(54) ГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МАШИНА

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая рулевая машина | 1979 |
|
SU816875A1 |
| Гидравлическая рулевая машина | 1977 |
|
SU716907A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU895810A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU893725A1 |
| Гидравлическая рулевая машина | 1977 |
|
SU763185A1 |
| Силовой гидравлический привод судового руля | 1981 |
|
SU1079545A1 |
| Нагружающее устройство для испытания гидравлических рулевых машин | 1980 |
|
SU910494A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU738944A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU768694A1 |
| Нагружающее устройство для испытанияРулЕВыХ МАшиН | 1979 |
|
SU844482A1 |
1
Изобретение относится к области судостроения, в частности к гидравлическим двух- и четырехцилиндровым рулевым машинам с силовыми исполнительными механизмами плунжерного типа с кулисной, шарнирной и реечной передачей и поршневого типа с качающимися цилиндрами, предназначенными для перекладки руля с различной угловой скоростью.
Известна гидравлическая рулевая машина, содержашая серводвигатель, распределительное и управляющее устройства, соединенные по мостовой схеме 1.
Недостатком этой р/левой машины является значительная, установочная мощность регулируемого насоса, обусловленная тем, что в диапазоне малых углов перекладки руля насос работает с наибольшей производительностью и недогружен п6 давлению.
Известна также гидравлическая рулевая машина, содержащая силовой исполнительный механизм многокамерной конструкции, гидравлически связанный с распределителей и насосом и кинематически - с румпелем 2.
