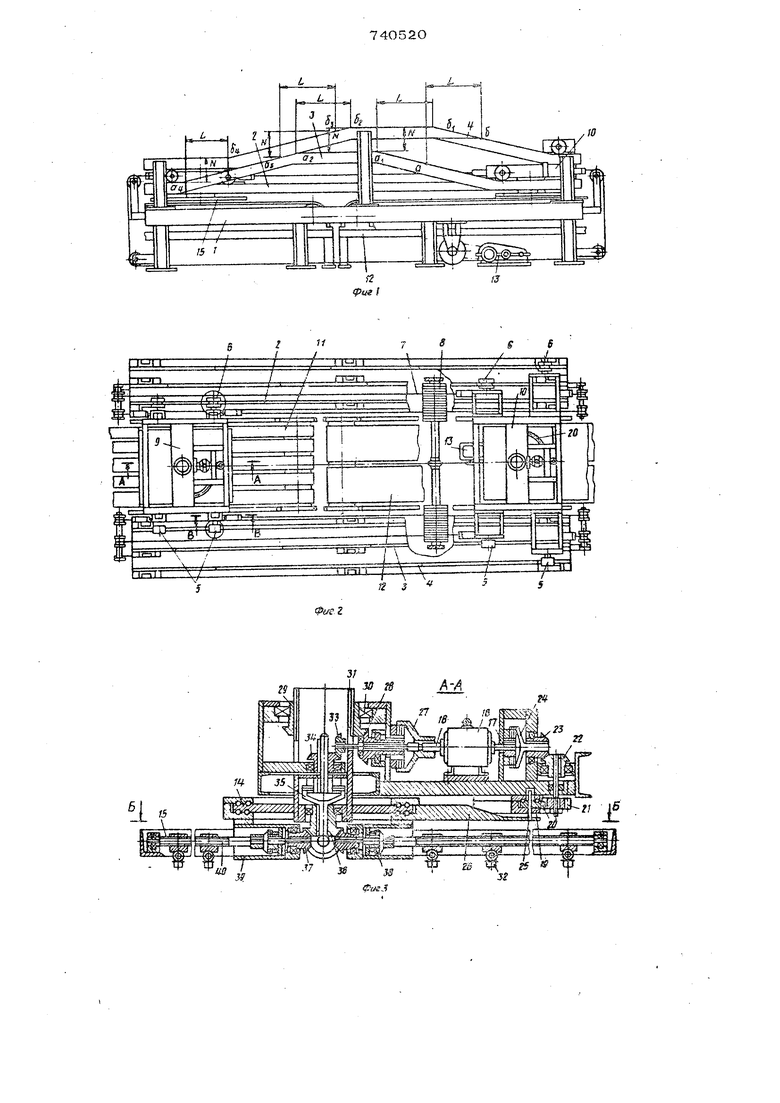
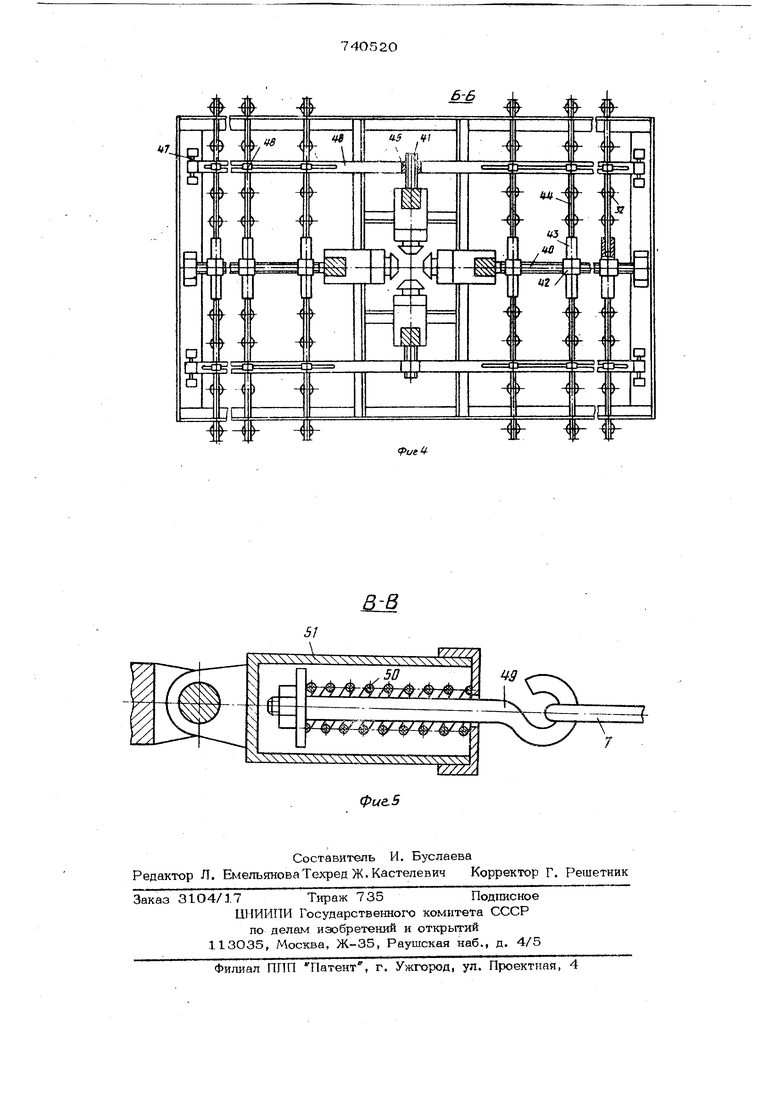
реток, снабжено допошштагтьными парами направляющих, на которых установлезш одна из кареток и рабочая поверхность которых выполнена с криволинейным профилем, обращеш-1ым вьшуклостью ввер а также тем, что профили рабочих поверидастей дополнительных направляющих имеют одинаков пю конфигурацию и распо ложены относительно друг друга со смещением в вертикальной и горизон тельной плоскостях, такхсе и тем, что каждая ИЗ точек профиля, вьгбранная на рабочей noBepxHocnt одной из «ар дополнительных направляющих, расположена на одинаковом расстоянии в вертиказ ько плоскости от соответствующей точки профиля ка рабочей поверхи&сти другой, пары дополкательных напраЕЛяюншх при условии, что расстояния мелсдз каждой парой выбранньгх точек равны между собой в горизонтальной плоашсти и равны в свою очередь расс-юя шю в э-гой же плоскости между парой ; опэр, соответстуюпшх кахсдой паре дополнительных направляющих, также и тем, что захваты вающие элементы установлены с возможностью Еозвратно-поступатечьного перемешенлш в горизонтальной плоскости относите.г1ьно прихватов На фиг. 1 изображено устройство, общий ВИД; сбоку на . 2 - устройств в плане; на фиг 3. -- разрез А-А фиг.2 на фиг. 4 разрез Б-Б фйг.-З;, на . 5 разрез В-В фиг.2. Устройство (фиг.Х) содержит раму 1 с одной парой горизонтальных напраёпшо . тих 2 и двух пар дополнительных на-правляюших 3,4 с криволинейным про-филем рабочей поверхности, o6paHieHHb iv выпуклостью вверх. На направляющих 2,3,4 (см. фиг.2) установлены на опорах качевзгя 5 без реборд и опорах качештя 6 с ребордами, связа шые кана1Х)М 7 через приводные барабаны 8,, подвижные каретки 9 и Ю расположенные над транспортером 11 диагонально-резательной машины и сты ковочйь д транспортером 12. FIpiiHeM ка . ретка 9 установлена на горизонтальных направляющих 2, а Каретка 1О на двух парах .дополнительных направлшощих 3, Профили рабочих поверхностей последних имеют ош-niaKOBjno конфигурацию и расположены относителтэно друга на разных j-poBKHX, так что ка-яадая на т:оче а. , а на профиля, выбранная на рабочей поверхности нанравляю щей 3, расположена на од1:наковом рас70 стрянии Н в в этикальной плоскости от точек б, б, бд, 6j и б профиля, выбранных на рабочей поверхности направляющей 4, при условии, что расстояния между точками аб, , , , аб,и d, б. 3 горизонтальной плоскости равны г ... собой и