1
Изобретение относится к металлорежущим станкам и служит для регулирования скорости подачи.
Известна система управления токарно-револьверным станком с преселективным изменением чисел оборотов шпинделя и подач суппортов. Эта система включает в себя источник питания, гидробак, распределительную и контрольно-регулируюшую аппаратуру. Переключение муфт, блоков шестерен, коробок скоростей и подач осушествляётся гидроцилиндрами 1|.
Недостаткомсистемы управления револьверным станком является то, что при небольшом времени, потребном на операцию, (переход) подготовка системы управления к следующему переключении; не своевременна и, кроме того, система управления не обеспечивает последовательную автоматичесзкую работу станка,
Известна также гидравлическая система управления скорости подачи металлорежущего станка, включающая в себя распределительный и вспомогательный ва.лы, соединенные кула;чковой муфтой, исполнительные гидроцилиндры, связанные с насосом через
рс-ч пределители, управляемые кулачками, установленными на распределительном валу, и гидроцилиндр привода программного устройства с распределителем 2 .
Недостатком известной гидросистемы является большая сложность установки программного устройства в заданное положение.
to
Описываемая система управления отличается от известного тем, что она снабжена двухходовым распределителем, связывающим с насосом распре 5 делитель гидроцилиндра привода программного устройства/ трехходовым распределителем, связывающим при повороте вспомогательного вала на требуемый угол управляющую полость
20 двухходового распределителя с насосом, и обратным клапаном, установленным между двухходовым распределителем и распределителями исполнительных гидроцилиндров.
25 Цель изобретения - сокращение времени на регулирование скорости подачи и увеличение степени автоматизации.
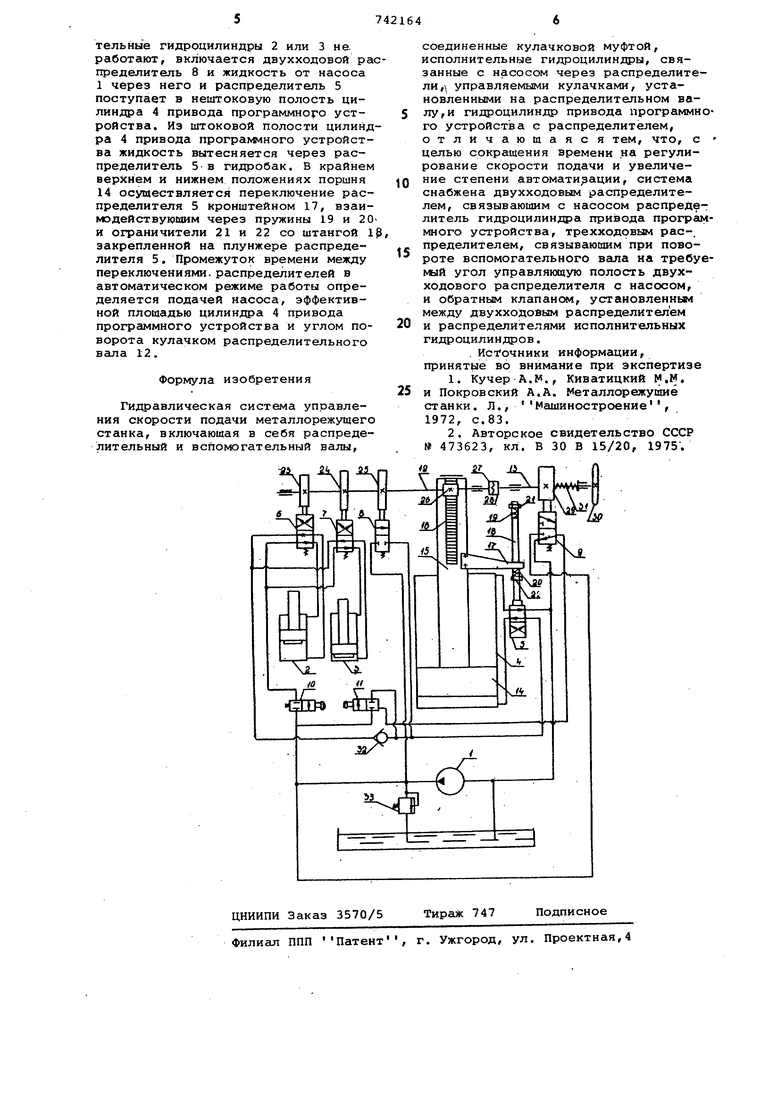
Описываемая система управления
30 изображена на чертеже.