Недостаток данной конструкции заклю чаетСЯТ ом7чтбйс|Т6Жзу мь1Й в известной рулевой машине распределитель обеспечивает две ступени регулирования рабочего объема силового исполнительного механизма,
5 Что в некбторь1х1:лутаях не В(змс)жн6с;ти получить требуемого быстродействия и КПД рулевой машины без увеличения установочной мощности гидромашины.
Цель настоящего изобретения - повышение быстродействия и коэффициента по0 лезного действия рулевой машины.
Поставленная цель достигается тем, что гидравлическая рулёвйя машина снабжена конечными вЫКл1бчат;ёлями и , установленным на подвижном элементе силового
J5 йй№йН1йтёЖ1Йг О ШХ1ш1 Ш ;р1 1з аШ действия с конечными выключателями, приЧШ;ра151ГрШёлйт Ж вьтбл нит;нь м управлением, в электрическую цепь которого подключены упомянутые конечные выклйпгаШгйГ- -™
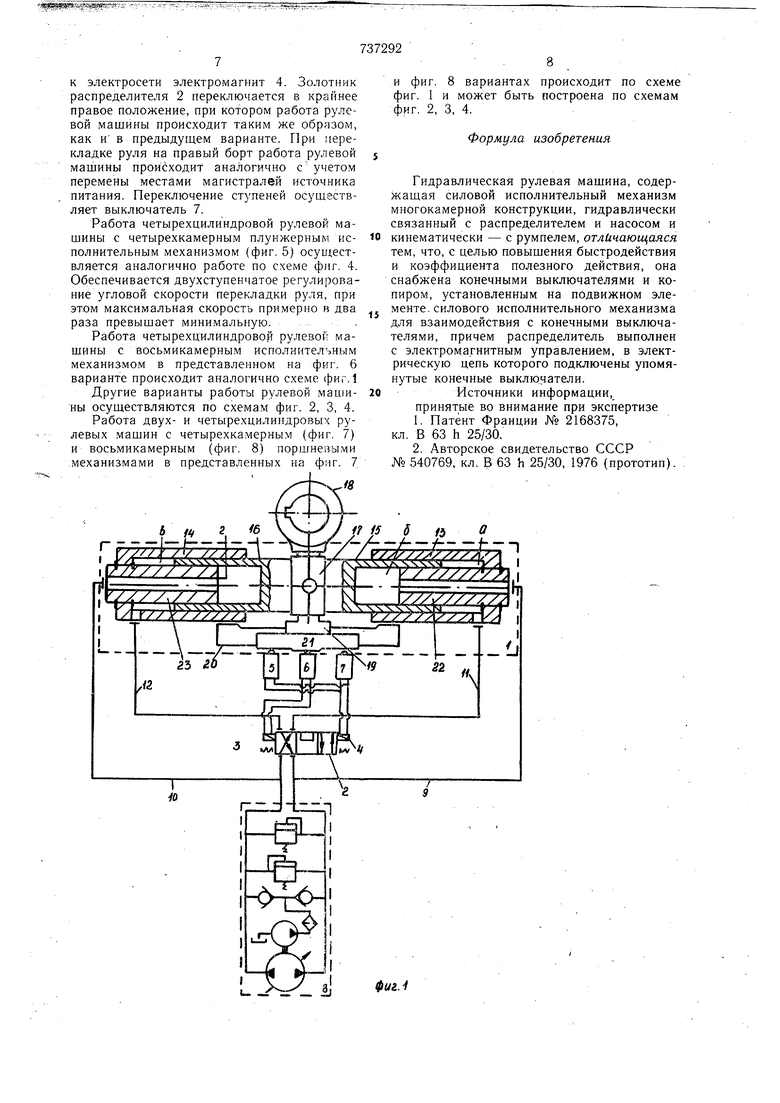
20 На фиг. 1 представлена принципиальная
схема двухцилиндровой рулевой машины
(Г чеТырёхкамерньш плунжерным исполнительньш механизмом с шарнирной передачей, насосом регулируемой производительности и трехпозиционным распределителем,. дифференциально подключающим на первой ступени регулирования рабочие камеры исполнительного механизма.
На фиг. 2 - принципиальная схема с трехпозиционным распределителем, шунтирующим рабочие камеры исполнительного Механизма на первой и второй ступенях регулирования.
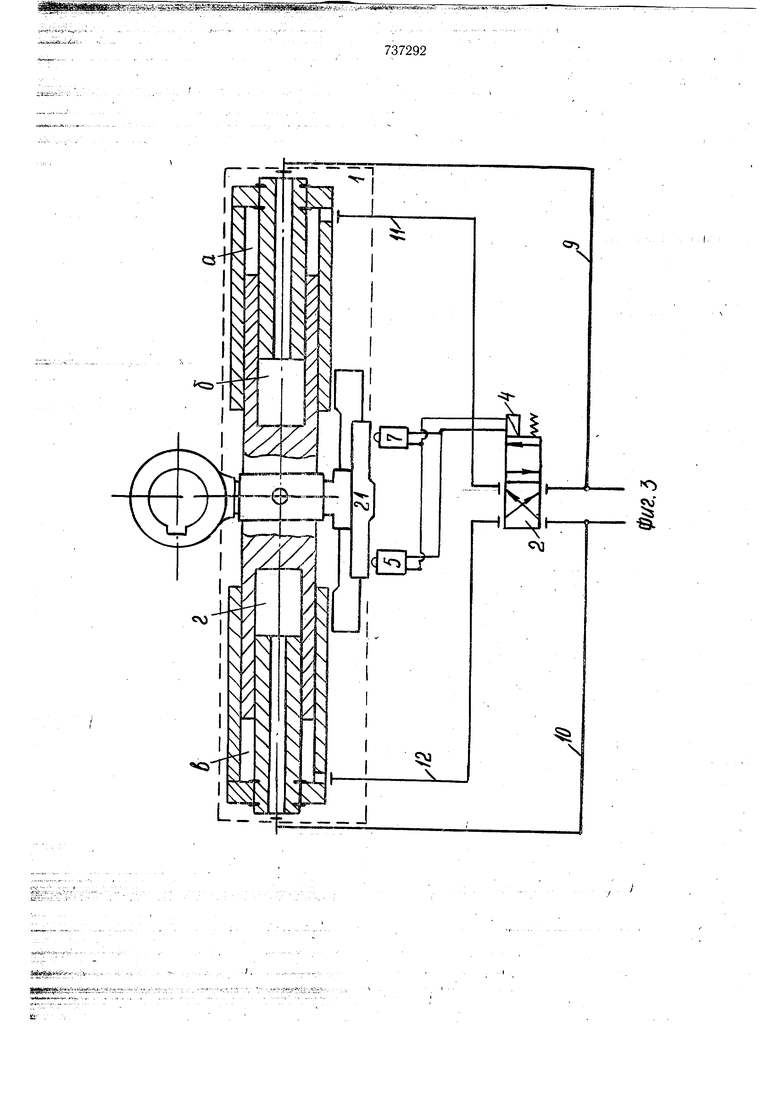
На фиг. 3 - принципиальная схема с двухпозиционным распределителем с дифференциальным подключением двух камер исполнительного механизма к нагнетающей (сливной) магистрали источника питания на первой ступени регулирования.
