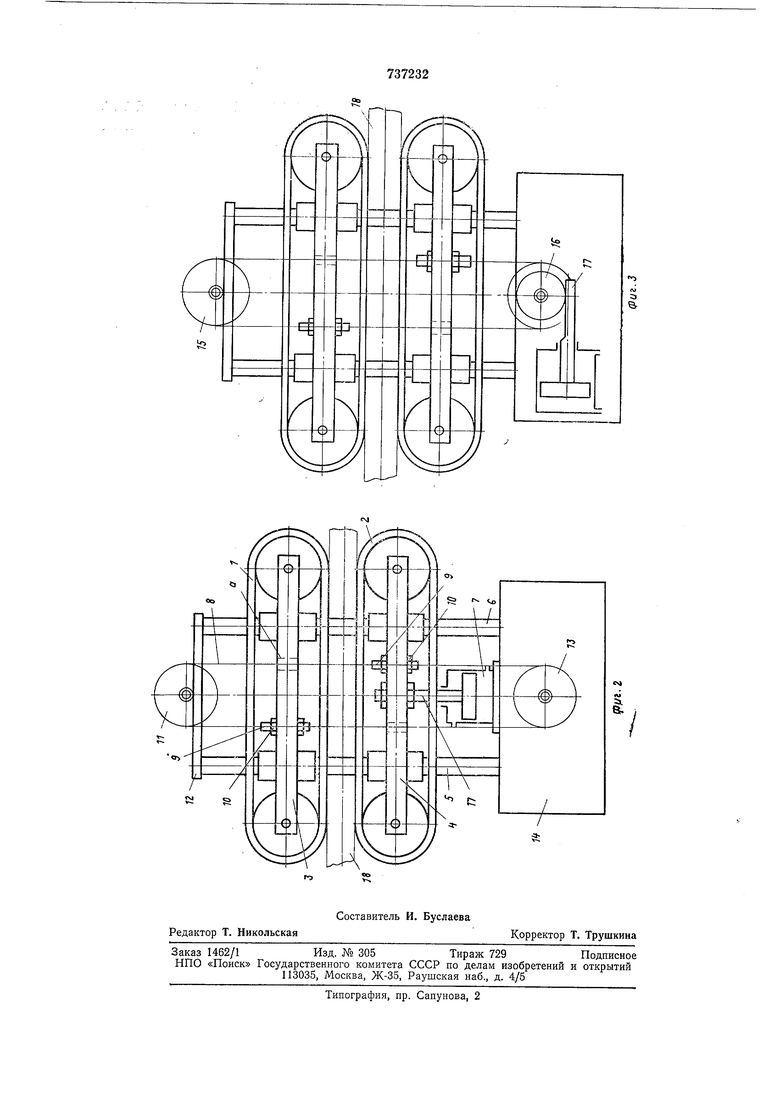
Направляющий блок может быть выполнен либо в внде одного барабана 11, стационарно установленного, над конвейерами на ненодвижной траверсе 12, либо в виде двух барабанов 11 и 13 (см. фиг. 2) соответственно один из которых стационарно установлен над конвейерами на траверсе 12, а другой - под конвейерами на станине 14.
Направляющий орган может быть выполнен также и в виде двух звездочек 15 и 16 {см. фнг. 3). Звездочка 15 является ведомой и расположена над конвейерами 1 и 2, а звездочка 16 - ведущей, расположеиа под конвейерами.
В первом случае гибкий орган 8 закреплен на рамах 3 и 4 своими концами (фиг. 1). В двух других случаях гибкий орган выполнен бесконечным (фиг. 2 и 3), причем в третьем случае гибкий орган 8 выполнен кроме того, в виде цепи.
Для свободного прохода ветви гибкого органа 8 сквозь рамы Зи 4 в последних выполнены отверстия а.
Привод 7 выполнен в внде силового цилиндра, щток 17 которого в первом варианте (фиг. 1) связан с рамой 3 верхнего конвейера 1. Во втором (фиг. 2) варианте щток 17 может быть связан либо с рамой 3 верхнего конвейера, либо с рамой 4 нижнего конвейера. В третьем варианте устройства (фиг. 3) щток 17 выполнен в виде рейки, взаимодействующей со звездочкой 16.
