2.Устройство по П.1, отличающееся тем, что, механизм отбора выполнен в виде транспортера,
3.Устройство по п.1, отличающееся тем, что направляющие выполнены в виде расположенных один над другим равным треугольников с закругленными углами и смонтированы над копиром.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отбора и перекладки полос обрезиненного корда | 1986 |
|
SU1435490A2 |
| Агрегат для раскроя и стыковки корда | 1982 |
|
SU1065240A1 |
| Устройство для перекладки и стыковки полосового материала | 1989 |
|
SU1705121A1 |
| УСТРОЙСТВО для ПЕРЕКЛАДКИ И СТЫКОВКИ | 1973 |
|
SU374200A1 |
| Устройство для перекладки резино-кордного материала | 1981 |
|
SU1028529A1 |
| Устройство для закатки обрезиненного корда | 1983 |
|
SU1100126A1 |
| Устройство для стыковки полос обрезиненного полотна | 1981 |
|
SU1131674A1 |
| Устройство для захвата ленточного материала | 1982 |
|
SU1183392A1 |
| Устройство для закатки резинокордного материала | 1983 |
|
SU1183393A1 |
| Устройство для перекладки полос резинокордного материала | 1983 |
|
SU1123880A1 |

1.УСТРОЙСТВО ДЛЯ ОТБОРА И ПЕРЕКЛАДКИ ПОЛОС ОБРЕЗИНЕННОГО КОР ДА, содержащее питающий транспортер раму с закрепленными на ней криволи нейными направляющими, установленны на последних и кинематически связанные между собой подвижные кар ки с приводом для их перемещения смонтированные на каретках подвижные захваты с захватными элементами, средство для перемещения захватов и отборочный транспортер, отличающееся тем, что, с целью обеспечения контроля качества обрезиненной поверхности корда, оно снабжено закрепленным на раме копиром в виде замкнутого профиля с плоским участком и с криволинейным участком, который расположен над питающим транспортером, и смонтированньш на питающем транспортере механизмом отбора, кинематически связанным с приводом питающего транспортера и установленным под криволинейным участком копира.
Изобретение относится к шинной промьгашенности и предназначено для отбора и перекладки полос обрезиненного корда с транспортера диагонапьно-резательной машины на стыковочньй транспортер.
Известно устройство для отбора и перекладки полос обрезиненного корда с транспортера диагональнорезательной машины на отборочный транспортер, содержащее закрепленное на раме захватное приспособлени установленное с возможностью возвратно-поступательного перемещения и имеющее штангу с захватами для полос корда и привод для поворота штанги в виде закрепленного на ней ролика, контактирующего- с направляющей, смонтированной на раме 1J
Недостатком данного устройства является возможность слипания част заготовок корда при перевороте, что ведет к браку вследствие трудности разъединения липких поверхностей., потерям времени на устранение брака и, в конечном счете, к снижению производительности.
Наиболее близким к изобретению net технической сути и достигаемому результату является устройство для отбора и перекладки полос обрезиненного корДа, содержащее питающий транспортерj раму с закрепленными ней криволинейными нaпpaвляющи и, установленные на последних и кинематйчески связанные между собой повижные каретки с приводом для их перемещения, смонтированные на каретках подвижные захваты с захватными элементами, средство для пере мещения захватов и отборочный транспортер 23,
Однако в известном устройстве каретки имеют остановки в своих крайних положениях на направляющих
в зонах отбора и стыковки. Кроме того, невозможность поворота полос корда на 90 из-за определенного взаимного расположения направляющих и их формы не позволяет обеспечить контроль качества обрезиненной поверхности корда с обеих сторон, так как полосы корда ложатся на транспортер диагонально-резательной машины и стыковочный транспортер одной и той же стороны.
Цель изобретения - обеспечение контроля качества обрезиненной поверхности корда .
Поставленная цель достигается тем, что устройство для отбора и перекладки полос обрезиненного корда, содержащее питающий транспортер, раму с закрепленными на ней криволинейными направляющими, установленные на последних и кинематически связанные между собой подвижные каретки с приводом для их перемещения, смонтированные на каретках подвижные захваты с захватными злементами, средство для перемещения захватов и отборочный транспортер, снабжено закрепленным на раме копиром в виде замкнутого профиля с плоским участком и с криволинейным участком, который расположен над питающим транспортером, и смонтированным на питающем транспортере механизмом отбора, кинематически связанным с приводом питающего транспортер и установленным под криволинейным участком копира.
