(54) СПОСОБ УПРАВЛЕНИЯ ЛИНЕЙНЫМ ШАГОВЫМ.ПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2190920C1 |
| Шаговый привод | 1976 |
|
SU570132A1 |
| ВЕДОМЫЙ ДВИЖИТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИНТЕРВЕНЦИОННЫМ ХИРУРГИЧЕСКИМ РОБОТОМ | 2020 |
|
RU2763670C1 |
| Пьезоэлектрический шаговый двигатель | 1979 |
|
SU843032A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2045126C1 |
| Привод линейных перемещений | 1986 |
|
SU1404249A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2065245C1 |
| Пьезоэлектрический шаговый привод малых угловых перемещений | 1977 |
|
SU711649A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРИВОД МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU428910A1 |
| Способ управления магнитострикционным шаговым исполнительным устройством | 1988 |
|
SU1616488A1 |
Изобретение относится к электротехнике и может быть использовано при управлении линейными «наговыми приводами (ЛШП) малых перемещений в системах измерительных приборсж и устройств автоматики, а также для управления приводами малых подач в приборостроении и станкостроении, В качестве движителя в ЛШП обычно используются пьезоэлектрические, магнитострикционные преобразователи и пружины или рессоры.
Известны способы управления ЛШП малых перемещений, включающие в себя чередование зажатия и отжатия зажимов торцов движителя со сжатием и принятием движителем прежних размеров поД действием управляющего импульса .
Недостаток известных способов состоит в низкой точности обработки единичного щага.
Известен способ управления линейным шаговым приводом, содержащим два зажима, движитель, систему управления, включающий освобождение первого зажима при зафиксированном втором, подачу прямоугольного управляющего импульса на движитель, фиксацию первого зажима, освобождение второго зажима, снятие управляющего импульса с движителя, фиксацию второго зажима 2J.
Недостатком известного способа является низкая точность работы привода.
Цель изобретения состоит в повышении точности работы привода. .
Указанная цель достигается тем, что предварительно определяют участок равномерного движения зажимов, а фиксацию зажимов в процессе работы производят в конце указанного участка.
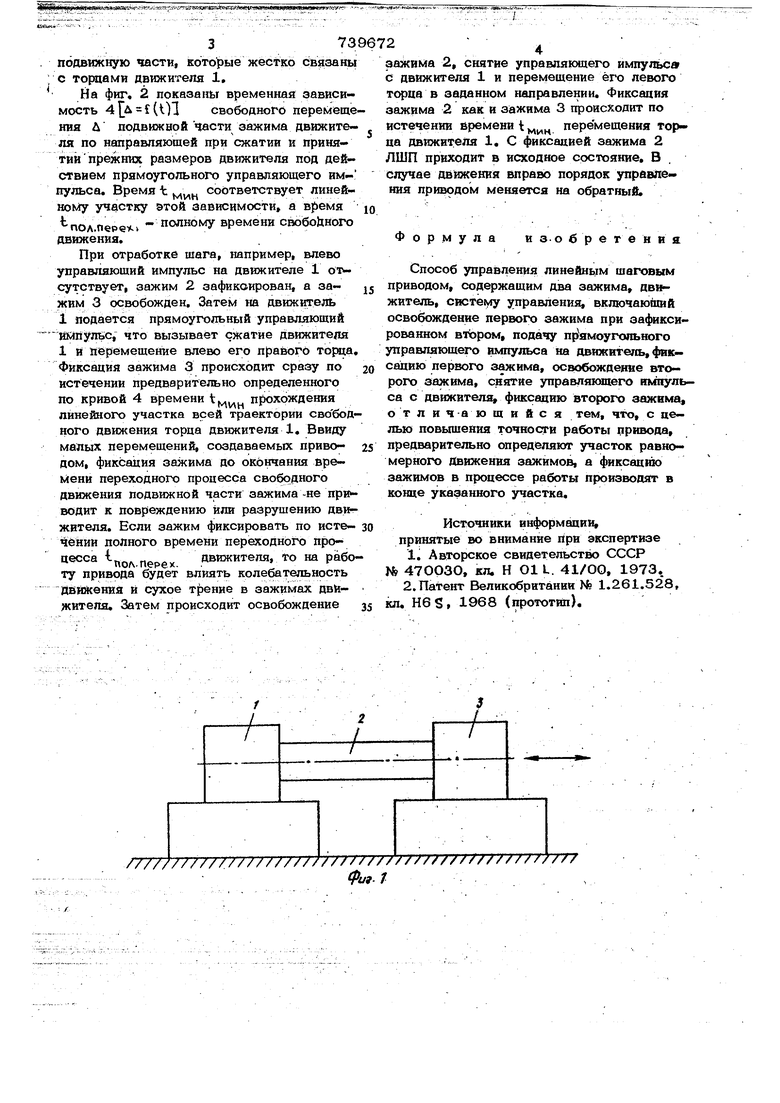
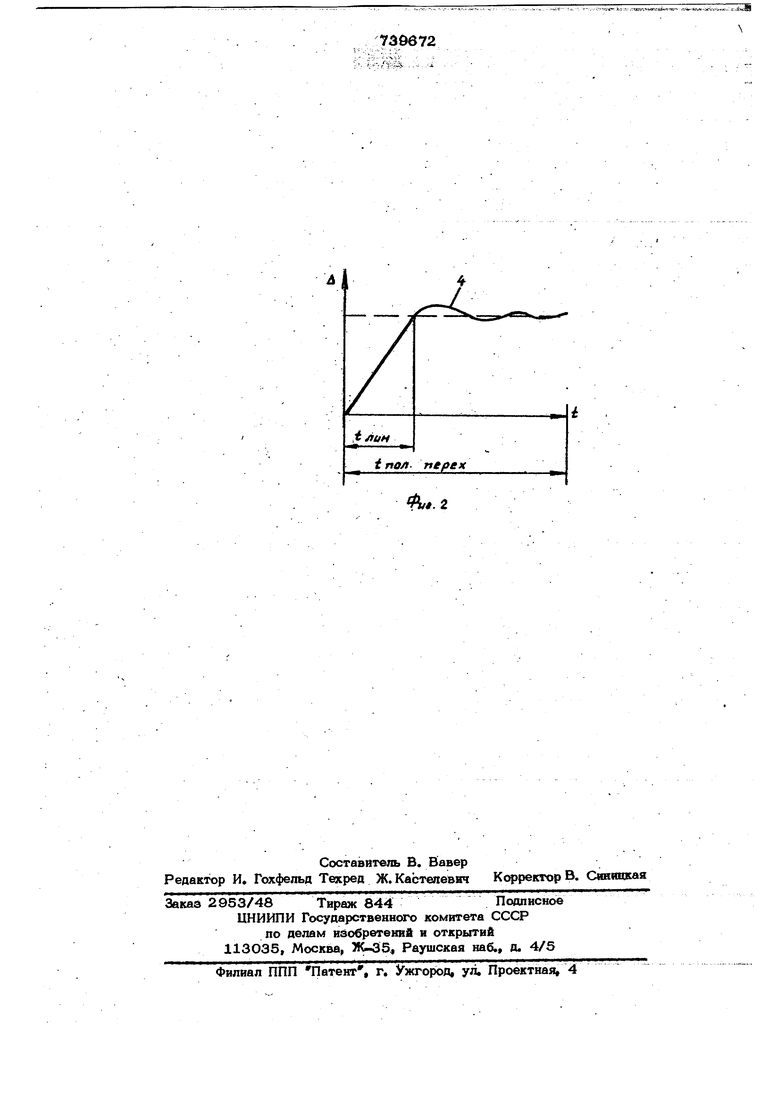
