(54) УСТРОЙСТВО ДЛЯ УСТАНОВКИ, ПОВОРОТА И ЗАКРЕПЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Штамповочный комплекс | 1988 |
|
SU1609537A1 |
| Устройство для сборки под сварку обечаек | 1989 |
|
SU1729723A1 |
| Способ подачи полосового материала к прессу и устройство для его осуществления | 1985 |
|
SU1279719A1 |
| Токарный автомат | 1970 |
|
SU352711A1 |
| ПРОФИЛЕГИБОЧНЫЙ СТАН | 2004 |
|
RU2276627C1 |
| Устройство для шлифования | 1990 |
|
SU1779551A1 |
| ТРЕХВАЛКОВАЯ ЛИСТОГИБОЧНАЯ МАШИНА | 2001 |
|
RU2200070C1 |
Изобретение относится к станочным приспособлениям.
Известно устройство для установки, поворота и закрепления цилиндрических деталей, содержащее призматачеркий корпус, на наклонных плоскостях которого выполнены вырезы для размещения в них осей опорных роликов, и узел закрепления детали, состоящий из гибкого элемента и привода, выполненного в виде передачи винт-гайка l .
11«ль- изобретения - расширение технологических возможностей устройства.
Это достигается тем, что предлагаемое устройство снабжено опорным корпусом, в направляющих которого установ лен призматический корпус, который свя.зан с введенными в уст|эойство подъемными цилиндрами, а также механизмом прворота опорного ролика, при этокг привод узла закрепления кинематически связан с одной стороны с механизмом поворота опорного ролика, а с другой - с подъемными цилиндрами.
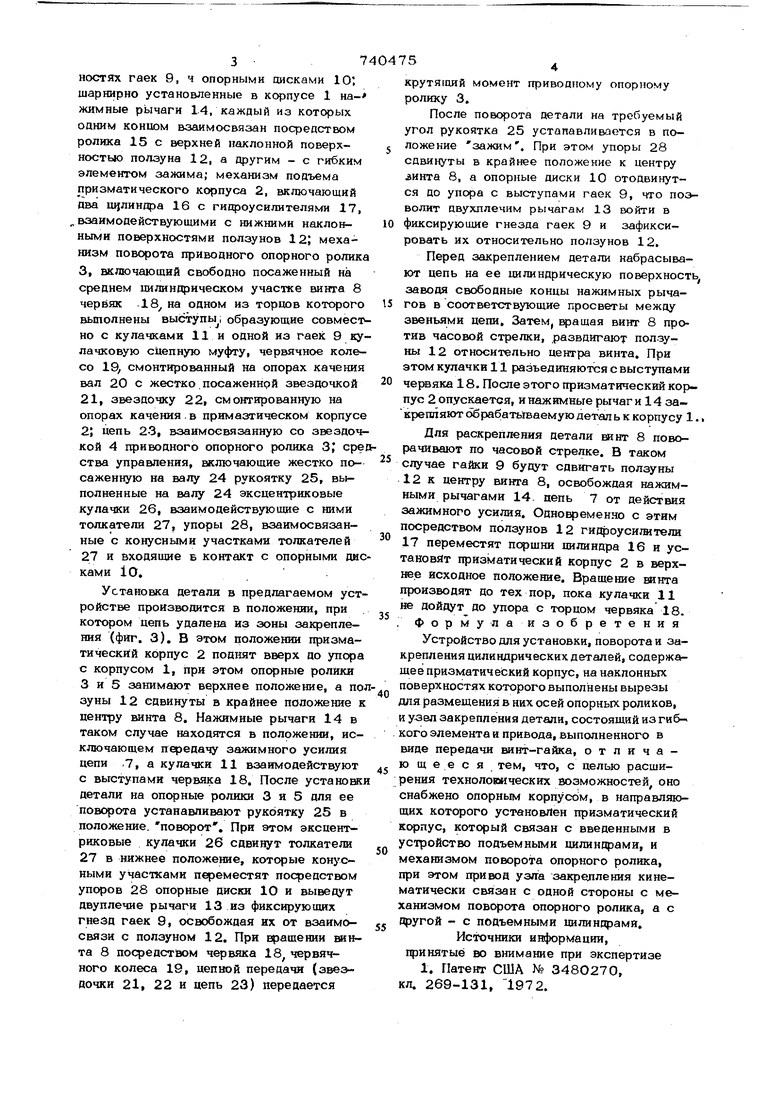
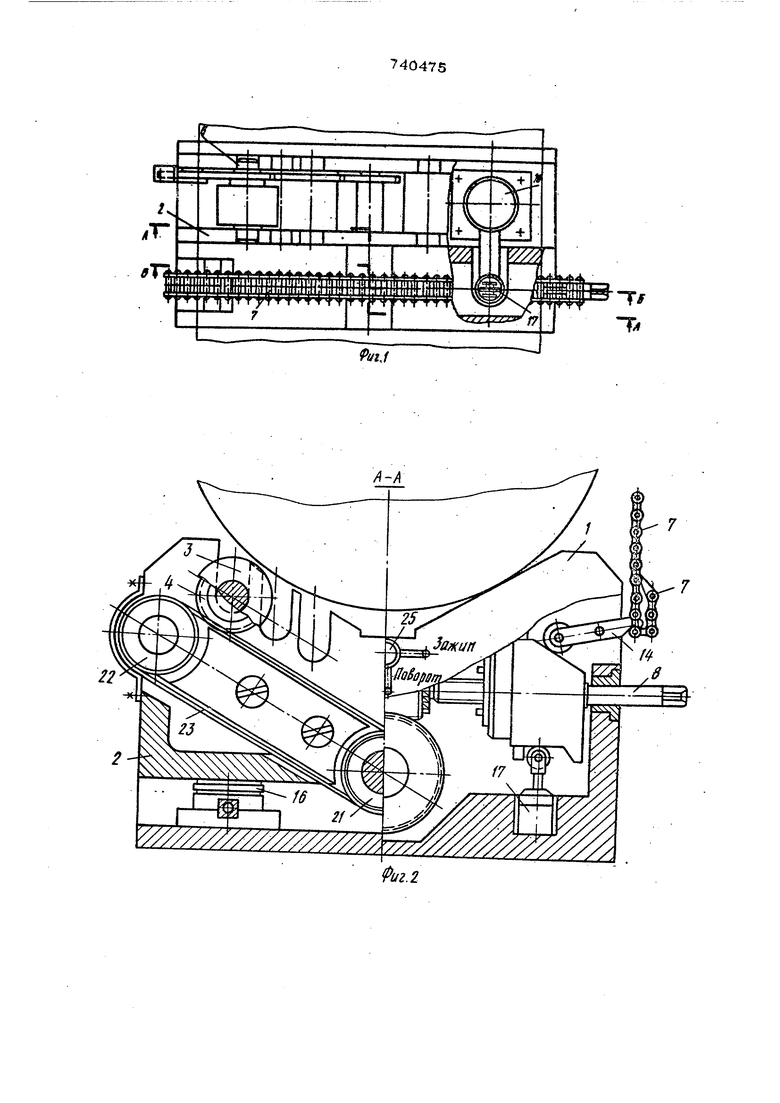
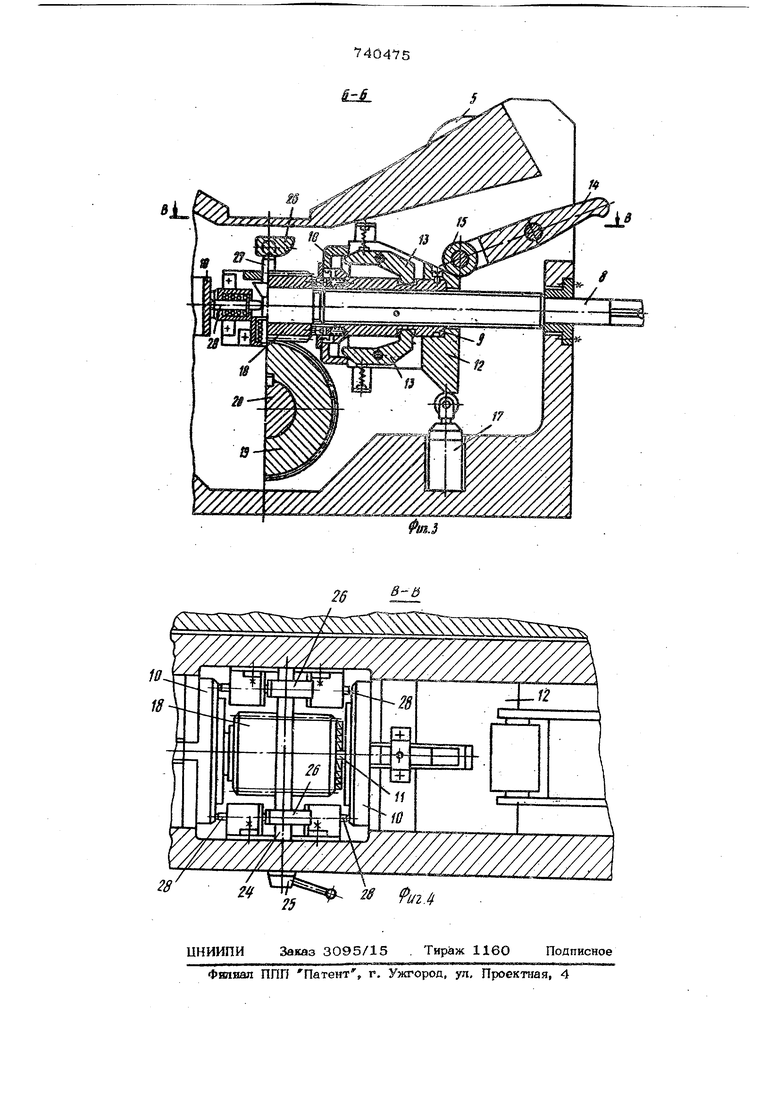
На фиг. 1 показано описываемое устройство, план; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - Б-Б на фиг. Ij устройство с поднятым опорным кфпусом и раскрепленной деталью; на фиг. 4 - разрез В-В на фиг. 3.