Кроме того, механизм отбора выполнен в виде расположенных один над другим равных треугольников с закругленными углами и смонтированы над копиром.
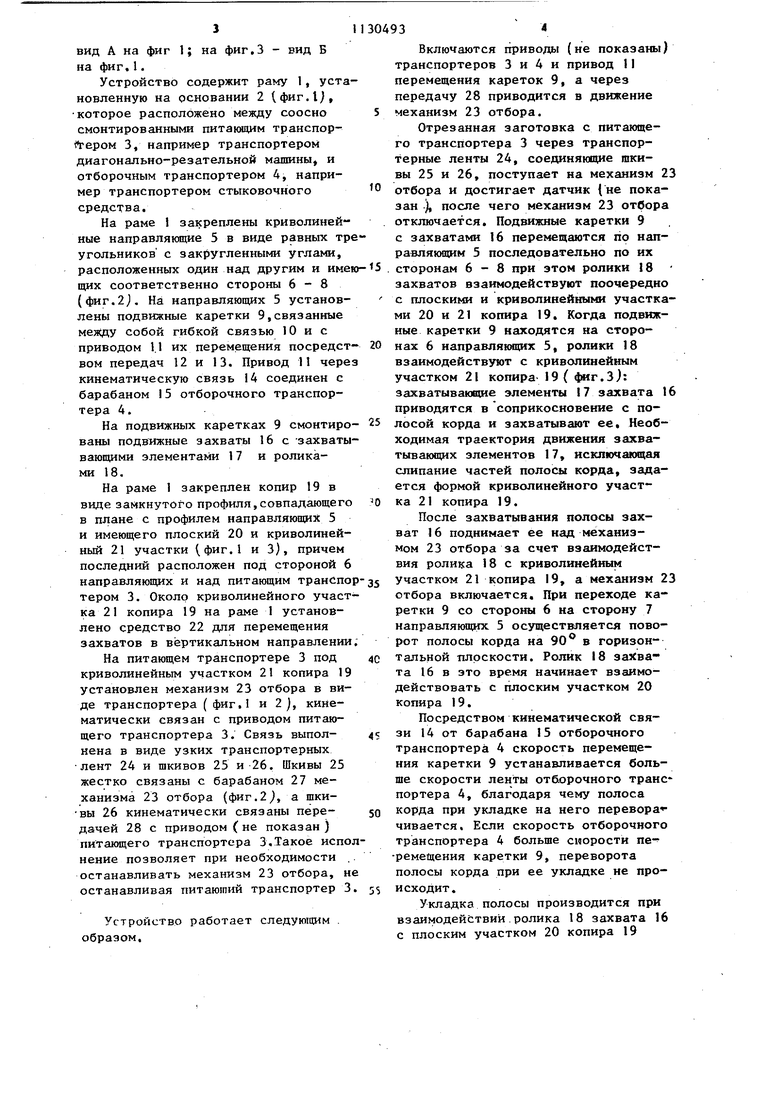
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг,2 вид А на фиг 1; на фиг.З - вид Б на фиг,1. Устройство содержит раму 1, уста новленную на основании 2 (фиг.1), которое расположено между соосно смонтированными питающим транспор(ером 3, например транспортером диагонально-резательной машиньц и отборочным транспортером 4, например транспортером стыковочного средства. На раме 1 закреплены криволинейные направлякяцие 5 в виде равных тр угольников с закругленными углами, расположенных один над другим и име щих соответственно стороны 6-8 (фиг.2. На направляющих 5 установлены подвижные каретки 9,связанные меясду собой гибкой связью 10 и с приводом 1,1 их перемещения посредст вом передач 12 и 13. Привод 11 чере кинематическую связь 14 соединен с барабаном I5 отборочного транспортера 4. На подвижных каретках 9 смонтиро ваны подвижные захваты 16 с захваты вающими элементами 17 и роликами 18. На раме 1 закреплен копир 19 в виде замкнутого профиля,совпадающего в плане с профилем направляющих 5 и имеющего плоский 20 и криволинейный 21 участки (фиг.1 и 3), причем последний расположен под стороной 6 направляющих и над питающим транспо тером 3. Около криволинейного участ ка 2 1 копира 19 на раме 1 установлено средство 22 для перемещения захватов в вертикальном направлении На питающем транспортере 3 под криволинейным участком 21 копира 19 установлен механизм 23 отбора в виде транспортера ( фиг.1 и 2 , кинематически связан с приводом питающего транспортера 3. Связь выполнена в виде узких транспортерных лент 24 и шкивов 25 и-26. Шкивы 25 жестко связаны с барабаном 27 механизма 23 отбора (фиг.2J, а шкивы 26 кинематически связаны передачей 28 с приводом ( не показан ) питающего транспортера З.Такое испо нение позволяет при необходимости . останавливать механизм 23 отбора, н останавливая питаюший транспортер 3 Устройство работает следующим . образом. Включаются приводы (не показаны) транспортеров 3 и 4 и привод 1I перемещения кареток 9, а через передачу 28 приводится в движение механизм 23 отбора. Отрезанная заготовка с питающего транспортера 3 через транспортерные ленты 24, соединяю1цие шкивы 25 и 26, поступает на механизм 23 отбора и достигает датчик {не показан ), после чего механизм 23 отбора отключается. Подвижные каретки 9 с захватами 16 перемещаются по направляющим 5 последовательно по их сторонам 6-8 при этом ролики 18 захватов взаимодействуют поочередно с плоскими и криволинейными участками 20 и 21 копира 19. Когда подвижные каретки 9 находятся на сторонах 6 направляющих 5, ролики 18 взаимодействуют с криволинейным участком 21 копира 19 ( .3j: захватывающие элементы 17 захвата 16 приводятся в соприкосновение с полосой корда и захватывают ее. Необходимая траектория движения захватывающих элементов 17, исключающая слипание частей полосы корда, задается формой криволинейного участка 21 копира 19. После захватывания полосы