Изобретение относится к устройст-. вам для перемещения грузов и может быть использовано для транспортирования грузов цилиндрической формы, 5 снабженных цапфами.
Очень часто при загрузке и выгрузке изделий, например корзин с деталями для печей газовой цементации, пользуются крюками, что не- Q удобно и небезопасно для обслуживающего персонала.
Известен более удобный и безопасный в работе захват, содержащий скобу-подвеску с направляющими паза- с ми в захватной части и поворотными защелками, перекрывающими устье пазов после ввода в них прицепных цапф 1. Однако в таком захвате цапфы ВЫВОДЯТСЯ из пазов при допол- 20 нительном опускании захвата на груз, т.е. требуются два движения на расцепление захвата и груза.
Известен также захват для Грузов с цапфами, содержащий навешиваемый 25 на крюк крана корпус с фигурными вырезами для цапф 2. Этот захват снабжен направляющими клиньями, укрепленными с наружной стороны захва-. та.30
Однако в этом захвате отсутствузт фиксация цапф в пазах, что может привести к самопроизвольному пгщению груза.
Целью изобретения является повышение надежности работы захвата.
Эта цель достигается тем/ что захват снабжен установленным на корпусе с возможностью перемещения вдоль него кожухом, имеющим вырезы, соответствующие вырезам корпуса, и средством для фиксации взаимного положения кожуха и корпуса, выполненным в виде подпружиненного пальца, установленного на корпусе, при этом в корпусе выполнено отверстие под палец.
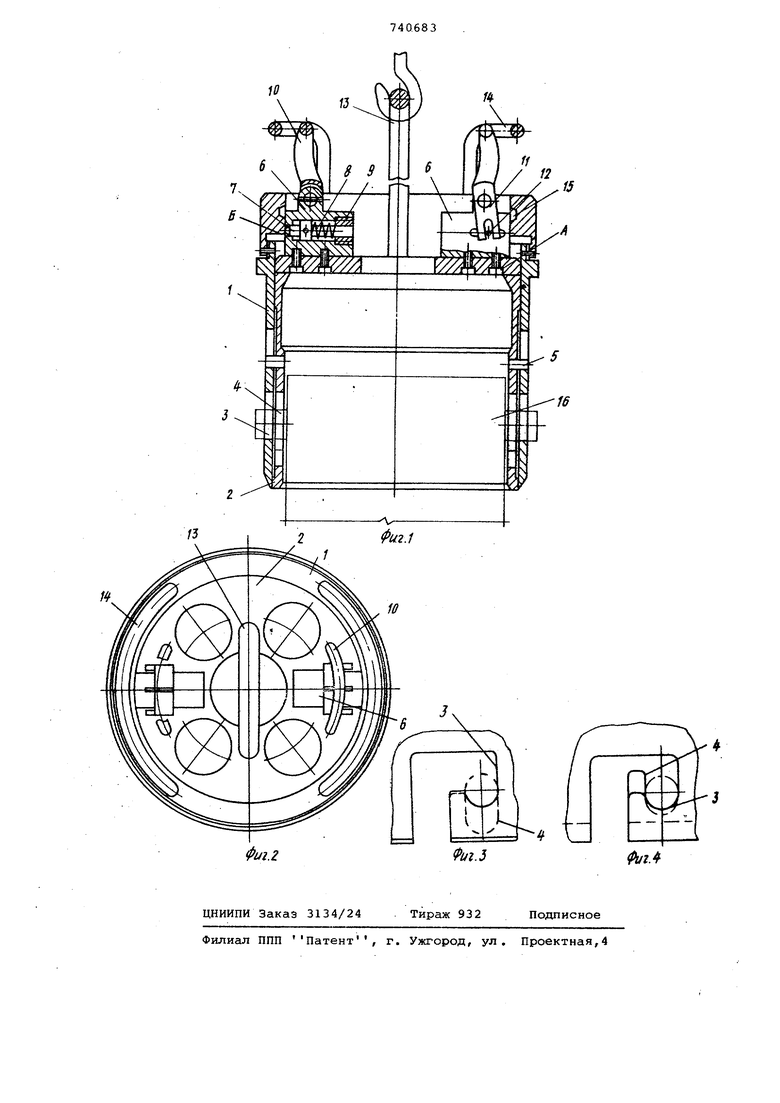
На фиг. 1 изображен предлагаеьмй захват, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - положение вырезов кожуха при надевании захвата на груз; на фиг. 4 - положение вырезов кожуха при транспортировке груза.
Захват состоит из кожуха 1 и корпуса 2 с фигурными вырезами 3 и 4, образующими лапы-крюки под цапфы. Угловое смещение кожуха 1 относительно корпуса исключено штифтами 5.
К торцовой поверхности А корпуса 2 радиально крепят корпуса 6 фиксирующих пальцев 7. Палец 7 и пружина 8 закреплены в корпусе б фиксатора при помощи гайки 9, Вывод пальца 7 производится при помощи рычага 10, взаимодействующего с пальцем через Вилку 11 и штифт 12. Кроме того, на торцовой поверхности А корпуса 2 закреплена скоба 13 для подвешивания устройства с грузом. Кожух 1 имеет две рукоятки 14 для надевания и снятия грузозахватного устройства, а Также конические отверстия 15 для фиксации взаимного положения кожуха корпуса. Передача усилий при транпортировании изделий 16 происходит через торцовую поверхность А корпуса 2 на поверхность Б кожуха
Захват работает следующим образом. .