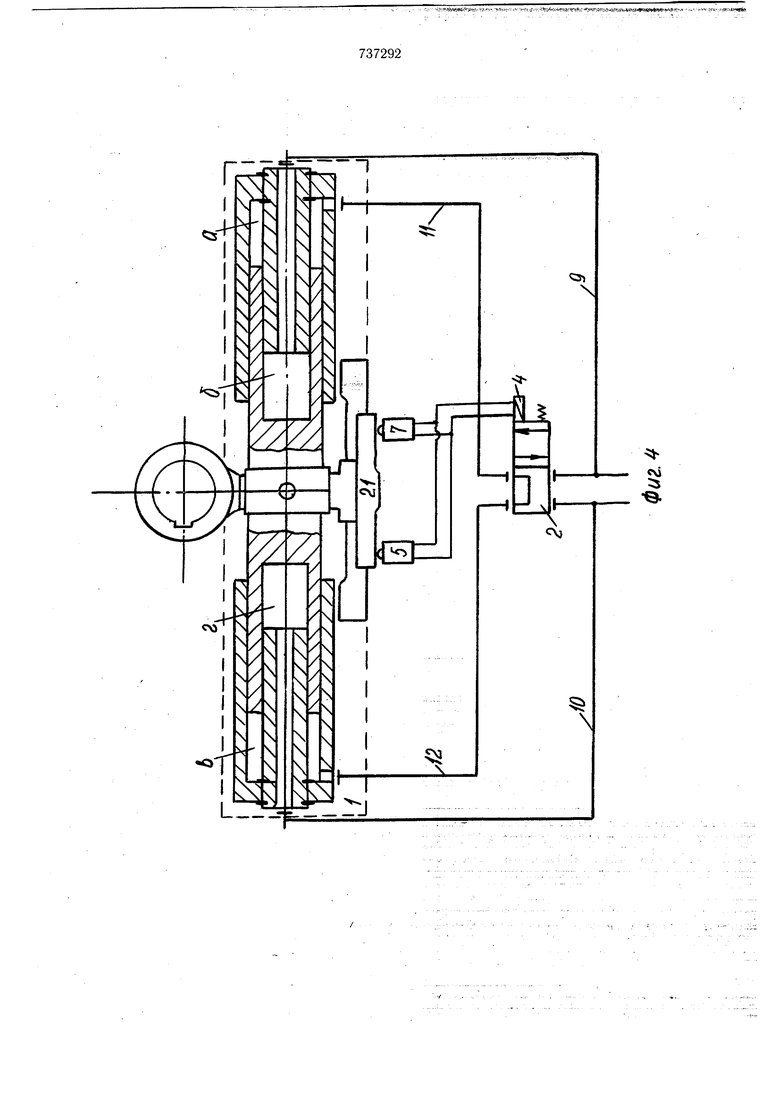
На фиг. 4 - принципиальная схема с двухпозиционным распределителем, щунтирующим две камеры исполнительного механизма на первой ступени регулирования.
