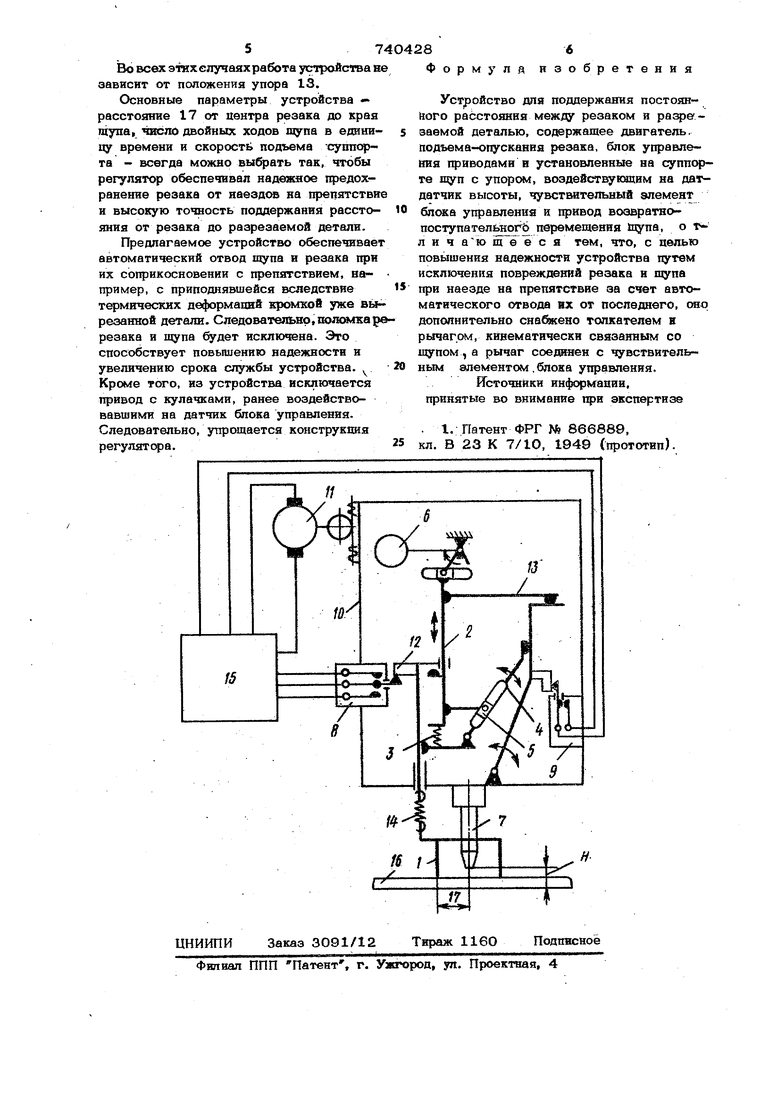
(54) УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПОСТОЯННОГО РАССТОЯНИЯ МЕЖДУ РЕЗАКОМ И РАЗРЕЗАЕМОЙ ДЕТАЛЬЮ Изобретение относится к области свар ки, а именно к устройствам для тер мической резки- листовых материалов. Известно контактное электромеханическое устройство, содержащее двигатель для подъема-оттускания резака, блок управления приводами и установленные на суппорте щуп с упором, воздействующий на датчик высоты, чувствительный элемент блока управления и привод воэвратно-поступательного:перемещения щупа. Для предотвращения ухода за пределы кромок обрабатываемой детали щуп располагается вокруг резака, а для предохранения от обгоранйя нижняя часть щупа вьшолнена из жаропрочного материала Основным недостатком этого устройства является нарушение обратной связи между горизонтальным перемещением машины и вертикальным перемещением резака при прохождении щупа устро ства через препятствии,например, через край соседней детали, приподнявшейся за за счет температурных деформаций. Это происходит из-за того, что двигатель подъема-опускания резака включается в работу на промежуток времени, -зависящий только от настройки кулачкового механизма и не зависящий от времени контакта щупа с разрезаемым листом, ТО есть двигатель подъ« а-опускашш резака может быть выключен в таков момент, когда щуп еще не стал в свое нейтральное положение ( положение, в котором и вер:ший,в нижний контакты чувствительного элемента, управлякмцего двигателем подъема-опускания резака, разомкнуты). Вследствие этсяго вероятность эаце- па и поломки резака и тупа о неровности, возникающие при резке, довопьно высока. Кроме того, устройство должно иметь специальный привод для вращения кулачзкового механизма., что.усложняет конствУ1шию, и выполнено на быстроизнагшивающихся контактных чувствительных 8лементах (выключателях). Целью изобретения является повышение надежности устройства путем ноключеняя повреждений резака н щупа при наезде шупа на препятствие, путем автоматическстО отвода его от препятствия, а также упронюния конструкции устройства. Цель достигается тем, что устройство дополвительно снабжено толкателем н рычагом, кинематически связанным со щупом, а рычаг соединен с чувствительным элементом блока управления. На чертеже изображена схема предлагаемого устройства. Устройство содержит шуп I и толкатель 2, прижатый к щупу пружиной 3 или с.обственным весом. Щуп 1 и толкатель 2 связаны между собой качающимся рычагом 4 с ползу ном 5. Толкатель 2 имеет привод воэ атно-поступательного движения 6. Резак 7, привод 6, датчики (чувствитель ны1е элементы) 8 и 9 неподвижно установлены в суппс те 10, сна&кенном приводом подъема-опускания с двигателем 11. Щуп снабкен упором 12, а упор 13 может находиться либо на щупе, либо на толкателе. Щуп выполнен состав ным и его части соединены упругим элементом (например, пружиной растяжения 14, жесткость которого больше жесткости пружины 3. Устройство бло ком управления 15, который может управлять двигателем 11 и приводом 6, и связан электрически с датчиками 8 и 9. Для увеличения срока службы устройства цёлесоо азно применение в качестве чувствительных элементов бесконтакт ньосу например, индуктивных датчиков. Устройство работает следующим образом. Ксйда стержень щупа 1 находится в нейтральном положении, то есть между резаком 7 и ра юзаемой деталью 