равны расстоянию 1 в этой vKe плоскости между паршей опор каче1В1я 5 и 6 каретки 10. Барабаны 8 связаны с приводом 13 (фиг. 2). На каретках 9 и 10 на опорах качегшя 14 (фиг.3)-установлены одинаковьге, выполненные в виде рамок прихваты 15, Электродвигатели 16, установленные ка каретках 9-и 10, имеют два выводных конца валов: правые 17 и левые 18.I . Для поворота прихватов 15 на каретках 9 и 1О в опорах качения 19 установлены зубчатые секторы 2О, входяише в зацепление с шестернями 21, которые «ереа зубчатые передачи, образованные шестернями 22 и 23, и электромуфты 24 связаны с правыми вьшодными концами валов 17 электродвигателей 16. В секгоры 20 со свободным вертикальньш переме ценнем введены пальцы 25, установленные на рычагах 26, которьге жестко связаны с прихватами 15. Для подъема и опускания прихватов 15 каретки 9 и 10 содержат электромуфты 27, установленные на левых выводных концах валов 18 эяектродвш ателей 16, и зубча-тые передачи, образованные шестернями 28 к 29. Шестерни 29, заф}пссированные в опорах качения 30, соединены гильзами 31, образовав между собой винтовые пары. Гильзы 31 связаны с опорами качения 14. Для перемещения захватываюишх элеjvseHTOB 32 прихватов 15 в горизонтальг ной гшоскостн каретки 9 и 10 содержат зубчаа ые яередач1 1, образованные тестер- . нями 33 и 34, электромуфты 35 и шестерш 36, образjToume с установлеш ыми на каждом прихвате 15 четырьмя шестернями 37 зубчатые передачи. На прихватах 15 шестерни 37 связаны с четырьмя эпектромуфтами 38, установленными в корпусак 39 на двух валах 40 и двух валах 41 (фиг. 4). Валы 40 и 41 имеют винтовую нарезку ко всей длине. На валах 4О установяены гайки 42 с трубами 43, служащими направляющими- для труб 44s к которым прикреплены, выставлеш- ые в одной горизонтальной плоскости, захватывающие элементы 32-. На валах 41-устакоБлены гайки 45 с поводками 46, концы которых удерживаются на параллелыю выставленнь х на прихватах 15 направл5оощйх 47. В гфодольныв пазы поводков 46 введены шпильки со шляпками 48, установленные на трубах 44 и обеспечивающие перемещение эруб относительно поводков 46 лишь в продольном направлении последних. Концы каната 7 {фиг. 5) закреплены на стержнях 49, ударживакяиих канат 7 в натянутом состоянии при помощи пружин 5О, установленных в корпусах,5 которые шарнирно связины с карегками и Ю. Устройство работает спедующи об- разом о Подаваемая транспортером 11 двигатепьно-резательной машины (фиг.2) раск роенное обрезинейное полотно (на фиг. не указано) поступает в зону отбора, а транспортер 11 двигатель-резательной машины отключается. На каретках 9 и Ю В5(лючаются электромуфты 27 (фнг. З). Электродвигатели 16 вращают шестерни 29, которые при помощи винтовых соединений с гильзами 31о1гускают прихва ты 15. При помощи захватывающих элементов 32 прихват 15. установленный на телех.ке 9, захватывает раскровЕШое полотно, а прихват 15, установленный на тележке Ю, подстьтовывает предыдущее полотно к уже состьпсованньл полосам на стыковочном транспортере 1 Вращаясь в обратную сторону, шествии 29 поднимают прихваты 15 в верхнее положение и электромуфты 27 отключаются. Каретки 9 и 1О (фиг. 2) с помощью . привода 13 меняются местами, и следую щее раскроенное полотно поступает в зону отбора на транспортере 11 диагонально-резательной мащины. Переметцаяс по 1Х1ризонтальным направляющим 2, (фиг.1) каретка 9 останаливается в зоне стыковки раскроенного обрези.ненного полотна над сть1ковочным транспортером 12, а каретка 10, перемещаясь по дополнительнь1м н правляющим 3 и 4, останавливается в аоне отбора раскроенного обрезиненного гю.тотна над транспортером двигатепьнорезательной машины 11. Направляющие 3 и 4 гюзволяют во время пери дещени избежать столкновения кареток 9 и 1О за счет того, что в месте их встречи каретка Ю находится выше каретки 9. Вследствие того, что левая и правая пары опор качения 5 и 6 каретки Ю 7 О6 oatiOBp vfeKHo начинают подниматься и опускаться по налравл аэщкм 3 н 4, каретка Ю с прихватом 15 совершает шюско-пзраллельное перемещение, сохраняя при этом устойчивое горизонтальное попожение на любом участке яаправлякхоюс. На участках же отбора я стыковки раскро пюго о ю шнешюго пс лотна каретки 9 и 10 с прихватами 15 распюлагаются помимо тетчэ в одной гсгрйзонтальной ШЮСК0СТИ, максвмальво орибпижешюй к отбираемому к стыкуемому обрезинешюму полотну. Разшэсть длиньг щкубзга кареток кда«пексируется пружинами 5О (фяг.б), т.е. в том случае, когда каретка Ю находится на участках рабочей пов хностк направляющих 3,4, расположенных вьппе рабочЫ noeqpxHocTH направлязкйдей 2, то пружина 5О, сжимаясь под действием силы натяжения, высвобождают стержни 49 из : корпусов 51. В том случае, когда карвт ки находятся на уровне, т.