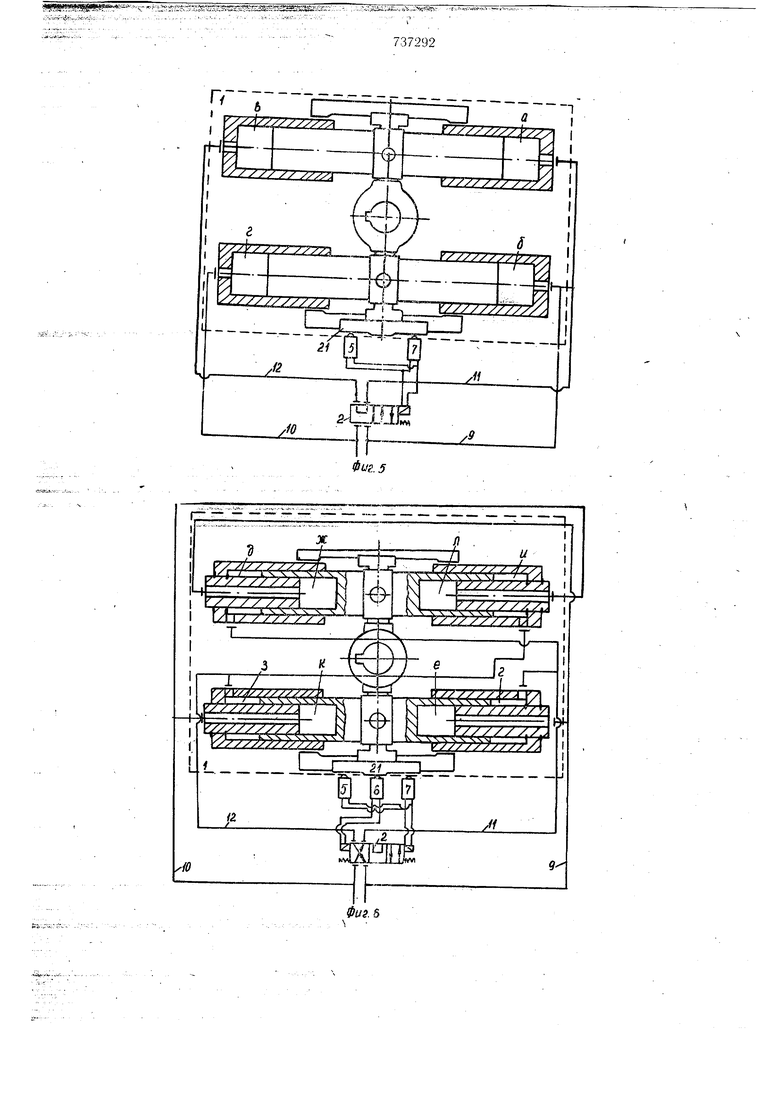
На фиг. 5 - принципиальная схема четырехцилиндровой рулевой машины с четырехкамерным плунжерным исполнительным механизмом.
На фиг. 6 - принципиальная схема четырехцилиндровой рулевой машины с восьмикамерным плунжерным исполнительным механизмом.
