(54) СПОСОБ ФАЗИРОВАНИЯ ВРАЩАИЦЕГОСЯ ВАЛА . ЭЛЕКТРОДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фазирования электропривода с фазовыми дискриминаторами | 1972 |
|
SU658689A1 |
| Дискретный электропривод | 1976 |
|
SU744440A1 |
| Устройство для контроля параметров двигателя внутреннего сгорания | 1980 |
|
SU871021A1 |
| Способ управления электродвигателем | 1978 |
|
SU875564A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2649307C1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| Устройство для контроля параметров двигателя внутреннего сгорания | 1983 |
|
SU1138684A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Устройство для синхронизации опорного колебания широкополосного демодулятора | 1983 |
|
SU1185631A1 |
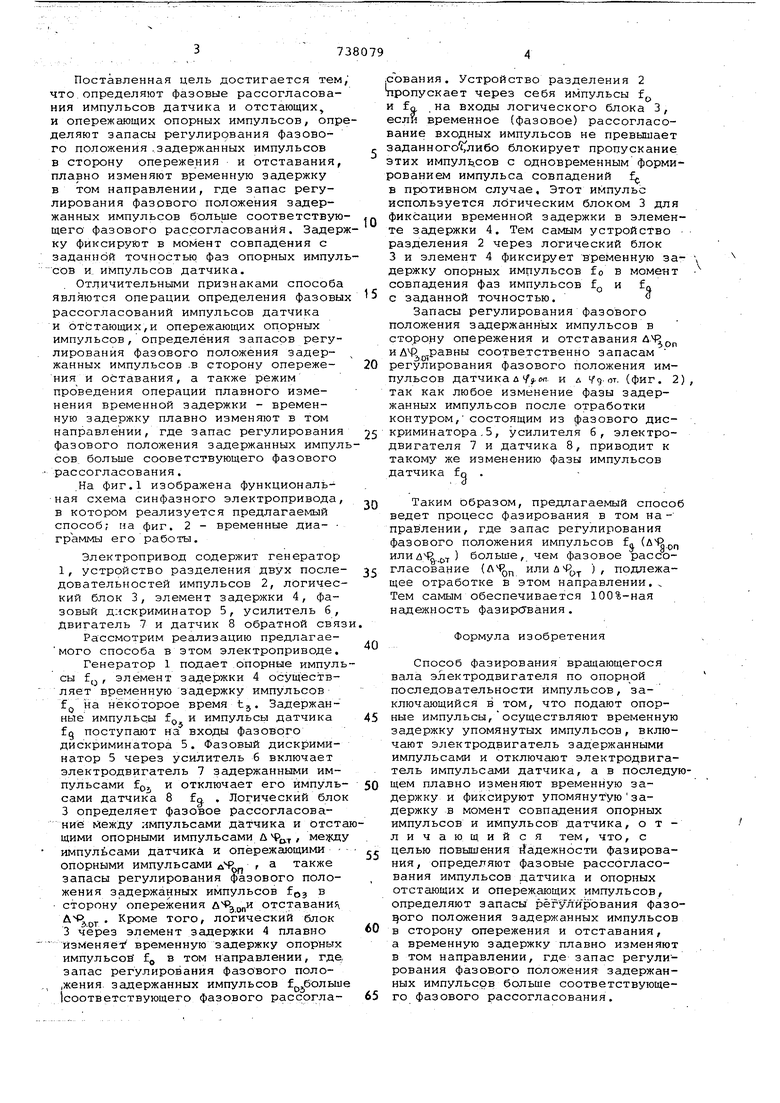
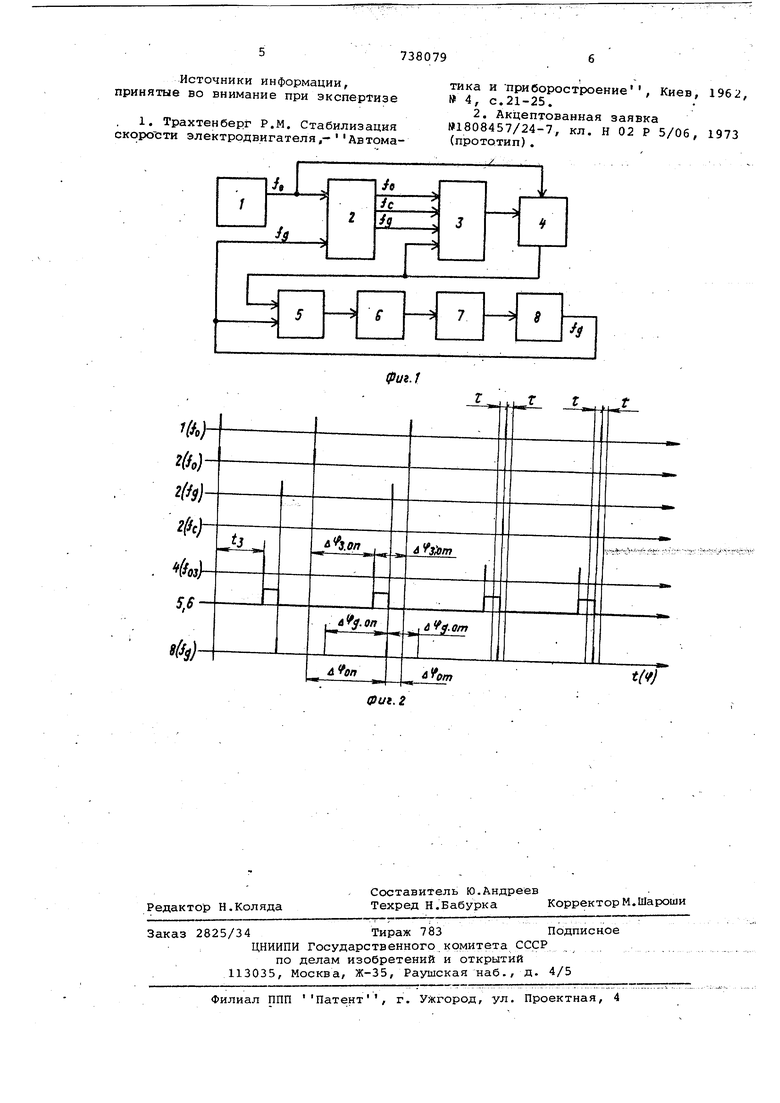
Изобретение относится к способам фазирования вращающегося вала Электр двигателя по опорной последовательности импульсов и может быть использовано в технике автоматического , в частности, в автомати управления зированном электроприводе. Известен способ фазирования вращающегося вала электродвигателя по опорной последовательности импульсов, заключающийся в том, что подаю опорные импульсы, включают электродвигатель опорнЕлми импульсами и/отключают электродвигатель импульсами датчика 1. Недостатком этого,, способа,являетс низкая точность фазирования вала электродвигателя по опорной последовательности импульсов. Этот недостаток устранен в способе фазирования вращающегося вала электродвигателя по опорной последовательности импульсов, заключающем ся в том, что подают опорные импуль сы, осуществляют временную задержку упомянутых импульсов, включают элек родвигатель задержанными импульсами отключают электродвигатель импульсами датчика, определяют знак фазового рассогласования: опорных импульсов импульсов датчика, плавно изменяют временную задержку в направлении, определяемом знаком фазового рассогласования опорных импульсов и импульсов датчика, и фиксируют задержку в момент совпадения с заданной точностью фаз опорных импульсов и импульсов датчика 2. Последний способ является наиболее близким к изобретению как по своей технической сущности, так и по достИГаёмому результату. Существеннымнедостатком этого способа является низкая надежность фазирования, связанная с тем, что известный способ не учитывает реальных запасов регулирования фазового положения импульсов датчика. В результате возможны случаи, когда выбирается такоенаправление отработки фазового рассогласования, где запас рёгулйрования фазового положения импульсое Датчика меньше подлежащего отработке в этом направлении фазового рас с6гл ас61айЙй.