Изобретение относится к системам автоматического регулирования и может быть использовано при проекти ровании следящих систем, имеющих ограниченный угол поворота шлходного вала. Известна следявгая система с огра ниченным углом поворота Ц, содержащая усилитель, двигатель объект регулирования и концевгда выключатели. Наиболее близкой по технической сущности к изобретению является сле дящая система, содержащая элемент сравнения, выход которого через последовательно соединенные ключе,вой модулятор, выполненный яа двух транзисторах с обмоткамиопорного напряжения между базами транзисторо усилитель, двигатель и редуктор связан с объектом регулирования, а один вход подключен к выходу задающего устройства, датчик скорости, установленный на валу двигателя, датчик обратной связи и концевые . выключатели, установленные на валу объекта регулирования, причем выход .датчика обратной связи подсоединен к другому входу элемента сравнения транзисторы ключевого модулятора подключены к обмоткам опорного напряжения через размыкающие контакты концевых вык1шчателей 2. Недостатком известной следящей системы является недоиспользование рабочего сектора системы при работе на малых скоростях, поскольку концевые выключатели выставлены из расчета подхода системы к ним с концевым , выключателем с максимальной рабочей скоростью. Целью изобретения является расширение рабочей зоны системы. Эта цель достигается тем, что в предложенную систему дополнительно введены преобразователь угол-напряжение, например сельсин, установленный на валу объекта регулирования, выпрямительный блок и элемент с регулируемой зоной нечувствительности. Выход сельсина через- выпрямительный блок подключен к управляющему входу элемента с регулируемой зоной нечувствительности, второй вход котороххэ подсоединен к выходу датчика скорости, а выход - ко входу усилителя. Наличие и подключение добавочных блоков позволяет осуществить регулируемое в зависимости от скорости подхода снсте1Щ к концевым вык аочателям пбдтормаживания, а концевые вЕлслючатели выставить непосредственно у механических упоров.
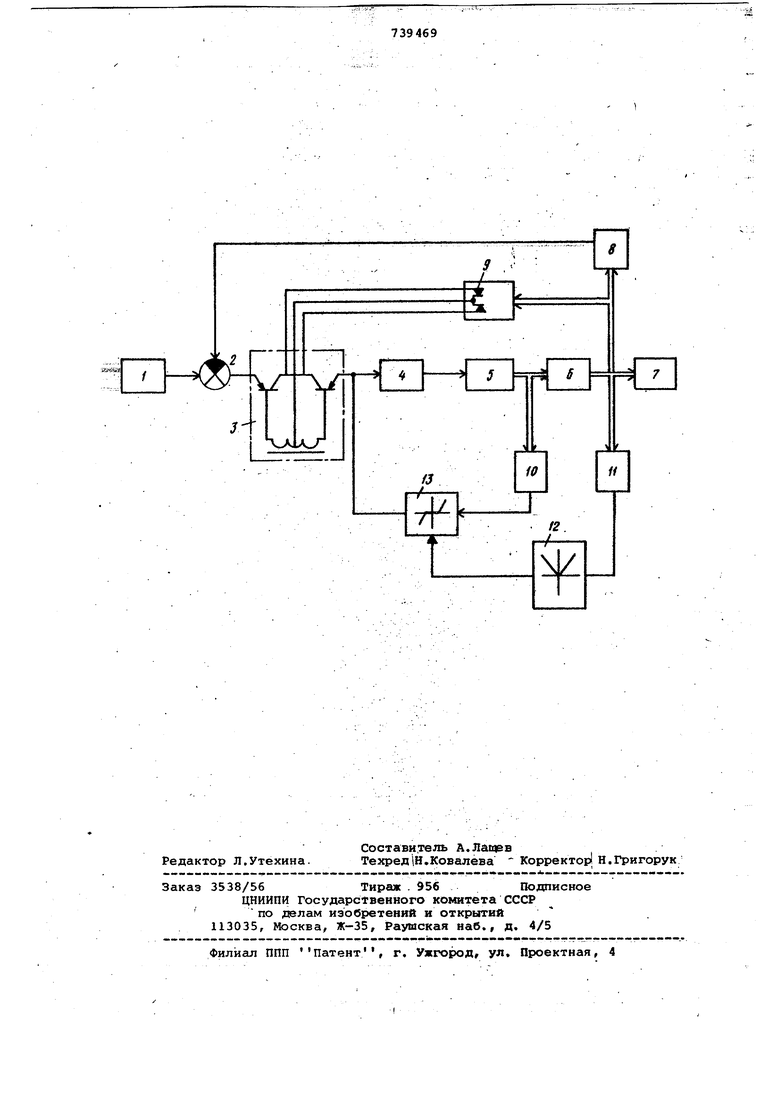
. На чертеже представлена сгтруктурная схема следящей системы.