Устройство содержит опорный корпус 1, в направляющих которого размещен призматический корпус 2, на встречных
Q наклонных поверхностях которого в вьфезах размещены приводной ролик 3 со звездочкой 4 и неприводной ролик 5, установленные на осях 6 в опорах качения, гибкий элемент- зайшма, например роликовая
,5 цепь 7 взаимосвязанный с механизмом закрепления, включающим винт-8 с участками левой и правой резьбы, а также гайки 9 с опорными дисками 10 и вмонтированными в нихС возможностью осевого
2Q перемещешш кулачками 11;- ползуны 12 с шарнирно установленными подпружиненными двуплечими рычагами 13, взаимодействующими с фиксирующими гнездами, выполненными на цилиндрических поверх37ностях гаек 9, ч опорными дисками 101 шарнирно установленные в корпусе 1 нажимные рычаги 1.4, каждый из которых одним концом взаимосвязан посредством ролика 15 с верхней наклонной поверхностью ползуна 12, а другим - с гибким элементом зажима; механизм подъема призматического корпуса 2, включающий два цилиндра 16 с гидроусилителями 17, „взаимодействующими с нижними наклонными поверхностями ползунов 12J механизм поворота приводного опорного ролика 3, включающий свободно посаженный на среднем цилиндрическом участке винта 8 червяк 18 на одном из торцов которого вьтолнены выступы ; образующие совмест но с кулачками 11 и одной из гаек 9 ку лачковую сцепную муфту, червячное колесо 19, смонтированный на опорах качения вал 20 с жестко.