11
Изобретение относится -к системам автоматичес1 о.го контроля и регулирования, в частности к регуляторам положения резака относительно металлической поверхности при газовой и плазменной резке.
Целью изобретения является ловьше ние надежности работы регулятора.
Поставленная цель достигается вводом в устройство коммутатора, периодически разрывающего цепь питания электродвигателя привода вертикального перемещения инструмента и тахогенератора электродвигателя горизонтального перемещения инструмента, управляющего работой коммутатора.
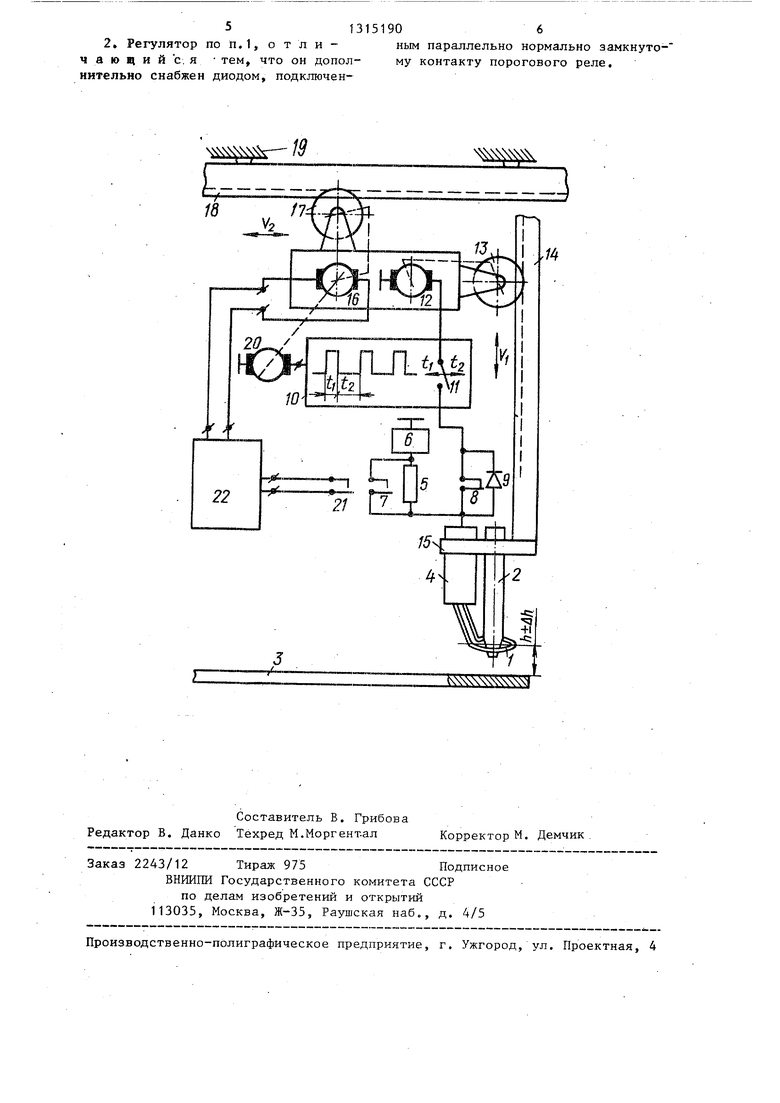
На чертеже представлена функциональная схема регулятора.
Регулятор выполнен следующим образом.
Металлический виток датчика 1 расположен вокруг мундштука резака 2 над токопроводящей поверхностью разрезаемого листа 3 и соединен с электронным блоком 4. Блок 4 содержит высокочастотный генератор, резонансную измерительную цепь, детектор, усилители напряжения и мощности и способен вырабатывать напряжение, пропорциональное разности между заданной и существующей в рассматриваемый момент высотой датчика над токопроводящей поверхностью. Параллельно выходу электронного блока 4 через ограничительное сопротивление 5 присоединена обмотка порогового реле 6. Параллельно сопротивлению 5 присоединены нормально разомкнутые контакты 7 порогового реле. Через нормально замкнутые контакты 8 этого реле, параллельно с которым включен диод 9, выход электронного блока присоединяется к коммутатору 10, замыкающий контакт 11 которого периодически замыкает на время t электрическую цепь связи с электродвигателем 12 и размыкает ее на время t. Электродвигатель 12 кинематически связан с редуктором 13 вертикального суппорта и рейкой 14 этого суппорта с кронштейном 15, на котором закреплены резак 2 и электронный блок 4 с датчиком 1.