На фиг, 1 показан ЛШП, ЛШП содержит пьезоэлектрический движитель 1 и два электромагнитных зажима 2 и 3 торяцов движителя 1, плоскости контактирования которых являются одновременно направляющей поступательного перемещения. Зажимы 2 и 3 содержат неподвижную и подвижную части, которые жёстко связаны : с движителя 1, На фиг. 2 показаны временная зависимость (t)l свободного перемеще ния Л подвижной части зажима движителя по направляющей при сжатии и принятийпрежних размеров движителя под действием прямоугольного управляющего импульса. Время соответствует линейному участку этой зависимости, а время Лпол.перет движения. При отработке шага, шпример, влево управляющий импульс на движителе 1 отсутствует, зажим 2 зафикоирован, а зажим 3 освобожден. Затем на движитель 1 подается прямоугольный управляющий Шйгпульс, что вызывает сжатие движителя 1 и перемещение влево его правого Tofsia Фиксация зажима 3 происходит сразу по истечении предварительно определенного по кривой 4 времени t прохождения линейного участка всей траектории свобод- ного движения торца движителя 1. Ввиду малых перемещений, создаваемых приводом, фиксация зажима до окончания времени переходнохчэ процесса свободного движения подвижной части зажима -не при водит к повреждению Или разрущению движителя. Если зажим фиксировать по исте- чёнии полного времени переходного процесса под, пере X. движителя. То на работу привода будет влиять колебательность движения И сухое т|рение в зажимах двИжителя. Затем происходит освобождение
VT////
/7/V/////
fuf.f зажима 2, снятие управляющего импульсе с движителя 1 и перемещение его левого торца в заданном направлении. Фиксация зажима 2 как и зажима 3 происходит по истечении времени перемещения торца движителя 1. С фиксацией зажима 2 ЛШП приходит в исходное состояние, В случае движения вправо порядок управпе- ния прИЕЮдом меняется на обратный. Ф о р м у л а изобретен и я Способ управления линейным щаговым приводом, содержащим два зажима, движитель, систе «у управления, включающий освобождение первого зажима при зафиксированном BibpoM, подачу пр ямоугопьного управляющего импульса на движитель, фиксацию первого зажима, освобождение второго зажима, снятие управляющего импульса с движителе фиксацию второго зажима, отлич-ающийся тем, чго, с целью повышения точности работы привода, предварительно определяют участок равномерного Движения зажимов, а фиксацию зажимов в процессе работы произвошгт в конце указанного участка. Источники информации, пришггые во внимание при экспертизе 1. Авторское свидетельство СССР 470Q3O, кл, Н О1 L. 41/ОО, 1973,. 2. Патент Великобритании № 1.261.528, л. Н6 S , 1968 (прототип).
739672
Awii ,:L -I
