(54) УСТРОЙСТВО ДЛЯ ВЫСОКОТОЧНОЙ ДИСТА НЦИОННОЙ ПЕРЕДАЧИ УГЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для связи с индукционным приемником | 1978 |
|
SU905846A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Устройство для передачи угловых перемещений | 1978 |
|
SU723643A1 |
| Следящая система | 1978 |
|
SU781758A1 |
| Устройство для контроля приемника дистанционной передачи угла | 1978 |
|
SU746678A1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
Изобретение относится к области сиетем автоматическото управления и предназначено для высокоточной дистанционной передачи угловых перемещений задающего вала. . Известны дистанционные следящие системы передачи на расстояние угла поворота некоторой командной оси pj , Однако в результирующей.ошибке таких систем большой удельный вес занимают ошибки чувствительных элементов. Вследствие этого максимальная точность таких систем с наиболее точными чувствительными элементами не превышает 90-120 угл. секунд. Наиболее близким по технической сущ ности к изобретению является устройство 1я точной дистанционной передача угла содержащее мноРопошосный датчик и основной приемник типа индуктосин, ус тановленные соответственно на задающей 1Г принимающей осях, вспомогательный приемник типа двухполюсного вращающегося транс(}юрматора. Ротор вспомогател ного приемника связан с ротором главного приемника через редуктор. Передаточное отношение редуктора равно отношению чисел пар полюсов главного и вспомогательного приемников, т. е. показателю электромеханической редукции многополюсной машинЬг; Погрешность передачи угла в рассматриваемом устройстве отсутствует только в том случае, когда коэ()(})Ш1иенты передачи (трансформации) датчика и главного приемника строго равны друг другу. Практически невозможно изготовить электрнчески машины со строгим равенством их коэффициентов трансформации. Это приводит к тому, что в системе, содержащей редуктор в линии вспомогательный приемник - принимающий вал, появляе« ется ошибка, обусловленная неравенством коэффициентЪв передачи датчика R главного приемника. Величина этой ошибки может достигать значения нескольких десятков угловык секунд.
Кроме того, сигнал, снимаемый со вспомогательного приемника, остается по величине небольшим (не превышает нескольких десятков милливольт). Это требует большого коэффициента усиления в системе, что приводит к снижению помехозащищенности линии.
Целью изобретения является повышение точности передачи угла.
Поставленная цель достигается тем, что в предложенное устройство введены операционные усилители. Ротор вспомогательнЬго приемника установлен на валу ротора основного приемника. Первые выводы вторичных обмоток датчика угла, основного и вспомогательного приемников объединены, вторые выводы одноименных вторичных обмоток датчика угла и основного приемника подключены к прямому и инвертирующему входам соот- ветственно первого и второго операционных усилителей, выходы которых соединены со вторыми выводами вторичных обмоток вспомогательного приемника.
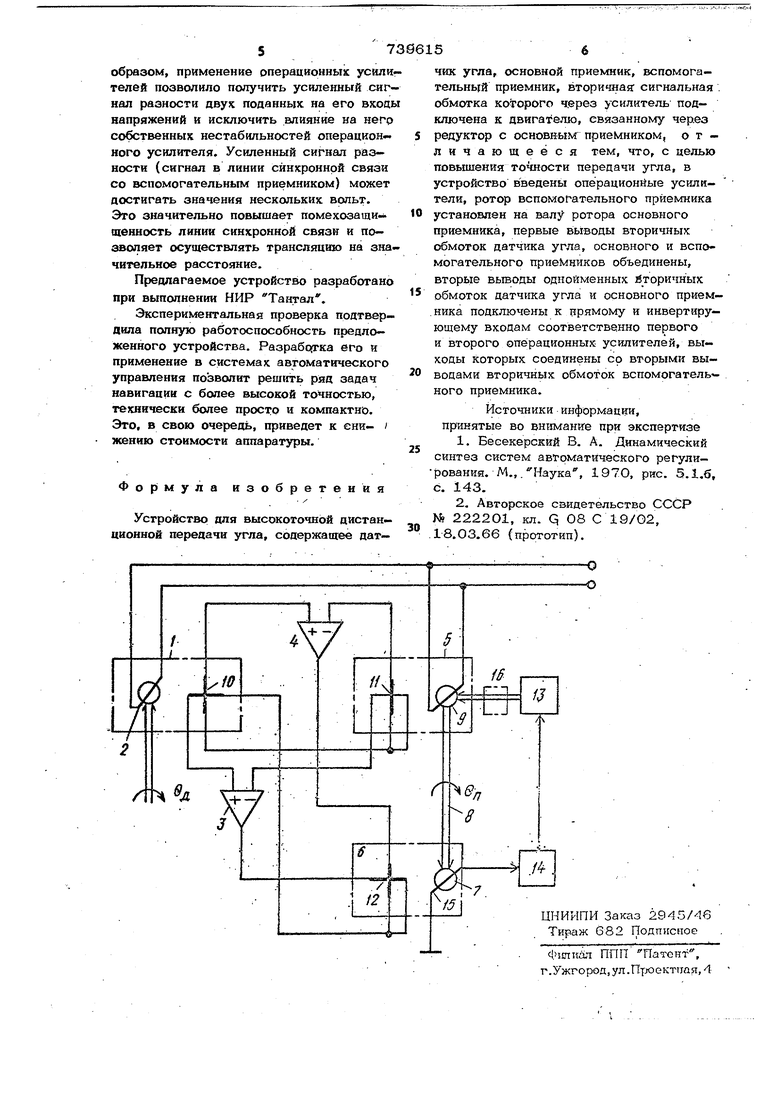
Структурная схема предлагаемого уст ройства приведена на чертеже.
