(54) АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сортировки изделий | 1980 |
|
SU895559A1 |
| Автомат для контроля и сортировки тел вращения | 1977 |
|
SU716641A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Устройство для контроля и сортировки радиодеталей по электрическим параметрам | 1987 |
|
SU1613208A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2016 |
|
RU2643997C2 |
| Автоматизированная сортировочная установка для разбраковки сварочных электродов | 1990 |
|
SU1780865A1 |
| Классификатор полупроводниковых приборов | 1976 |
|
SU995160A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ, ИМЕЮЩИХ КОНИЧЕСКУЮ ЧАСТЬ | 2018 |
|
RU2698085C1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 2002 |
|
RU2218260C2 |
| Автомат для контроля и сортировки герконов | 1990 |
|
SU1749941A1 |
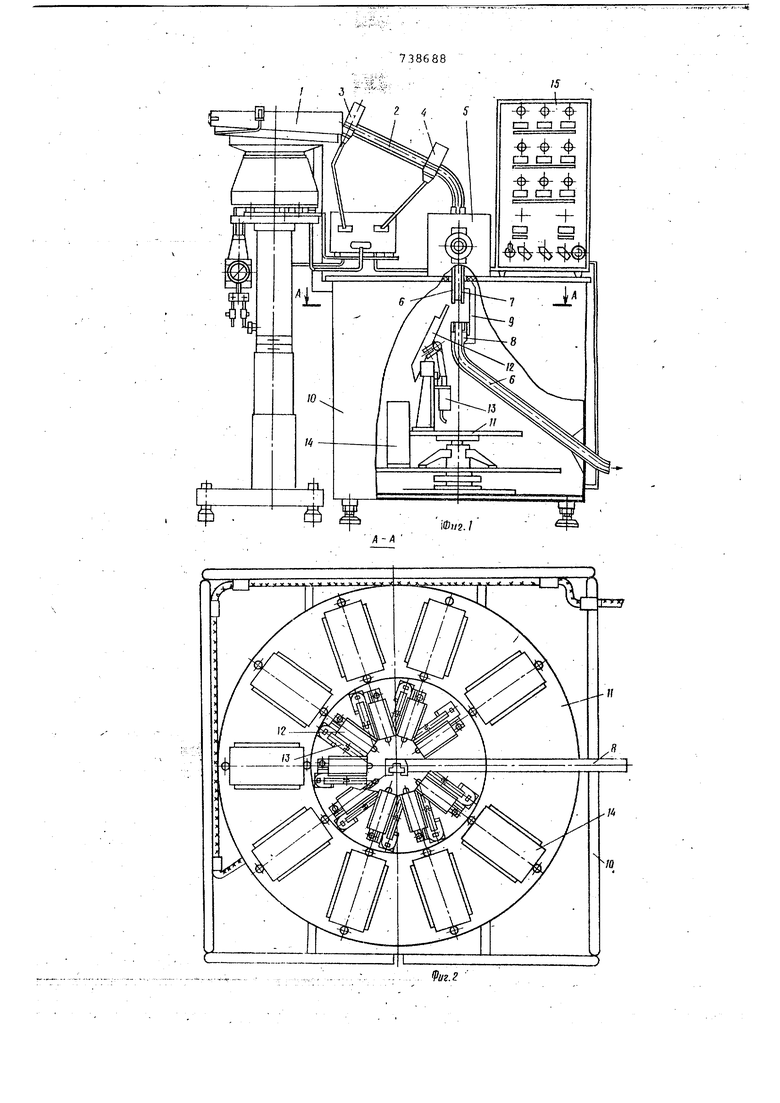
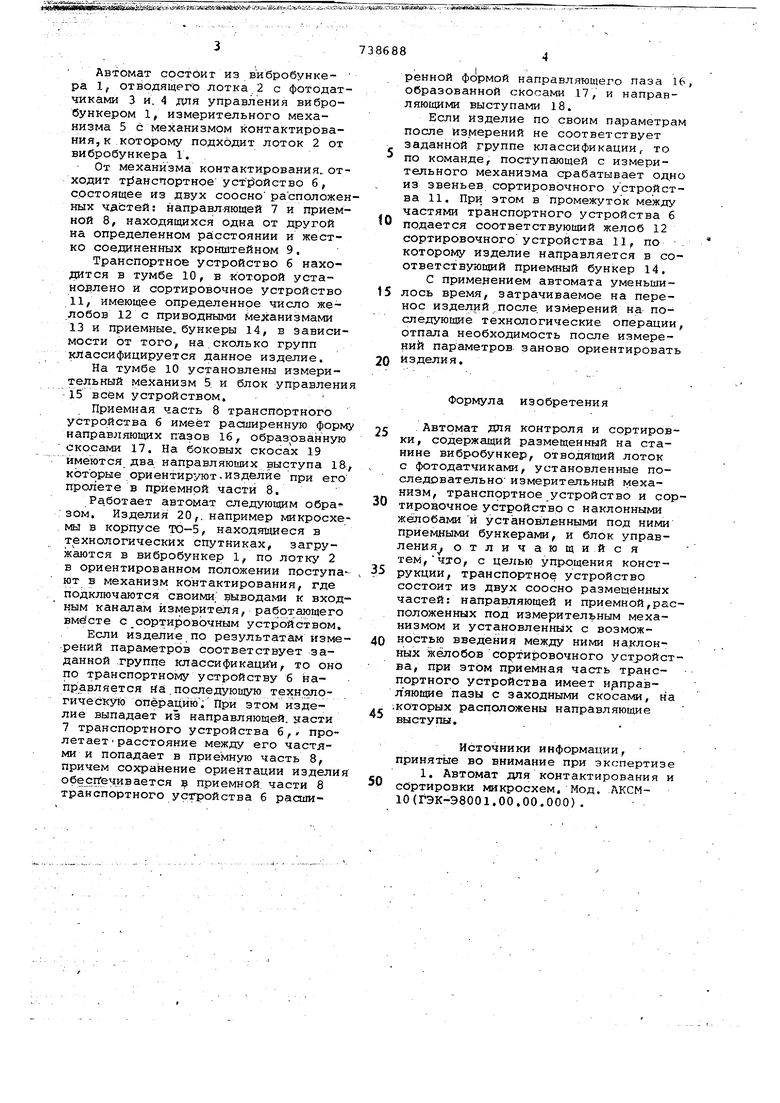
Изобретение относится к сортиро вочным устройствам и может быть использовано в автоматахдля контроля и сортировки изделий в радиои электронной промышленности для дальнейших технологических операций Известен автомат для контактиррванияи сортировки микросхем 1. Автомат содержит вибробункер, транспортное устройство, сортировочное устройство, блок управления и.приемные бункеры. Автомат работает совместно с измерителем. После измерений электрических параметров изделия выбрасываются по лотку,где их улавливают желоба сортировочног устройства и направляют в соответ- ствующие приемные бункеры. Недостатком этого автомата является то, что изделия, вылетая из :. лотка, подхватываются желобами сортировочного устройства не в ориентированном состоянии. Для того, чтобы передать изделия заданной группы классификации на другие технологические операции, необходимо устройство снабжать дополнительным ориентирующим механизмом. Целью изобретения является упрощение конструкции автомата. Указанная цель достигается тем, что в предлагаемом автомате, содержа1цем размещенный на станине вибробункер, ОТВОДЯ1ЦИЙ лоток с фотодатчиками, установленные последователь но измерительный механизм, транспортное устройство и сортировочное устройство с наклонными желобами и установленными под ними приемными бункерами,, и блок управления, транспортное устройство состоит из двух соосных частей: направляющей и приемной, расположенных под измерительным механизмом и установленных с возможностью введения между ними наклонных желобов сортировочного устройства, при этом приемная часть транспортного устройства имеет направляющие пазы с заходными скосами, на которых расположены направляющие выступы. На фиг, 1 изображен общий вид устройства; на фиг. 2 - разрез А-А фиг« 1; на фиг. 3 - приемная часть транспортного устройства в трех проекциях и сечение Б-Б.
Автомат состоит из вибробунке- pa 1, отводящего лотка 2 с фотодатчиками 3 и. 4 для управления вибробункером 1, измерительного механизма 5 с механизмом контактирования, к которому подходит лоток 2 от вибробункера 1,
От механизма контактирования, отходит ТЕ5анспортное уст ойство б, состоящее из двух соосно расположенных чдстей: направляющей 7 и приемной 8, находящихся одна от другой на определенном расстоянии и жестко соединенных кронштейном 9,