посаженной звездочкой 21, звездочку 22, смонтированную на опорах качения . в примазтическом корпусе 2; цепь 23, взаимосвязанную со звездочкой 4 приводного опорного ролика З; сре ства управления, включающие жестко посаженную на валу 24 рукоятку 25, выполненные на валу 24 эксцентриковые кулачки 26, взаимодействующие с ними толкатели 27, упоры 28, взаимосвязанные с конусными участками толкателей 27 и входящие Б контакт с опорными дис ками Ю, Установка детали в предлагаемом уст ройстве производится в положении, при котором цепь удалена из зоны закрепления (фиг. 3). В этом положении призматический корпус 2 под1шт вверх до упора с корпусом 1, при этом опорные ролики 3 и 5 занимают верхнее положение, а по зуны 12 сдвинуты в крайнее положение к центру винта 8. Нажимные рычаги 14 в таком случае находятся в положении, исключающем передачу зажимного усилия цепи .7, а кулачки 11 взаимодействуют с выступами червяка 18. После установк детали на опорные ролики 3 и 5 для ее поворота устанавливают рукоятку 25 в положение, поворот. При этом эксцентриковые кулачки 26 сдвинут толкатели 27 в нижнее положение, которые конусными участками переместят посредством упоров 28 опорные диски 10 и выведут двуплечие рычаги 13 из фиксирующих гнезд гаек 9, освобождая их от взаимосвязи с ползуном 12. При вращении винта 8 посредством червяка 18, червячного колеса 19, цепной передачи (звездочки 21, 22 и цепь 23) передается 5 крутЯЕОИй момент приводному опорному ролику 3. После поворота детали на требуемый угол рукоятка 25 устанавливается в положение зажим. При этом упоры 28 сдвинуты в крайнее положение к центру зинта 8, а опорные диски 10 отодвинутся до упора с выступами гаек 9, что позволит цвухплечим рычагам 13 войти в фиксирующие гнезда гаек 9 и зафиксировать их относит:«льно ползунов 12, Перед закреплением детали набрасывают цепь на ее цилиндрическую