Устройство содержит (многополюсный) датчик 1 угла, установленный на задающем валу 2, и первый 3 и второй 4 операционные усилители, основной 5 и вспо- могательный 6 приемники, ротор 7 вспомогательного приемника, установленный на валу 8, ротора 9 основного приемника вторичные обмотки 1О, 11, 12 соответственно датчика, основного и вспомога- тельного приемников, двигатель 13, уси литель 14, вторичную сигнальную обмот- ку 15 вспомогательного приемника 6 и редуктор 16 связи.
Устройство работает следующим образом.
Многойопюсный датчик 1 и приемник 5, установленные на валах 2 и 8 соответственно, запитаны от одного источника питания переменного тока. На прямой и инвертирующий входы усилителей 3 и 4 подключены одноименные выводы обмоток датчика 1 и. основного приемника 5 по схеме компенсации. Таким образом, если угол поворота.вала 2 равен углу поворота вала 8, т. е, 6. - Q, на прямом и инвертирующем входах усилителей 3 и 4 действуют напряжения, равч ные по величине и одинаковые по знаку. Эти соотношения сохраняются при любом угловом положении вала 2 при выполнении условия равенства в и бп Сигналы, равные по величине и фазе, поданные на прямой н инвертирующий входы операционного усилителя, усиливаются и взаимокомпеисируются, проходя один и тот же усилительный тракт. Таким об разом, результирующее напряжение на выходе (разность) равно иулк). При повороте вала 2 на некоторый угол и возникновении разности между бд и 6f , на выходе усилителей 3 и 4 появляются напряжения синусоидальной формы; величина и фаза которых зависят от величины и знака разности между 9 и ©п . Эти напряжения поступают на соответствующие обмотки 12 приемника 6, что приводит к появлению напряжения на его вторичной сигнальной обмотке 15. Это напряжение усиливается усилителем 14 следящей системы, поступает на двигатель 13, который Через редуктор связи 16 вращает вал приемника 5, приводя систему, в согласованное состояние, т. е, в положение, когда вд и 9 .
Отсутствие редуктора между вспомогательным приемником и принимающим валоК исключает основную составляющую ошибки передачи угла, обусловленную неравенством мгновенных значений передаточного отношения редуктора и показателей электрической редукции датчика и основного приемника. Это значительно повышает динамическую точность системы передачи угла. Отсутствие же редуктора мемсду приемником 6 и валом 8 дает и принципиальную возможность установить вместо двигателя следящей системы 13 и редуктора связи с принимающим валом моментный двигатель непосредственно на принимающий вал. Благодаря этому все кинематические связи могут быть исключены. В результате исключаются и все составляющие ошибок, обусловленные погрешностями Зацеплений.
Введение операционных усилителей, в линию синхронной связи позволило произвести усиление сигналов датчика и основного приемника с помощью одного и того же усилительного тракта интегральной твердотельной микросхемы;
Процесс усиления сигналов .датчика и основного приемника происходит одновременно с процессом их взаимной компей- сации при прохожденииодного и то Го же усилительного тракта. Это позволило компенсировать в разностном сигнале все собственные и изменения коэффициента усиления операционного усилителя, которые возникают в связи с изменениями условий окружающей среды. Таким 57 образом, применение операционнык усили талей позволило получить усиленный сигнал разности двух поданных на его входы напряжений и исключить влияние на негр собственных нестабильностей операционного усилителя. Усиленный сигнал разности (сигнал в линии синхронной связи со вспомогательным приемником) может достигать значения нескольких вольт. Это значительно повышает помехозащищенность линии синхронной связи и позволяет осуществлять трансляцию на зна чительное расстояние. Предлагаемое устройство разработано при выполнении НИР Тантал. Экспериментальная проверка подтвердила полную работоспособность предложенного устройства. Разрабсугка его и применение в системах автоматического управления позволит решить ряд задач навигации с более высокой точностью, технически более просто и компактно. Это, в свою очередь, приведет к они- / жению стоимости аппаратуры. изобретения Устройство для высокоточной дистанционной передачи угла, содержащее дат- 5 чик угла, основной приемник, вспомогательнь й приемник, вторичная сигнальная . обмотка которого ч:ерез усилитель подключена к двигателю, связанному через редуктор с основным приемником, отличающееся тем, что, с целью повышения точности передачи угла, в устройство введены операционные усилители, ротор вспомогательного приемника установлен на валу ротора основного приемника, первые ёьгаоды вторичных обмоток датчика угла, основного и вспомогательного приемников объединены, вторые выводы одноименных йторичных обмоток датчика угла и основного приемника подключены к прямому и инвертирующему входам соответственно первого и второго операционных усилителей, выходы которых соединены со вторыми выводами вторичных обмоток вспомогатель ного приемника. Источники информации, принятые во внт1мание при экспертизе 1.Бесекерский В. А. Динамический синтез систем автоматического регулирования. М., . Наука, 197О. рис. 5.1.6, с. 143. 2.Авторское свидетельство СССР М 2222О1, кл. q 08 С 19/02, 18.03.66 (прототип).