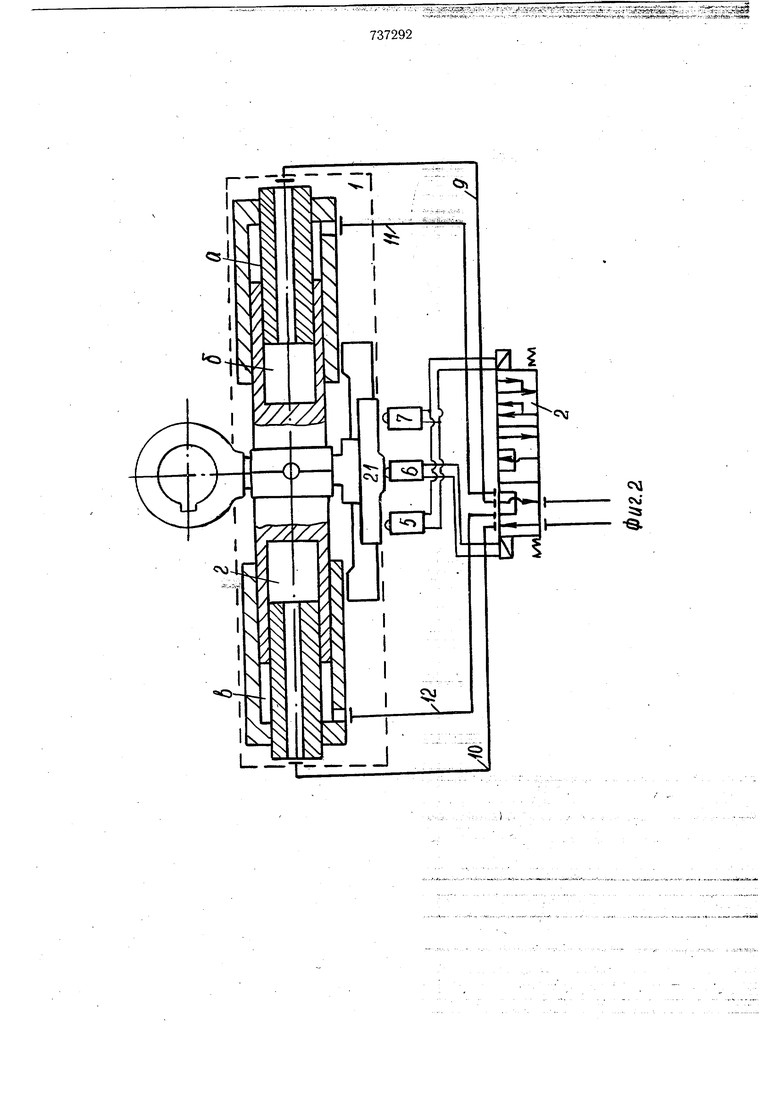
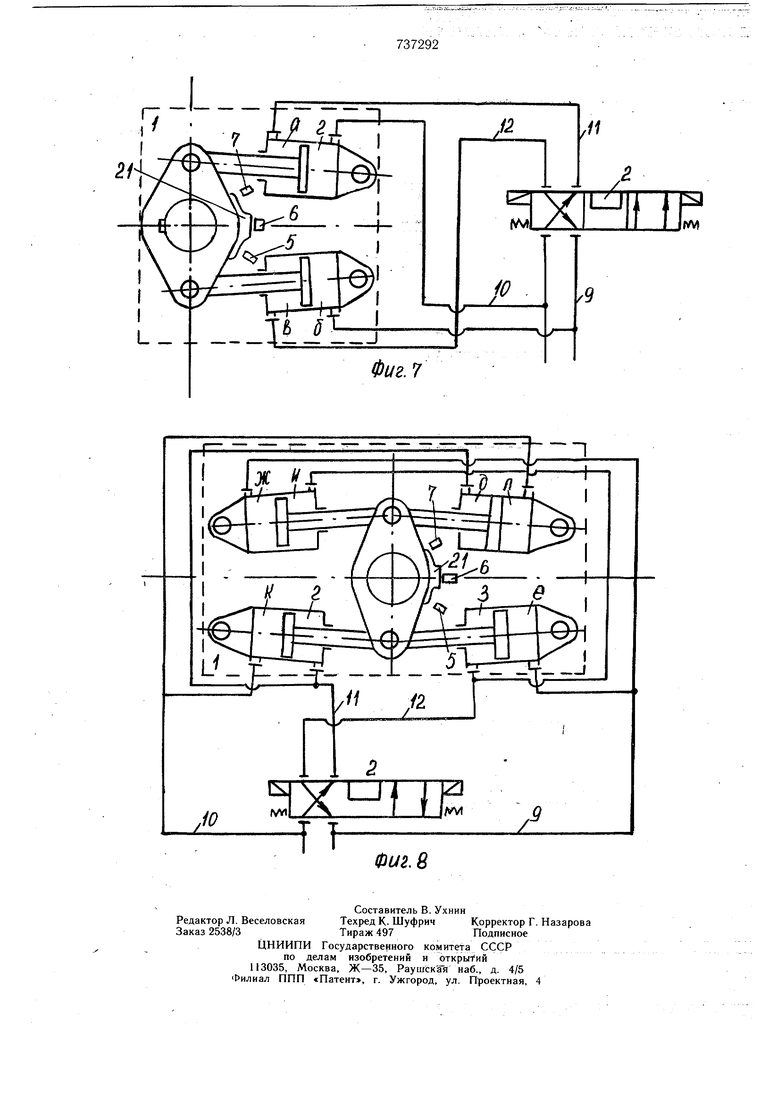
На фиг. 7 - принципиальная схема двухцилиндровой рулевой машины .с четырехкамерным поршневым исполнительным механизмом. .,
На фиг. 8 - принципиальная схема четырехцилиндровой рулевой машины с восьмикамерным поршневым исполнительным механизмом.