Для перемещения регулятора с резаком параллельно разрезаемому листу предусмотрен горизонтальный суппорт, содержащий электродвигатель 16, кинематически связанный с редук
51902
тором 17 и рейкой 18, жестко связанной со станиной 19. Электродвигатель 16 кинематически связан с тахогене- ратором 20, электрический выход кото5 рого подключен к вхЬду управления коммутатора 10. Вторая пара нормально разомкнутых контактов 21 порогового реле 6 соединена с входом управляющего вычислительного комплекса 22,
10 выход которого присоединен с электроприводу горизонтального перемещения.
Регулятор положения инструмента относительно токопроводящей поверхности работает следующим образом.
15 При подаче соответствующего напряжения на электродвигатель 16 горизонтального суппорта регулятор с режущим узлом начинает двигаться, приближаясь к краю разрезаемого листа 3.
20 Сигнал с тахогенератора 20, несущий информацию о скорости горизонтального перемещения резака, поступает на вход управления коммутатора 10„ Коммутатор размыкает свой пере2-5 ключающий орган 11 на время tj. Электродвигатель 12 обесточивается, и датчик 7 регулятора, оставаясь на
высоте h, двигается горизонтально по участку пути, соответствующего рт- 30 резку:времени tj. В результате такого движения возникает ошибка по отношению к заданной высоте 4h, не,вызывающая завышенньш сигнал рассогласования,
35
Коммутатор 10 замыкает свой контакт 11 на время t , в течение которого сигнал рассогласования подается на исполнительный двигатель 12, кото-
40 рый поднимает рейку 14, выбирая накопленную ошибку. Коммутатор вновь размыкает свой переключающий орган, и указанный цикл повторяется и т.д. вплоть до того момента, когда начи45 нает проявляться краевой эффект.
Здесь за время t накапливаются ошибки, вызывающие повышенный сигнал рассогласования, от которого срабатывает пороговое реле 6 и разрывают50 ся контакты 8. Двигатель 12 обесточивается. Датчик фиксируется на высоте h, выполнение дальнейшего реза до края токопроводящей поверхности производится при нахождении датчика на
5J одной высоте без возникновения аварийной ситуации. Когда при резке вблизи кромки листа узкая полоса металла, испытывающая резкую тепловую .деформацию, выгибается, приближаясь
313
к режущему узлу, грозя нанести удар и повредить его, возникает большой сигнал рассоглаосвания, которьм че- ре з диод 9 поступает на вход электропривода 12 вертикального перемещения. Этот привод сообщает рейке 14 суппорта максимальную скорость подъема, происходит отвод режущего узла от листа 3, что исключает аварийную ситуацию.
Полярность включения диода связана с исполнением электронного блока 4 датчика 1. Если По мере приближения металлической подложки к датчику 1 сигнал отрицательной полярности уменьшается до О (при оптимальной величине рабочего зазора), а затем приобретает положительную полярность, положительньй вывод диода 9 должен быть присоединен к выходу электронного блока 4.
При приближении режущего узла к краю листа с большой скоростью сигнал с тахогенератора 20 увеличивается, что уменьшает время коммутации порогового реле 6. При уменьшении этой скорости время коммутации порогового реле 6 увеличивается. Это обеспечивает срабатывание порогового реле 6 независимо от скорости горизонтального перемещения режущего узла, вплоть до самьпс малых скоростей, причем на одном и том же расстоянии от края листа.