Следящая система содержит задающее устройство 1, элемент сравнения 2, ключевой модулятор 3, усилитель 4 двигатель 5, редуктор 6, объект регулирования 7, датчик 8 обратной сёяэи концевые выключатели 9, датчик 10 скорости, преобразователь угол-напряжение. 11 (например, сельсин)j. выпрямительный блок 12, элемент 13 с регулируемой зоной нечувствительности.
Вход усилителя 4 подключен через элемент 13 к выходу датчика 10 скорости. Величина зоны не ув ствитёльно.сти определяется модулем сигнала с преобразователя 11. При равенстве сигналов с выхода датчика скорости и с выхода выпря1.штельного блока (зона нечувствительности выбрана) вход усилителя шунтируется выходньм сопротивлением датчика скорости. При этом происходит ограничение скорости следящей системы до величййы, бпредёляе.мой величиной сигнаша на выходе преобразователя, т.е. сигнал датчика скорости (а следовательно, и скорост системы) повторяют сигнал на вЫ)соле преобразователя. Преобразователь формирует сГигнал Up, пропорциональHfcffl углу торможения.
и„-(
где угол торможения, отсчитываемый от механического ynojpar
Up - скорость системы. При этом чем меньше cKOiSpcTb подхода системы к концевым выключателям тем ближе к концевому выключателю происходит ограничение её скорости и, следовательно, тем больше рабочая зона, т.е. зона в которой следящая система осуществляет обработку сигнала задаювдаго устройства с заданной точностью.
739469
. В качестве преобразователя уголнапряжение могут быть использованы датчики угла типа сельсинов, . СКВТ. При этом цена оборота их вала должна равняться удвоенному углу всей зоны работы система (зона между механическими упорами).
.ФорК1ула изобретения
Следящая система; содержащая элеlyieHT сравнения, выход которого через последовательно соеданенные ключевой модулятор, выполненный на двух транзисторах с обмотками опорного напряжения между базами транзисторов, усилитель, двигатель и редуктор связан с объектом регулирования, а один вход подключен к выходу заЛам го устройства, датчик скорости,
установленный на валу двигателя, датчик Обратной связи и концевые выключатели, Ус ановленные на валу объекта регулирования, причем выход дат.чика обратной связи подсоединен к другому входу элемента сравнения, транзисторы ключевого модулятора
подключены К обмоткам опорного напряжения через размокающие контакты концевых /выключателей, отличающая с я тем, что, с целью расширения рабочей зоны системы, в нее
дополнительно введены преобразователь угол-напряжение, например сельсин, установленный на валу объекта регулирования, выпрямительный блок и элемент с регулируемой зоной нечувствительности, при этом выход сельсина через выпрямительный блок подключен к управляющему входу элемента с регулируемой зоной нечувствительности, второй вход которого
подсоединен к выходу датчика скорости, а выход - ко входу усилителя.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №447879, кл. G 05 В 11/12, 06.12.72.
2. Авторское свидетельство СССР
№304551, кл. G 05 В 11/14, 1971 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1983 |
|
SU1120280A1 |
| Следящая система | 1972 |
|
SU447679A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1969 |
|
SU258164A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Следящая система переменного тока | 1974 |
|
SU610061A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Следящая система | 1982 |
|
SU1179264A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Стационарное устройство для воздействия низкочастотным магнитным полем на медико-биологические объекты, система управления и формирования импульсов, индуктор магнитного поля и система механического привода стационарного устройства | 2017 |
|
RU2653628C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |