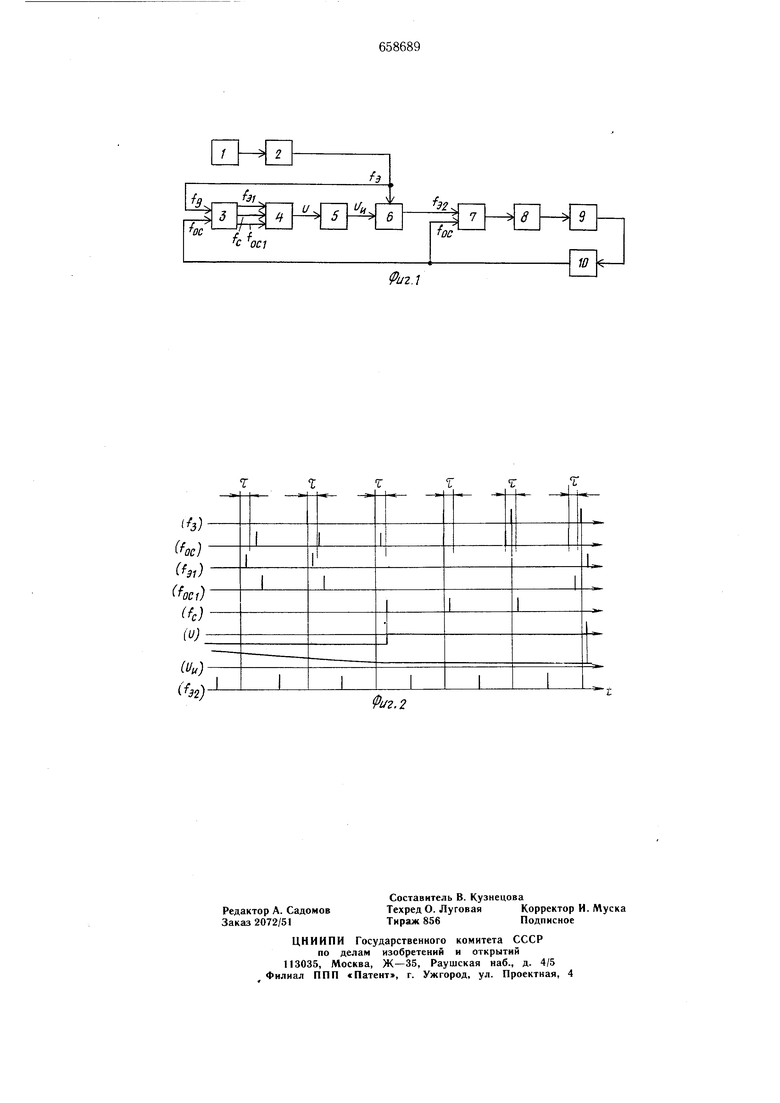
На фиг. 1 изображена функциональная схема системы синфазного вращения, в которой реализуется способ; на фиг. 2 - временные диаграммы работы atofi системы.
Система содержит ведущий двигатель 1, датчик частоты вращения ведущего двигателя 2, устройство разделения двух последовательностей импульсов 3, релейный элемент 4, интегратор 5, эле.мент задержки 6, а также фазовый дискриминатор 7, усилитель 8, ведомый двигатель 9 и датчик обратной связи 10, составляющие ведомый электропривод.
Рассмотрим реализацию предлагаемого способа в этой системе.
Цикл ее работы начинается с момента выдачи датчиков обратной связи 10 импульса foe (фиг. 2). При этом фазовый дискриминатор 7 через усилитель 8 отключает питание от ведомого двигателя 9. Одновременно устройство разделения 3 определяет наличие вре.менного (фазового) рассогласования импульсов Ь и foe, превьпиающего заданные предеды.
Если интервал времени между этими импульсами больще, чем заданное г, устройство разделения 3 формирует импульсы fji и fiPc , сохраняющие фазовое соотнощение исходных импульсов fj и f 3rf либо - в противном случае - формирует импульс частоты f. Релейный элемент 4 регистрирует знак фазового рассогласования импульсов f, и f, (fg и foe), в данном цикле и выдает стабильный сигнал V, знак которого соответствует знаку фазового рассогласования этих импульсов или, если поступил импульс fg, выдает сигнал V 0. Интегратор 5 интегрирует стабильный сигнал V, если V О и запоминает ранее накопленное значение интеграла, если V - 0. Элемент задержки 6 обеспечивает задержку импульса на время, пропорциональное текуще.му значению интеграла Vn (задержанный импульс обозначен fja).
Фазовый дискриминатор 7 через усилитель 8 подает питание на двигатель 9 в момент поступления на дискриминатор импульса IPZ- Далее процесс повторяется.
Если, например, импульсы частоты fc отстают по фазе от импульсов частоты f, и интервал времени между эти.ми импульсами превыщает -с, релейный элемент 4 подает на интегратор 5 стабильный отрицательный сигнал (V 0), интегратор 5 плавно уменьшает задержку импульсов fg в элементе задержки 6. Изменение фазы эталонного сигнала ведомого электропривода приводит, очевидно, к плавному изменению фазы сигнала foe, с датчика обратной связи в направлении уменьщения фазового рассогласования импульсов, и этот процесс продолжается до тех пор, пока временной интервал между
импульсами 1 и ioe. не станет меньще г, после чего релейный элемент 4 подает на интегратор 5 нулевой сигнал (V 0). Фаза импульсов fgs и foe в этом случае фиксируется и достигается синфазность вращения двигателей 1 и 9 с ощибкой, определяемой соотношением.