При использовании регулятора положения инструмента в режиме обнаружения координат кромок листа 3 резак 2, снабженный токовихревьгм датчиком 1, двигается по заранее заданной управляющим вычислительньм комплексом 22 траектории к кромке листа. На краю листа 3 срабатывает пороговое реле 6 и становится на самоблокировку с помощью нормально разомкнутых контактов 7, подключенных параллельно ограничительному сопротивлению 5, чем исключается дребезг контактов 7 и 8. В момент замыкания контактов 21 управляющий вычислительный комплекс 22 фиксирует координату соответствующей точки кромки листа. Получив таким образом после- довательно координаты ряда точек листа лежащих на его кромках, управляющий вычислительный комплекс приобретает исходные данные для решения задачи оптимального размещения карты раскроя на листе, занимающем произволь4
ном положение на- столе транспортной системы, и автоматического вывода режущего узла в точку начала реза. Использование предложенного регулятора на машинах тепловой резки позволяет осуществить стабилизацию заданного рабочего зазора между газовым или плазменным резаком и листом металла, имеющим бухтинрватость,
предотвращение аварийных ситуаций при резке вблизи кромки листа и падении вырезанной детали за пределы плоскости листа, обнаружение координат кромки листа перед началом операдии его раскроя с целью коррекции траектории движения режущего узла средствами вычислительной техники. Изобретение способствует автоматизации тепловой резки металлических
листов в судостроении и других отраслях техники.
Использование предложенного регулятора исключает возможность повреждения резаков и датчика при под
ходе последних к краю разрезаемого
листа. Исключается также возможность повреждения резаков и датчика при выполнении реза вблизи края разрезаемого листа или вблизи предыдущего 0 реза при фигурной резке лис та.
Формула изобретения
1. Регулятор положения инструмен- та относительно токопроводящей поверхности, содержащий высокочастотный датчик, выполненный в.виде витка, подключенного к электронному блоку, расположенному на механизме вер-
Q тикального перемещения инструмента, выход которого связан с катушкой порогового реле и нормально замкнутым контактом этого реле, а также электродвигатели механизмов горизон тапьного и вертикального перемещения инструмента, отличающий- с я тем, что, с целью повьш1ения надежности работы, регулятор дополнительно снабжен коммутатором с замы-
Q кающим контактом и тахогенератором, при этом замыкающий контакт коммутатора включен между нормально замкнутым контактом порогового реле и электродвигателем механизма вертикально го перемещения инструмента, тахоге- нератор установлен на валу электродвигателя горизонтального перемещения инструмента, его выход связан с входом коммутатора.
513151906
2, Регулятор по п. 1, о т л и - ным параллельно нормально замкнуто- ч а ю щ и и с. я тем, что он допол- му контакту порогового реле. нительяо снабжен диодом, подключен Чч
/
Составитель В. Грибова Редактор В. Данко Техред М.Моргент-ал
Заказ 2243/12 Тираж 975Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М. Демчик
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат кромок металлического листа и устройство для его осуществления | 1990 |
|
SU1832070A1 |
| Регулятор расстояния от инструмента до токопроводящей поверхности | 1978 |
|
SU858250A1 |
| Регулятор расстояния от инструмента до токопроводящей поверхности | 1980 |
|
SU946083A2 |
| Автоматический регулятор расстояния от инструмента до поверхности изделия | 1979 |
|
SU853894A1 |
| Способ определения координат кромок металлического листа | 1986 |
|
SU1761404A1 |
| Автоматический регулятор расстояния от инструмента до поверхности изделия | 1987 |
|
SU1423315A1 |
| Автоматический регулятор расстояния от инструмента до поверхности изделия | 1987 |
|
SU1479223A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПЛАЗМЕННОЙ ГОЛОВКИ | 1991 |
|
RU2083337C1 |
| Машина для термической резки листов | 1979 |
|
SU872086A1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПЛАНСУППОРТ | 1990 |
|
RU2027577C1 |
Изобретение относится к системам автоматического контроля и регулирования, в частности к рег уляторам положения резака относительно металлической поверхности при газовой и плазменной резке. Регулятор положения инструмента относительно токопроводя- щей поверхности позволяет повысить надежность формирования сигнала останова привода вертикального niepeMe- щения инструмента при его подходе к краю обрабатываемого материала. Поставленная цель достигается вводом, в устройство коммутатора, периодически разрывакнцего цепь питания электродвигателя привода вертикального перемещения инструмента. Тахогенератор электродвигателя горизонтального перемещения инструмента управляет работой коммутатора, обеспечивая соответствие частоты прерывания скорости горизонтального перемещения инструмента. 1 з.п. ф-лы, 1 ил. i W оо СП со
| Автоматический регулятор расстояния от инструмента до поверхности изделия | 1975 |
|
SU712212A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Регулятор расстояния от инструмента до токопроводящей поверхности | 1978 |
|
SU858250A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