Работает устройство следующим образом.
Перед нуском устройства производят регулировку оси дорна 18 относительно оси оборочной мащины (на фигурах не показано) путем изменения длины ветвей гибкого органа тягами 9 и гайками 10.
При изменении диаметра дорна 18 не требуется дополнительной регулировки положения конвейера 1 и 2 относительно оси сборочной мащины, так как перемещение
будет всегда симметрично относительно первоначально установленной оси.
Затем производят зажим дорна. Для этого включают привод 7, щток 17 которого перемещает связапный с ним конвейер
1 или 2 по направлению к дорну, а соответственно другой конвейер нод действием гибкого органа 8 перемещается синхронно с первым. При этом обеспечивается зажим дорна любого диаметра с одинаковым усилием. При включении привода (на фигурах
не показано) конвейеров ленты начинают
движение, перемещая дорн к сборочной
мащине.
Регулировка усилия зажима дорна осуществляется регулировкой давления рабочей среды в силовом цилиндре.
Доиолнительная регулировка положения осп дорна относительно оси сборочной мащины, необходимая для компенсации прогиба дорнов в процессе работы устройства из-за недостаточной их жесткости, производится без прекращения работы устройства регулировкой тяг 9 гайками 10. Указаппое выполнение механизма для
зажима дорнов позволит упростить конструкцию устройства, повысить производительность и надежность его работы при перемещении дорнов различного диаметра, облегчит обслуживание устройства и повысит качество изготавливаемых рукавов.
Формула изобретения
1. Устройство для перемещения дорнов, содержащее вертикальные колонны, этажнор асположенные приводные бесконечные ленточные конвейеры с подвижно установленными на вертикальных колоннах рамами, приводы вертикального перемещения конвейеров и механизм для зажима дорнов, отличающееся тем, что, с целью повыщения производительности, облегчения обслуживания устройства в нроцессе его
работы и новыщения качества изготавливаемых рукавов, механизм для зажима дорпов выполнен в виде стационарного направляющего блока и взаимодействующего с ним гибкого органа, одна из ветвей которого связаиа с рамой верхнего конвейера, а другая - с рамой нижнего конвейера.
2.Устройство по п. 1, отличающееся тем, что гибкий орган выполнен бесконечным, а направляющий блок выполнен в виде барабанов, один из которых установлен над верхним конвейером, а другой - под нижним конвейером.
3.Устройство по п. 1, отл ич а ю щееся тем, что гибкий орган выполнен в виде цепи, а направляющий блок -в виде двух
56
звездочек, одна из которых связана с при-1. Патент ФРГ № 1133206, кл. 47 К 1/Об,
водом вертикального перемещения конвейе-опубл. 1962.
ров.2. Авторское свидетельство СССР
Источники информации,№ 451583, кл. В 65 G 15/10, 1972 (протонринятые во внимание при экспертизеg тип).
tstiis
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для разделки рыбы | 1982 |
|
SU1139396A1 |
| Устройство для транспортированияРулОНА КОНВЕйЕРНОй лЕНТы | 1979 |
|
SU823234A1 |
| Машина для формирования пакетов из цилиндрических грузов | 1978 |
|
SU738974A1 |
| Устройство для перемещения дорнов | 1982 |
|
SU1143607A1 |
| Вертикально-замкнутый тележечный конвейер | 1982 |
|
SU1077828A1 |
| Конвейер | 1979 |
|
SU885764A1 |
| Устройство для замены ленты на конвейере | 1978 |
|
SU941251A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2006 |
|
RU2312051C1 |
| УСТРОЙСТВО ДЛЯ РАЗБОРА ПАКЕТА УЛОЖЕННЫХ С ПРОКЛАДКАМИ ДОСОК | 1991 |
|
RU2031065C1 |
| УСТРОЙСТВО для МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖEЛE3^8Ь^X ДОРОГ | 1967 |
|
SU196082A1 |
12
-фн
J
|ь
Э
S