,(2)
гдеЯ - угловая скорость вращения двигателей системы.
Очевидно, что соответствующим выбором г всегда можно обеспечить выполнение неравенства.
Д фа Д pi(3)
Таким образо.м, использование способа позволяет повысить точность фазирования электроприводов с фазовыми дискриминаторами, не увеличивая число меток датчиков частоты вращения фазируемых двигателей.
Формула изобретения
Способ фазирования электроприводов с фазовыми дискриминаторами, заключающ,ийся в подаче на двигатель питания в .момент поступления импульса эталонной частоты, формируемого датчико.м частоты вращения ведущего двигателя, и отключении питания при поступлении импульса с датчика обратной связи, отличающийся тем, что, с целью повышения точности фазирования, определяют наличие фазового рассогласования импульсов эталонной частоты и импульсов обратной связи, превыщающего заданные пределы, регистрируют его знак и при наличии указанного рассогласования интегрируют дополнительный стабильный сигнал, знак которого соответствует знаку рассогласования, а при отсутствии рассогласования, превыщающего заданные пределы, запоминают ранее накопленное значение интеграла и обеспечивают задержку импульсов эталонной частоты на время, пропорциональное текущему значению интеграла.
Источники информации, принятые во внимание при экспертизе
1.Трахтенберг Р. М. Стабилизация скорости электродвигателя, журнал «Автоматика и приборостроение, Киев, 1962, № 4, с. 21-25.
2.Трахтенберг Р. М. Дискретные электроприводы высокой точности для текстильной -промыщленности. «Авто.матизированный электропривод в народном хозяйстве, Труды Всесоюзной конференции по автоматизированному электроприводу, том 4, Электропривод в химической,бумажной и легкой промыщленности и сельском хозяйстве. М., «Энергия, 1971, с. 267-268.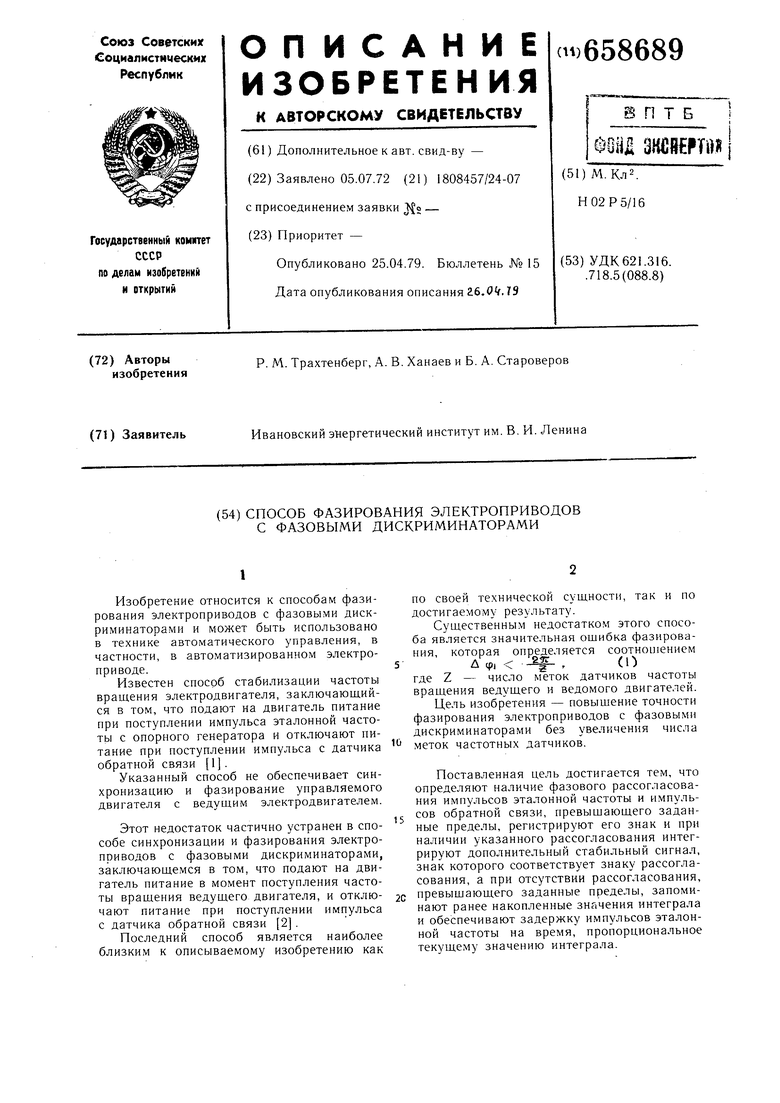
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный электропривод | 1976 |
|
SU744440A1 |
| Способ фазирования вращающегося вала электродвигателя | 1973 |
|
SU738079A1 |
| Дискретный электропривод с импульсной системой фазирования | 1976 |
|
SU723498A1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| Дискретный электропривод | 1975 |
|
SU566237A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Способ управления электродвигателем | 1978 |
|
SU875564A1 |
| Способ фазирования вращающегося вала электродвигателя | 1982 |
|
SU1106000A1 |
| Электропривод | 1987 |
|
SU1434532A1 |