е на участках отбора и стьпсовки плотна, пру1жины 5О возвращаются в исходное положение. При пер дацешш кареток 9 и Ю (фиг.2) происходит поворот прихвата 15, установлешйзго на каретке 9, на угол, обуслоЕлетшый уг-лом за1фоя обрвэашенного ПОНОТ1Ш, а прихват 15 каретки Ю поворачивается в исходное копоженив для захвата .полосы обрезккенвого погютка. Это достигается пуг&л вкпючекяя электромуфт 24 (|жг. 3). Зубчатью секторы 20 щж этом, двигаясь в направляющих 19, воздействуют через пальцы 25 на рычага 26, а прихваты 15 га ворачиваются в опорах качения 14. После остановки кареток 9 и Ю щяск.вата-г 15 (фиг. 2) опускаются. При этом прихват 15, установленный на каретке 9, подстыковывает полотна к предьщущей поте)се, а прихват 15, устновпевный на каретке 10, захватывает в зоне отбора новое шмютао. Прихваты 15 поднимаются, а К фета:к 9 0 1О меняются местами, прж этом прихват 15, установленный на каретке 9, возвращается в исходное положение для захвата raiBofi полосы обрваиненного аооютна в зоне отбора, а прихват 15, установленный на тележке 1О, разворачрвается на угол, обуслювленяый углом закроя обезреаанеяного полотна. В случае олещения раскроенного полотна 5 зоне отбора от заданного положения, либо при изменении его размеров гфихватах 15 (фиг.З) включаются 77 одновременно электромуфты 35 и электромуфты 38, либо поочередно. Валы 40 и 41 {фиг. 4) вращаясь, перемещают гайки 42 и 45 вдоль своих осей. Гайки 42, двигаясь на валах 41, перемещают трубы 43 и 44 с захватывающими элементами 32 в направлении смещения кромок полос обрезиненного no тютна и при установке крайних труб 44 (фиг.4) с захватывающими элементами 3 над кpo Пcaми полос обрезиненного полот на электромуфты 38 отключаются. Гашш 4S, двигаясь на валах 41, перемещают ПОВОДЮ1 46. Поводки 46, воздействуя на щяилькн со шляпками 48, двигают трубы 44 с захватывающими элементами 32 в осевом направлении . в сторону смещения кромок полос обрезиненного полотна. Электромуфты 38 (фиг.ЗЬустановленные на валах 41 (фиг.4;, отключаются при установке кра них захватывающих элементов 32 над кромками полос обрезиненного полотна. Примене1ше устройства позволит по высить производительности процесса отбора к стыковки обрезиненного полотна, уменьщить его трудоемкость, повысить качество стыка и уменьщить отходы плотна. Формула изобрет е н и я 1. Устройство для отбора и стьпювк раскроенного обрезиненного полотна, содержащее раму, установленные свои /ш опорами на направляющих и кинематически св55:занные между собой подвиж зьге каретки с приводом их перемещения, устано ленные на каретках подвижные