Гидравлическая рулевая машина содержит силовой исполнительный механизм 1, электрогидравлический распределитель 2 с электромагнитами 3, 4, конечные выключатели 5, 6, 7, источник питания 8, соединительные трубопроводы 9-12 (на фиг. 2- 8 источник питания не показан).
Двухцилиндровый четырехкамерный исполнительный механизм состоит из двух цилиндров 13, 14, подвижных плунжеров 15, 16, связанных шарниром 17 с румпелем 18, а ползуном 19 - с направляющей балкой 20. Механическая .передача между плунжерами и румпелем выполнена с кулисным механизмом или реечкой. На ползуне 19 установлен копир 21, взаимодействующий, с выключателями 5-7. Неподвижный плунжер 22, установленный в цилиндре 13, образует с плунжером 15 рабочие камеры а, Ь, а неподвижный плунжер 23, установленный в цилиндре 14, образует с плунжером 16 рабочие камеры в, г. Камеры а, б, в, г трубопроводами 9-12 и распределителем 2 соединень с источником питания 8 и между собой.
Четырехцилиндровый четырехка мерный исполнительный механиз.м состоит из четырех цилиндров и плунжеров, образующих четыре камеры, соединенные с нагнетающей (сливной) магистралью источника питания 8
трубопроводамч 9-12 и распределителем 2. Кроме того, камеры а, в шунтируются распределителем 2 между собой.
Четырехцилиндровый восьмикамерный исполнительный механизм состоит из четырех цилиндров и восьми плунжеров, образующих восемь камер г, д, е, ж, з, и, к, л, соединенных попарно трубопроводами 9-12 и распределителем 2 с источником питания 8 и между собой.
Двухцилиндровый четырехкамерный ис0 полнительный механизм состоит из двух качающихся цилиндров, которые образуют с поршнйми четыре рабочие камеры: поршневые б, г и штоковые а, в. Рабочие камеры а, б, в, г соединены с источником питания 8 и между собой.
Четырехцилиндровый восьмикамерный исполнительный механизм состоит из четырех качающихся цилиндров, которые с четырьмя поршнями образуют восемь камер г, д, е, ж, 3, и, к, л, соединенные попарно и между 0 собой и с источником питания.
Рулевая машина работает следующим образом.
Работа с двумя переключениями при трех ступенях регулирования рабочего объема ..1еханизма 1 и дифференциальном подключении его рабочих камер на первой ступени регулирования (фиг. 1).
При среднем положении руля и отсутствии подачи рабочей жидкости от источника питания 8 камеры б и 0, а также камеры а и г подключены к источнику питания 8 по дифференциальной схеме. При этом камеры а и 8, которые по рабочей площади плунжера выполнены меньше камер б и г, подключены к источнику питания через трубопроводы II и 12 и распределитель 2, а камеры б иг - непосредственно через трубопроводы 9 и 10.