захват 16 поднимает ее над механизмом 23 отбора за счет взаимодействия ролика 18 с криволинейным участком 21 копира 19, а механизм 23 отбора включается. При переходе каретки 9 со стороны 6 на сторону 7 направлякяцих 5 осуществляется поворот полосы корда на 90 в горизонтальной плоскости. Ролик 18 зазсвата 16 в это время начинает взаимодействовать с плоским участком 20 копира 19. Посредством кинематической связи 14 от барабана 15 отборочного транспортера 4 скорость перемещения каретки 9 устанавливается больще скорости ленты отборочного транспортера 4, благодаря чему полоса корда при укладке на него перевора чивается. Если скорость отборочного транспортера 4 больше скорости перемещения каретки 9, переворота полосы корда при ее укладке не происходит. Укладка полосы производится при взаимодействий ролика 18 захвата 16 с плоским участком 20 копира 19
9
при движении каретки 9 по стороне 7 копира 19, при этом часть полосы соприкасается с лентой отборочного транспортера 4, и при постепенном отпускании полосы корда захватывающими элементами I7 она укладывается полностью. За счет указанной раз ницы между скоростями каретки 9 и ленты отборочного транспортера 4 полоса корда расправляется, чем исключается неправильная укладка полос корда.
Во время перекладки полосы осуществляется контроль качества обрезиненной поверхности, что улучшает качество состыкованного корда.Одновременно другая каретка находится на стороне 6 направляющих 5, и захватывается следующая полоса корда, После укладки полосы первая каретка 9 с захватом 16 переходит на сторону 8 направляющих 5 и перемещается к стороне 6 и механизму 23 отбора для захватывания очередной полосы. Цикл повторяется.
При отсутствии полосы корда на механизме 23 отбора в начале взаимодействия ролика 18 захвата 16 с криволинейным участком 21 механизм 2 отбора включен. От сигнала датчика ( не показан ) включается средство 22
936
не давая ролику 18 взаимодействовать с копиром 19, а захватывающим элементам 17 захвата I6 - с механизмом 23 отбора.
Предлагаемое устройство позволяет повысить производительность перекладки за счет безостановочного движения кареток с подвижными захватами, а также улучшить качество стыкованного
корда и освободить рабочих от ручно го переворота полос корда с одной стороны на другую для обеспечения контроля качества обрезиненной поверхности полос с обеих сторон, так
как контроль качества обрезиненных поверхностей полос корда возможный за счет перекладки полосы с одной стороны на другую, позволяет обнаружить брак, выражакицийся в несплошном покрытии поверхностей полосы резиной.
Контроль качества обрезиненных поверхностей не увеличивает время перекладки, а осуществляется в течение перекладки.
По сравнению с базовым объектом, предлагаемое устройство имеет более высокую производительность и позволяет контролировать качество обрезиненной поверхности корда.
28
В ид Л побернуто
1Z
Фиг. 2
Вид5
Ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для отбора и стыковки раскроенного обрезиненного полотна | 1978 |
|
SU740520A1 |
| Солесос | 1922 |
|
SU29A1 |