поверхность заводя свободные концы нажимных рычагов в соответствующие просветы между звеньями цепи. Затем, вращая винт 8 против часовой стрелки, развдигают ползуны 12 относительно центра винта. При этом кулачки 11 разъединяются с выступами червяка 18. После этого призматический корпус 2 опускается, и нажимные рычаги 14 за крепляют обрабатываемую летал ь к корпусу 1.. Для раскрепления детали винт 8 поворачивают по часовой стрелке. В таком случае гайки 9 будут сдвигать ползуны 12 к центру винта 8, освобождая нажимными рычагами 14. пепь 7 от действия зажимного усилия. Одновременно с этим посредством ползунов 12 гидроусилители 17 переместят псрщни цилиндра 16 и установят призматический корпус 2 в верхнее исходное положение. Вращение шнта производят до тех пор, пока кулачки 11 не дойдут до упора с торцом червяка 18. Формулаизобретения Устройство для установки, поворота и закрепления цилиндрических деталей, содержащее призматический корпус, на накпонньрс поверхностях которого выполнены вырезы для размещения в них осей опорных роликов, и узел закрепления детали, состоящий из гиб-кого элемента и привода, выполненного в виде передачи винт-гайка, о т л и ч а Ю щ е е с я .тем, что, с целью расщирения технолоюических возможностей, оно снабжено опорным корпусом, в направляющих которого установлен призматический корпус, который связан с введенными в устройство подъемными цилиндрами, и механизмом поворота опорного ролика, при этом привод закрепления кинематически связан с одной стороны с механизмом поворота опорного ролика, а с Другой - с подъемными цилиндрами. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3480270, кл. 269-131, 1972.