Транспортное устройство б находится в тумбе 10, в которой установлено и сортировочное устройство 11, имеющее определенное число желобов 12 с приводными Механизмами 13 и приемные, бункеры 14, в зависимости от того, на.сколько групп классифицируется данное изделие.
На тумбе 10 установлены измерительный механизм 5 и блок управления 15 всем устройством,
Приемная часть 8 транспортного устройства б имеет расширенную форму направляющих пазов 16 образованную скосами 17, На боковых скосах 19 имеются два направляющих выступа 18:, которые ориентируют-изделие при его пролете в приемной части 8,
Работает автомат следующим обра зом. Изделия 20,, например микросхемы в корпусе , находящиеся в технологических спутниках, загружаются в вибробункер 1, по лотку 2 в ориентированном положении поступают в механизм контактирования, где подключаются своими, выводами к входным каналам измерителя, работающего вместе с сортировочным устройством.
Если изделие, по результатам iisMeрений параметров соответствует заданной .группе классификацией, то оно по транспортному устройству б направляется йа;, последующую технологическуто опёрацИк); При этом изделие выпадает из направляющей, насти 7 транспортного устройства б, пролетает расстояние между его частями и попадает в приемную часть 8, причем сохранение ориентации изделия обе сгГечивается приемной, части 8 транспортного ус-тройства б расши738688
ренной формой направляющего паза .16 образованной скосами 17, и направляющими выступами 18.
Если изделие по своим параметрам после измерений не соответствует заданной .группе классификации то по команде, поступающей с измерительного механизма срабатывает од,но из звеньев сортировочного устройства 11. При этом в промежуток между частями транспортного устройства б подается соответствующий желоб 12 сортировочного устройства 11, по которому изделие направляется в соответствующий приемный бункер 14.
С применением автомата уменьшилось время, затрачиваемое на перенос изделий после, измерений на последующие технологические операции, отпала необходимость после измерений параметров заново ориентировать Изделия,
Формула изобретения
Автомат для контроля и сортировки, содержащий размещенный на станине вибробункер, отводящий лоток с фотодатчиками, установленные последовательно измерительный механизм, транспортное устройство и сортировочное устройство с наклонными желобами и установленными под ними приемными бункерами, и блок управления отличающий с я тем,что, с целью упрощения конст5 рукции, транспортное устройство состоит из двух соосно размещенных частей: направляющей и приемной,расположенных под измерительным механизмом и установленных с возможностью введения между ними наклонных желобов сортировочного устройства, при этом приемная часть транспортного устройства имеет н правляющие пазы с заходными скосами, на ;которых расположены направляющие выступы,,
Источники информации, принятые во внимание при экспертизе 1. Автомат для контактирования и сортировки микросхем. Мод. АКСМ10(ГЭК-Э8001,00,00.000),
T. иг.2.
6-S
20