Система управления содержит насос 1, исполнительные гидроцилиндры 2 и 3, цилиндр 4 привода программног устройства, распределители 5-10 и 11, распределительный 12 и вспомогательный 13 валы. Цилиндр 4 привода программного устройства имеет поршень 14, шток 15 с зубчатой рей кой 16 и кронштейном 17, Кронштейн 17 взаимодействует со штангой 18, закрепленной на плунжере распределителя 5 через пружины 19 и 20 и ограничители 21 и 22. На распределительном валу 12 закреплены кулачки 23, 24 и 25, зубчатое колесо 26 и кулачковая полумуфта 27. На вспомогательном валу 13 закреплены кулачковая полумуфта 28, кулачок 29 и махвик 30 задания скорости (подачи). Лолумуфта 28 постоянно прижимается пружиной 31 к полумуфте 27, закрепленой на распределительном валу 12. Для исключения возможности подвода жидкости к распределителям 6 и 7, после включения двухходовых распределителей 11 и 8, система снабжена обратным клапаном 32. Для ограничения повышения давления в системе сверх заданного имеется предохранительный клапан 33. Двухходовой распределитель 10 предназначен для подвода жидкости к распределителям 6 и исполнительных гидроцилиндров 2 и 3. Двухходовой и трехходовой распылители 9 и 11 предназначены длл подвода жидкости от насоса 1 в цилиндр 4 привода программного устройства и схзтановки его поршня при задании требуемой скорости главного движения (подачи). Двухходовой распределитель 8 предназначен для разгрузки насоса 1 в автоматическом режиме работы станка в том случае, когда исполнительные гидроцилиндры 2 и 3 не работают (требуется выдержка времени между операциями или переходами) .
Работа системы управления в ручном режиме осуществляется так.
Перемещением маховика 30 вправо и поворотом его на заданный угол обеспечивается установка кулачка 29 в требуемое положение. Включается двухходовой распределитель 11 и пор шень 14 перемещается вверх. При этом валы 12 и 13 поворачиваются, так как зубчатое колесо 26 сцеплено с зубчатой рейкой 16. При повороте кулачка 29 на заданный угол выступом, имеющемся на кулачке 29, включается трехходовой распределитель 9 и жидкость от насоса 1 поступает в торцовую полость распределителя 11. Двухходовой распределитель 11 переключается, и поршень 14 останавливается в положении , при котором выступ кулачка 23 или 24, подсяйел к плунжеру распределителя 6 или 7 (одлому положению маховика 30 соответствует одно положение распределительного вала) . Система управления подготовлена к включению заданной скорости коробки скоростей (подачи) станка. При включении двухходового аспределителя 10 жидкость от насоса 1 поступает через распределитель 6 или 7 в исполнительный гидроцилиндр 2 или 3. Осуществляется переключение муфты или зубчатого блока в коробке скоростей (подач). При это жидкость из нерабочей.полости исполнительного гидроцилиндра 2 или 3 вытесняется в нештоковую полость цилиндра 4 и поршень 14 перемещается вверх, поворачивая распределительный вал 12, давление жидкости в торцовой полости распределителя 11 падает (это положение фиксируется, например контрольной лампой на щите управления) и оператор убирает руку от кнопки распределителя 10, который под действием пружины выключается. Поворачивают маховик 30 на требуемый угол и включают распределитель 11. Поршень 11 автоматически переметается в требуемое положение, так как выступ кулачка 29 переключает распределители 9 и 11 в нужный момент времени. Если поршень 14 при включении распределителя 11 расположен ниже требуемого положения он переместится вверх и остановится в заданном положении. Если поршень 14 при включении распределителя 11 расположен выше требуемого положения, он переместится вверх, переклют чив распределитель 5 и при перемещении вниз остановится в заданном положении. Так как распределитель 10 в это время выключен, жидкость в исполнительные гидроцилиндры 2 и 3 не подается.
Порядок включения скоростей (подач) всего диапазона станка одинаков
Работа системы управления в автомтическом режиме.
В исходном положении двухпозиционный распределитель 10 всегда включен а распределитель 11 выключен. Кулачковая муфта расцеплена. Жидкость от насоса 1 подается через четырехходовой распределитель 6 в штоковую полость исполнительного гидроцилиндра 2 . Из нештоковой полости исполнительного гидроцилиндра 2 жидкость вытесняется через распределители 6 и 5 в нештоковую пэлость цилиндра 4 привода программного устройства. Порпен 14 перемещается вверх и кулачок 24 распределительного вала 12 переключает четырехходовой распределитель 7. Жидкость от насоса 1 поступает в нештоковую полость исполнительного гидроцилиндра 3. Из штоковой полости жидкость вытесняется через распределители 7 и 5 в нештоковую полость цилиндра 4 привода програкмного устройства и т.д. Когда исполни
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления металлорежущегоСТАНКА | 1979 |
|
SU804355A1 |
| Система управления металлорежущего станка | 1976 |
|
SU680851A1 |
| Система управления металлорежущими станками | 1978 |
|
SU750149A1 |
| Система управления гидравлическимпРЕССОМ | 1977 |
|
SU812602A2 |
| Гидропривод для автоматического управления работой гидроцилиндров пресса | 1983 |
|
SU1139635A2 |
| Система управления гидравлическим прессом | 1977 |
|
SU740531A1 |
| Система управления гидравлическим прессом | 1978 |
|
SU747739A1 |
| Система управления гидравлическим прессом | 1977 |
|
SU725900A1 |
| Система управления металлорежущих станков и автоматических линий | 1977 |
|
SU973295A1 |
| Система управления гидравлическим прессом | 1979 |
|
SU937232A1 |