прихваты с захватывающими элементами и механизмы для возвратно-лоступательного перемет 1тя прихватов в вертикальном направле 0 нии и регулируетлого поворота их относсительно кареток, отличаю щеес я тем, что с целью повыше шя 1троизводительности процесса отбора и стыковки, окр снабже Ю дополшггельными парамп направляющих, на которых установлена одна из кареток и рабочая поверх- ность которых вьшолнена с криволиненым профилем, обращенным выпуклостью вверх. 2.Устройство по п. 1, о т л и ч а ющ е е с я тем, что профили рабочих поверхностей дополнительнь1Х направляющих имеют одинаковую конфигурацию и расположены относительно друг друга со смеще1шем в верт1ткальной и горизонтальной плоскостях. 3.Устройство по п. 2 о т л и ч а ющ е е с я тем, что каждая из точек профиля, выбрашсая на рабочей поверхности одной из пар дополнительных направляющих, расположена на одинаковом расстоянии в вертикальной плоскости от соответствующей точки профиля на рабочей поверхности другой пары дополнительных направляющих при условии, что расстояния между каждой парой выбранных то.чек равны между собой в горизонтальной плоскости и равны в свою очередь расстоянию в этой же плоскости между парой опор, соответствующих каждой паре дополнительных направляющих. 4б Устройство по п. 1, о т л и чающееся тем, что с целью повыщения качества стыка захватывающие элементы установлены с возможностью возвратно-поступательного перемещения в горизонтальной плоскости относительно прихватов.. . Источшпш информации, принятые во внимание при экспертизе 1. Ав-рорское свидетельство СССР № 373171, кл. В 29 Н 17/30, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стыковки обрезиненных полос | 1978 |
|
SU765010A1 |
| УСТРОЙСТВО для стыковки и РАСКРОЯ ОБРЕЗИНЕННОГО ПОЛОТНА | 1970 |
|
SU286208A1 |
| Устройство для отбора и перекладки полос обрезиненного корда | 1982 |
|
SU1130493A1 |
| Машина для отделения плодоножек | 1982 |
|
SU1090328A1 |
| Устройство для настилания и раскраивания длинномерных материалов | 1983 |
|
SU1183384A2 |
| Агрегат для раскроя и стыковки корда | 1982 |
|
SU1065240A1 |
| РЕЖУЩЕЕ УСТРОЙСТВО ДЛЯ РАСКРОЯ ОБРЕЗИНЕННОГО МЕТАЛЛОКОРДНО ГО ПОЛОТНА | 1971 |
|
SU317545A1 |
| Устройство для перекладки полосового кордного материала | 1987 |
|
SU1475817A1 |
| УСТРОЙСТВО для ОТБОРА С ТРАНСПОРТЕРА РЕЗАТЕЛЬНОЙ | 1973 |
|
SU368062A1 |
| Устройство для раскроя и стыковки обрезиненного полотна | 1986 |
|
SU1407845A1 |