В этих случаях фазирование не достигается даже при исправных устройствах управления. Целью изобретения является повышение надежности фазирования. Поставленная цель достигается тем что определяют фазовые рассогласования импульсов датчика и отстающих, и опережающих опорных импульсов, опр деляют запасы регулир9вания фазового положения .задержанных импульсов в сторону опережения и отставания, плавно изменяют временную задержку в том направлении, где запас регулирования фазового положения задержанных импульсов больше соответствую щего фазового рассогласования. Задер ку фиксируют в момент совпадения с заданной точностью фаз опорных импул сов и. импульсов датчика. Отличительными признаками способа являются операции определения фазовы рассогласований импульсов датчика и Отстающих,и опережающих опорных импульсов, определения запасов регулирования фазового положения задержанных импульсов .в сторону опережения и оставания, а также режим проведения операции плавного изменения временной задержки - временную задержку плавно изменяют в том направлении, где запас регулирования фазового положения задержанных импул сов, больше сооветствующего фазового рассогласования. На фиг.1 изображена функциональная схема синфазного электропривода, в котором реализуется предлагаемый способ; на фиг. 2 - временные диа- граммы его работы. Электропривод содержит генератор 1, устройство разделения двух последовательностей импульсов 2, логичес кий блок 3, элемент задержки 4, фазовый дискриминатор 5, усилитель б. Двигатель 7 и датчик 8 обратной свя Рассмотрим реализацию предлагаемого способа в этом электроприводе. Генератор 1 подает опорные импуль сы f, элемент задержки 4 осуществляет временную задержку импульсов fjj на некоторое время t,. Задержанные импульсы fg и импульсы датчика fg поступают на входы фазового дискриминатора 5. Фазовый дискриминатор 5 через усилитель б включает электродвигатель 7 задержанными импульсами f, и отключает его ймпуль сами датчика 8 fr Логический бло 3 определяет фазовое рассогласование между импульсами датчика и отст щими опорными импульсами Д , импульсами датчика и опережающими опорными импульсами дЧ г а также запасы регулирования фазового положения задержанных импульсов fo в сторону опережения отставани5 AS . Кроме того, логический блок 3 через элемент задержки 4 плавно изменяет временную задержку опорных импульсов д в том направлении, где запас регулирования фазового поло|Жения. задержанных импульсов р,больш 1соответствующего фазового рассоглаЪвания. Устройство разделения 2 пропускает через себя импульсы f и fn, .