Оператор при помощи рукояток 14 надевает захват для транспортирования на концевую часть изделия 16 и поворачивает его до полного захода цапф изделия 16 в вырезы 3 и 4. К захвату через скобу 13 подсоединяется крюк грузоподъемного устройства и поднимается сначала происходит перемещение корпуса 2, за счет смещения профилей вырезов цапфы изделия 16 запираются в них.
При достижении торцовой поверхности А корпуса 2 поверхности; Б кожуха 1 происходит фиксация их отноФительного положения при помсхци йальца 7 и начинается собственно подъем изделия 16.
Снятие захвата с изделия, установленного на рабочую позицию, производится следующим образом.
Оператор при помощи рукояток 14 и одновременным нажатием рычагов 10 расфиксирует положения корпуса 2 и кожуха 1 и движением корпуса вниз обеспечивает взаицное расположение вырезов 3 и 4, соответствующих их положению при снятии. Далее угловым перемещением и дальнейшим движением устройства вверх происходит снятие его с изделия.
Предлагаемый захват значительно повышает надежность транспортирования изделий, исключает аварийные
ситуации.
Формула изобретения
Захват для грузов с цапфами, содержаидий навешиваемый на крюк крана корпус с фигурными вырезами для цапф, отличающийся тем, что, с целью повышения надежности его в работе, он снабжен установленным на корпусе с возможностью перемещения вдоль него кожухом, имеющим вырезы, соответствующие вырезам корпуса, и средством для фиксации взаимного положения кожуха и корпуса, выполненным в виде подпружиненного пальца, установленного на корпусе, при этом в кожухе выполнено отверстие под палец.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 281790, кл. В 66 С 1/66, 1970.
2.Авторское свидетельство СССР № 160291, кл. В 66 С 1/66, 1964 (прототип).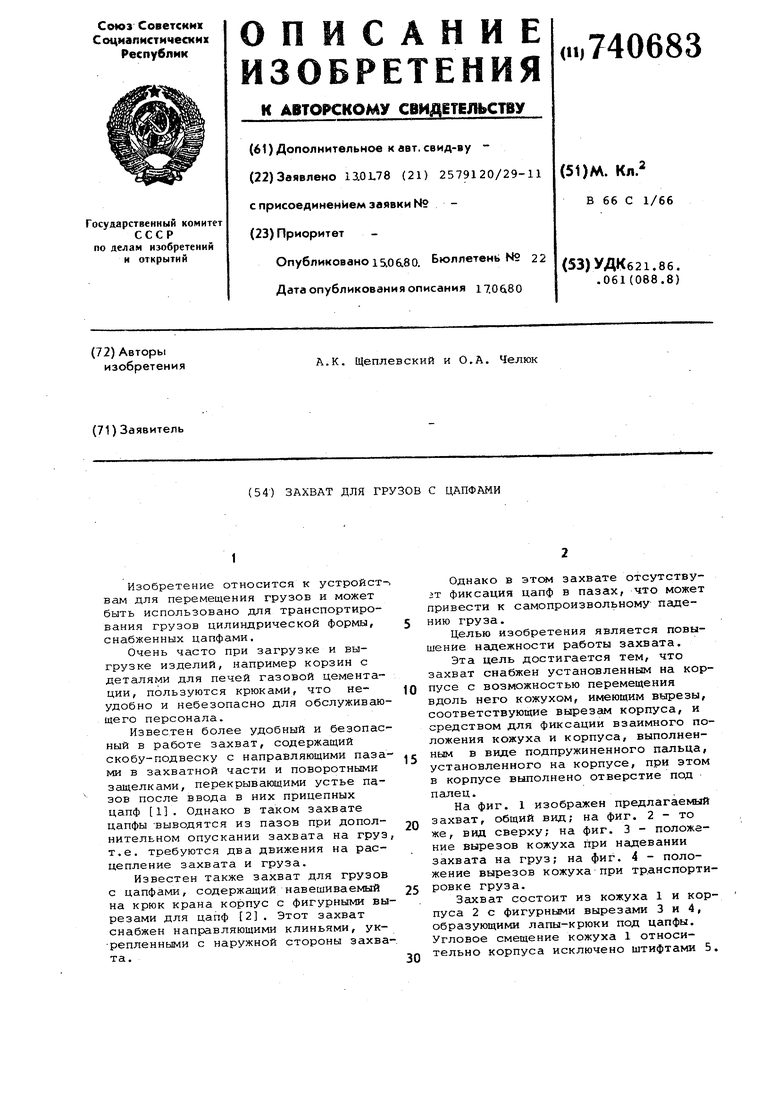
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1980 |
|
SU950657A1 |
| ЗАХВАТ - ПОДВЕСКА | 1990 |
|
RU2030354C1 |
| Силовой тренажер | 1990 |
|
SU1780777A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ШТУЧНЫХ ГРУЗОВ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1990 |
|
RU2013344C1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Захватное устройство для труб | 1974 |
|
SU560812A1 |
| Грузозахватное устройство | 1977 |
|
SU691378A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ ПО ЛЕСТНИЧНЫМ ПРОЛЕТАМ | 2008 |
|
RU2380307C1 |
| Захват-кантователь | 1980 |
|
SU906894A1 |