16, выдерживается заданное рассто5шие Н сигнал с датчика 8 высоты отсутствует и суппорт 1О перемещения не имеет независимо от сигнала с датчика 9 блока управленкя. Если же стержень щупа 1 иаходитсб выше или ниже нейтрального половкения, то с датчика 8 высоты при помощи упора 12 снимается сигнал, поступающий затем в блок управления 15, в результате чего суппорт 10 поднимает ся или опускается, а резак устанавливается на заданное расстояние Н. Однако сигнал с датчика 8 высоты вызовет перемещение суппорта 10 лишь в том случае, если толкатель 2 находится вблизи своего нижнего положения и упор 13 воздействует на датчик 0 блока, управления. Таким образом, регулирование расстояния между резаком и листом производится лишь при наличии сигнала с датчика 9 блока управления. Это необходимо для того, чтобы сигналы с датчика 8 высоты снимались лишь вблизи крайнего нижнего полсжения щупа 1. Но такое взаимодействие элементов обеспечивает нс мальную работу устройства лишь тогда, когда на пути следования резака не встречается какого-либо препятствия. Такими 1фепятствиями в большинстве случаев являются края соседних уже вырезанных деталей, поднявшиеся вследствие термических деформаций. При преодолении указанного препятствия работу устройства можно показать, проанализировав три случая. При этом Оулем считать, что ход щупа всегда больше высоты препятствия. 1.Высота препятствия близка по величине к ходу щупа, щуп находится на . препятствии, а расстояние от оси резака до края препятствия равно 17, то есть расстояние от оси резака до края щупа. В этом случае толкатель 2 двигается ВНИЗ, пружины 3 и 14 деформируются, рычаг 4 поворачивается вправо, воздействуя на датчик 9 блока управления, сигсигнал с которого поступает в блок уп- равленая 15. Так как упор 12 находится выше нейтрального положения, даигатель II работает на подъем до тех пор, пока резак не окажется выше препятствия, а щуп I не установится в нейтральном полсякении упором 12. 2.Щуп уперт в гфепятствие и движется вверх. В этом случае, деформируясь, пружина 14 предохраняет щуп от повреждения до тех пср.1 тока он не окажется выше препятствия. Дальнейшая работа регулятора сводится к первому случаю. 3.Щуп уперт в препятствие и движется вниз. При эцом пружина 14 деформир жана и щуп прижат к краю препятствия. Сила трения, прилаженная к щупу, сжимает пружину 3 и поворачивает рычаг 4 вправо. Резак поднимается до преЩ}а111ения движения щупа вниз. Далее регулятора сводится последовательно ко второму и пepвo случаю.

| название | год | авторы | номер документа |
|---|---|---|---|
| Однорезаковый суппорт газорежущей машины | 1972 |
|
SU573280A1 |
| Устройство для термической резки профильного проката | 1981 |
|
SU1022787A1 |
| ГАЗОРЕЗАТЕЛЬНАЯ МАШИНА | 1972 |
|
SU415112A1 |
| Устройство для автоматического копирования рельефа почвы | 1978 |
|
SU682167A1 |
| Машина для газовой резки слябов | 1978 |
|
SU727357A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПЛАЗМЕННОЙ ГОЛОВКИ | 1991 |
|
RU2083337C1 |
| Прибор для автоматического определения твердости по Бринеллю | 1978 |
|
SU920458A2 |
| Регулятор положения инструмента относительно токопроводящей поверхности | 1985 |
|
SU1315190A1 |
| Гидрокопировальный многопроходной суппорт | 1977 |
|
SU707770A1 |
| Устройство для дообрезки ботвы высоко выступающих над почвой кормовых корнеплодов | 1985 |
|
SU1358815A1 |