на входы логического блока 3, если временное (фазовое) рассогласование входных импульсов не превышает заданного1 либо блокирует пропускание этих импуль,сов с одновременным формиованием импульса совпадений f, в противном случае. Этот импульс используется лбгическим блоком 3 для фиксации временной задержки в элементе задержки 4. Тем самым устройство разделения 2 через логический блок 3 и элемент 4 фиксирует временную за- держку опорных импульсов fo в момент совпадения фаз импульсов fg и f с заданной точностью. Запасы регулирования фазового положения задержанных импульсов в сторону опережения и отставания , иДЧ Р равны соответственно запасам регулирования фазового положения импульсов датчика д /}. иг, и л /д-от. (фиг. 2), так как любое изменение фазы задержанных импульсов после отработки контуром, состоящим из фазового дискриминатора ,5 , усилителя б, электродвигателя 7 и датчика 8, приводит к такому же изменению фазы импульсов датчика fq . i 3 Таким образом, предлагаемый способ ведет процесс фазирования в том направлении, где запас регулирования фазового положения импульсов fn (, илийЧ,т.) больше, чем фазовое рассогласование ( или д ) , подлежащее отработке в этом направлении,. Тем самым обеспечивается 100%-ная надежность фазирсУвания . Формула изобретения Способ фазирования вращающегося вала электродвигателя по опорной последовательности импульсов, заключающийся в том, что подают опорные импульсы,осуществляют временную задержку упомянутых импульсов, включают электродвигатель задержанными импульсами и отключают электродвигатель импульсами датчика, а в последующем плавно изменяют временную задержку и фиксируют упомянутуюзадержку в момент совпадения опорных импульсов и импульсов датчика, отличающий ся тем, что, с целью Повышения Надежности фазирования, определяют фазовые рассогласования импульсов датчика и опорных отстающих и опережающих импульсов, определяют запасы рёгулйрования фазо ого положения задержанных импульсов в сторону опережения и отставания, а временную задержку плавно изменяют в том направлении, где запас регулирования фазового положения- задержанных импульсов больше соответствующего фазового рассогласования.
Источники информации, принятые во внимание при экспертизе