При задании угла перекладки руля, например, на левый борт рабочая жидкость,
поступая от источника питания 8 в камеры в цилиндра 14 через распределитель 2 по трубопроводу 12, вызывает перемещение плунжеров 15 и 16 влево с максимальной скоростью. Одновременно, рабочая жидкость вытесняется из камеры г цилиндра 14 в камеры а цилиндра 13 через друбопроводы 10 и II и по трубопроводу 10 - в источник питания 8. На этом промежутке конечный выключатель 6 включен копиром 21 и подает напряжение на электромагнит 3, в то время,
как выключатели 5, 7 нормально разомкнуты. При достижении рулем определенного угла перекладки копир 21 выходит из взаимодействия с выключателем 6, который так же, как и выключатели 5, 7 становится нормально разомкнутым. Золотник распределителя 2
при этом пружинами вставляется в среднее положение, шунтируя полости айв друг на друга через трубопроводы 11, 12. Происходит увеличение рабочего объема исполнительного механизма 1, соответствующего второй ступени скорости перекладки руля. Рабочая жидкость, продолжая поступать в камеру б цилиндра 13, вызывает дальнейшее перемещение плунжера 15 влево, но с меньшей скоростью. Из камеры г цилиндра 14 жидкость вытесняется плунжером 16 и через трубопровод 10 поступает в источник питания 8, в то время, как из камеры в цилиндра 14 рабочая жидкость переходит через трубопровод 12, распределитель 2 и трубопровод 11 в камеру а цилиндра 13.
При дальнейшей перекладке руля влево и достижении определенного угла перекладки копир 21 воздействует на конечный выключатель 5, который подключает к электросети электромагнит 4. Золотник распределителя 2 переключается в крайнее правое положение, при котором рабочая жидкость от источника питания 8 через распределитель 2 одновременно поступает в камеры а, б цилиндра 13 в то время, как из камер в, г вытесняется плунжером 16. Происходит увеличение рабочего объема исполнительного механизма 1, соответствующего третьей ступени скорости перекладки руля. Дальнейщее перемещение плунжера происходит с минимальной скоростью.
При задании угла перекладки с левого борта к среднему положению конечные выключатели 5, 6 и рабочие камеры исполнительного механизма 1 включаются в работу в обратной последовательности.
При задании угла перекладки руля на правый борт (против часовой стрелки) работа рулевой машины происходит аналогичным образом с учетом того обстоятельства, что нагнетающая и сливная магистрали источника питания 8 меняются местами, а переключение второй ступени на третью осуществляет выключатель 7.„
Работа с двумя переключениями при трех
ступенях регулирования рабочего объема
механизма 1 и шунтированием его рабочих
камер на первой и второй ступенях регулирования (фиг. 2).
При среднем положении руля и отсутствии подачи рабочей жидкости камеры б, г, выполненные меньшей площадью, чем камеры в, а, подключены через трубопроводы 9, 10 и распределитель 2 к источнику питания, а камеры в, а шунтируются распределителем 2. При подаче рабочей жидкости в камеры б (г) происходит переналадка руля с максимальной угловой скоростью на левый (правый) борт, при этом рабочая жидкость переливается из камеры в (а) в камеру а (в) через трубопроводы 12, 11 и распределитель 2.
При достижении определенного угла перекладки выходит из взаимодействия с копиром выключатель 6, и золотник распределителя 2 выводится в среднее положение, при котором к источнику питания подключаются полости в, а, а полости б, г шунтируются. Руль перекладывается со средней скоростью до тех пор, пока копир 21 не войдет во взаимодействие с одним из выключателей 5 или 7. После этого момента золотник распределителя 2 займёт крайнее J правое положение, при котором камеры а, б (в, г) подсоединяются к нагнетающей (сливной) магистрали источника питания 8 или ййоборот. Перекладка руля происходит с максимальной скоростью.
Работа с одним переключением при двух
ступенях регулирования -и дифференциальном подключении одной или нескольких пар рабочих камер исполнительного механизма I к нагнетающей (сливной) Магистрали источника питания 8 (фиг. 3).
