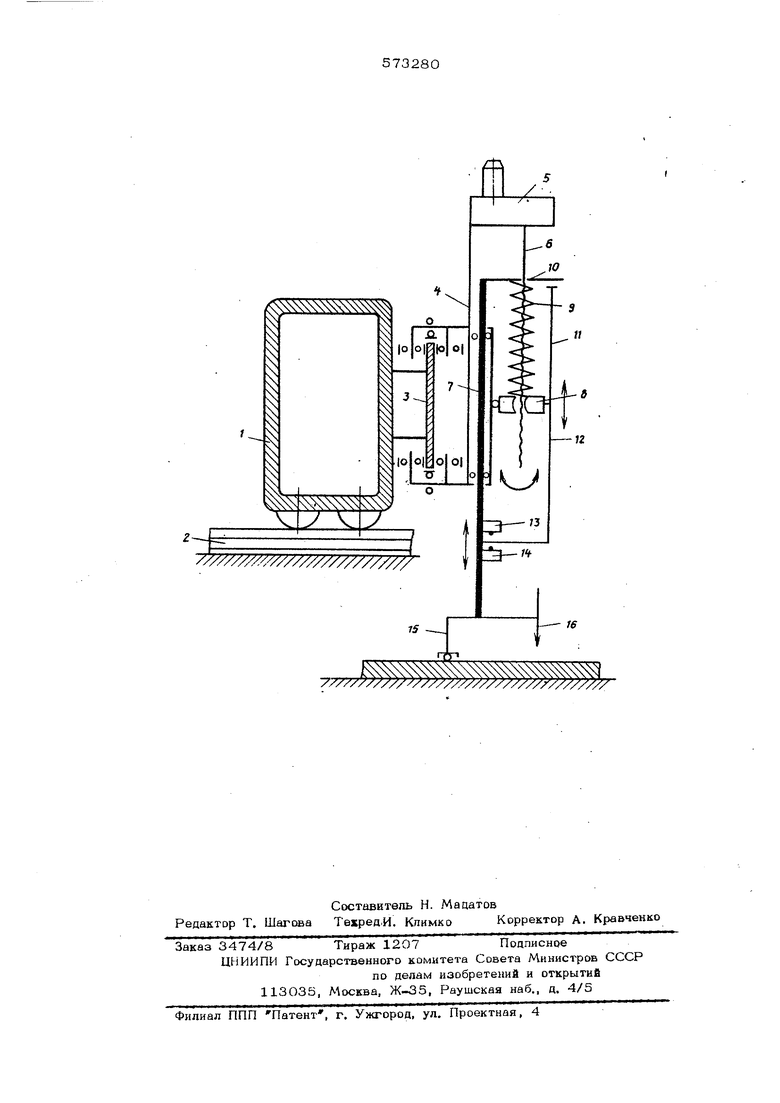
Устройство работает следующим образом. Следящий щуп 15 рассчитан на постоянный контакт с обрабатьшаемой поверхностью При солр1Я косноБении с коробленной поверх- ностью следящий щуп 15 в зависимости от ее бугррв или впадин передает возвратно-поступательное движение ползуну 7, а с ним и резаку 16. Движение ползуна 7 ввер растягивает пружину 9, При атом конечный выключатель 13 соприкасается с нелодви)вым в этот момент упором.11. Включается двигатель 5 и вступает в работу пара винтгайка. Гайка 8 перемещается вверх, сжимая пружину 9 до тех пор, пока движущийся вместе с гайкой упор 11 не освободит конечный выключатель 13, который, разомкнувшись, отключаеэ; двигатель. Апалогично работает устройство при движении следящего щупа 15 во впадине обрабатываемой поверхности, но при этом срабатывает конечный выключатель 12, а гайка 8 перемещается по валу 6 вниз, растягивая пружину 9. Когда щуп 15 достигает положения у края листами зависает в воздухе, кронштейн 10 соприкасается с упором 11 а электросзеема переключается в положение край диета. По этой команде включается двигатель, который перемещает гайку 8 вверх до замыкания щуда 15, после чего электродвигатель выключается и автоматически больше не вкл сяаетсд. Расстояние между упором 11 и кродщейном 10 в этом положе нии составляет О,5 мм. После схода с.листа система опускается на величину зазора и зависает, на гайке 8 неподвижно. Устройство с механической системой слежения за обрабатываемой поверхностью обеспечивает точность в диапазоне ±0,5 мм, повышает производительность труда, более просто и дешево в изготовлении и эксплуатации. Формула из обретен и Однорезаковый суппорт газорежущей машины, содержащий редуктор с приводным двигателем и выходным валом, следящий шуп, жестко связанный с узлом вертикального перемещения, с ползуном, несущим резак и установленным с возможностью вертикального перемещения, упор, соединенный с выходным валом, и подпружиненную кинематическую пару, жестко связанную с приводом, отличающийся тем, что, с целью разгрузки щупа и повышения точности слежения в процессе резки, один конец пружины кинематической пары жестко связан с Тпопзуном, а друхой закреплен Hai элементе кинематической пары, например винтовой, установленном с возможностью возврат- но-поступательного вертикального перемещения, жестко связанном с упором и кинемат№чески связанном с выходным валом редукто-i ра. Источники информации, принятые во внимание при экспертизе: 1. Чертеж ВНИИавтогенмаш, Д 3044, 26.02.72.
f
VI
/////// //////////////////
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для газопламенной обработки изделий преимущественно изделий с ребрами жесткости | 1979 |
|
SU872088A1 |
| ГИДРОКОПИРОВАЛЬНЫЙ ПОПЕРЕЧНО- СТРОГАЛЬНЫЙ СТАНОК | 1971 |
|
SU290799A1 |
| Станок для обработки изделий | 1985 |
|
SU1269956A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ФРЕЗЕРНЫЙ СТАНОК ДЛЯ ПРОДОРОЖИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 1970 |
|
SU285457A1 |
| Устройство для стабилизации расстояния между резаком и разрезаемым металлом в машинах для термической резки | 1976 |
|
SU570466A1 |
| Полуавтоматический станок для продороживания коллекторов якорей электрических машин | 1961 |
|
SU140873A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2174628C1 |
| Копирное устройство для обувных машин | 1979 |
|
SU784861A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| ПОЛУАВТОМАТ ДЛЯ ДОВОДКИ ГЛУХИХ ОТВЕРСТИЙ | 1971 |
|
SU300303A1 |
, // //// /////////////////////////,