J При среднем положении руля камеры б, в и а, г, подключены к источнику питания 8 по дифференциальной схеме. Золотник распр1еделйтеЛя 2 пружинами удерживается в крайнем левом положении, конечные выключатели 5, 7 нормально разомкнуты. При
O заданий угла перекладки руля:; Например, на левьщ борт рабочая жидкость поступает в камеру б по трубопроводу 9, а в камеру в - по трубопроводу 12 через распределитель 2 и вызывает перемещение плунжеров
5 15, 16 с максимальной скоростью.
, , При достижении определенного угла перекладки руля копир 21 воздействует на выключатель 5, который подключает к элеКтро-. сети электромагнит 4. Золотник распредели теля вьгводится в крайнее правое положение,
0 при котором рабочая жидкость от источника питания 8 одновременно поступает в камеры а, б и сливается из камер в, г. Присходит увеличение рабочего объема механизма 1, noxyie чего движение плунжеров 15, 16 происходит с минимальной скоростью. Работа рулевой машины при перекладке на правый борт происходит аналогично с учетом перемены местами магистрали источника питания. Переключение ступеней осуществляет выключатель 7.
0 Работа с одним переключением при двух ступенях регулирования и шунтированием одной или нескольких пар рабочих камер исполнительного механизма 1 на первой ступени (фиг. 4).
-.,.„ При среднем положении руля камеры а,
б соединены друг с другом трубопровод,ами 11, 12 через распределитель 2, конечные
вьжлючатёлй 5, 7 нормально разомкнуты,
золотник распределителя 2 пружинами удерживается в крайнем левом положении. При задании угла перекладки руля, например, на левый борт рабочая жидкость от источника питания 8 поступает в камеру б, слив ается ИЗ камеры г и переливается через распределитель 2 из камеры в в камеру а.
Плунжеры 15, 16 перемещаются с макси малББОй скоростью. При достижении определенного угла перекладки руля копир 21 воздействует на выключатель 5, подключая
к электросети электромагнит 4. Золотник распределителя 2 переключается в крайнее правое положение, при котором работа рулевой машины происходит таким же образом, как и в предыдущем варианте. При перекладке руля на правый борт работа рулевой машины происходит аналогично с учетом перемены местами магистралей источника питания. Переключение ступеней осуществляет выключатель 7.
Работа четырехцилиндровой рулевой машины с четырехкамерным плунжерным исполнительным механизмом (фиг. 5) осуществляется аналогично работе по схеме фиг. 4. Обеспечивается двухступенчатое регулирование угловой скорости перекладки руля, при этом максимальная скорость примерно в два раза превышает минималь ую.
Работа четырехцилиндровой рулевой машины с восьмикамерным исполнительным механизмом в представленном на фиг. 6 варианте происходит аналогично схеме фигЛ
Другие варианты работы рулевой машины осуществляются по схемам фиг. 2, 3, 4.
Работа двух- и четырехцилиндровых рулевых .мащин с четырехкамерным (фиг. 7) и восьмикамерным (фиг. 8) поршневыми .механизмами в представленных на фиг. 7
и фиг. 8 вариантах происходит по схеме фиг. 1 и может быть построена по схемам фиг. 2, 3, 4.
Формула изобретения
Гидравлическая рулевая машина, содержащая силовой исполнительный механизм многокамерной конструкции, гидравлически связанный с распределителем и насосом и кинематически - с румпелем, отличающаяся тем, что, с целью повышения быстродействия и коэффициента полезного действия, она снабжена конечными выключателями и копиром, установленным на подвижном элементе, силового исполнительного механизма для взаимодействия с конечными выключателями, причем распределитель выполнен с электромагнитным управлением, в электрическую цепь которого подключены упомянутые конечные выключатели.
Источники информации, принятые во внимание при экспертизе
№ 540769, кл. В 63 h 25/30, 1976 (прототип).
CM
cvi
737292
737292
г/гН
г1
2i
А
/о
737292
