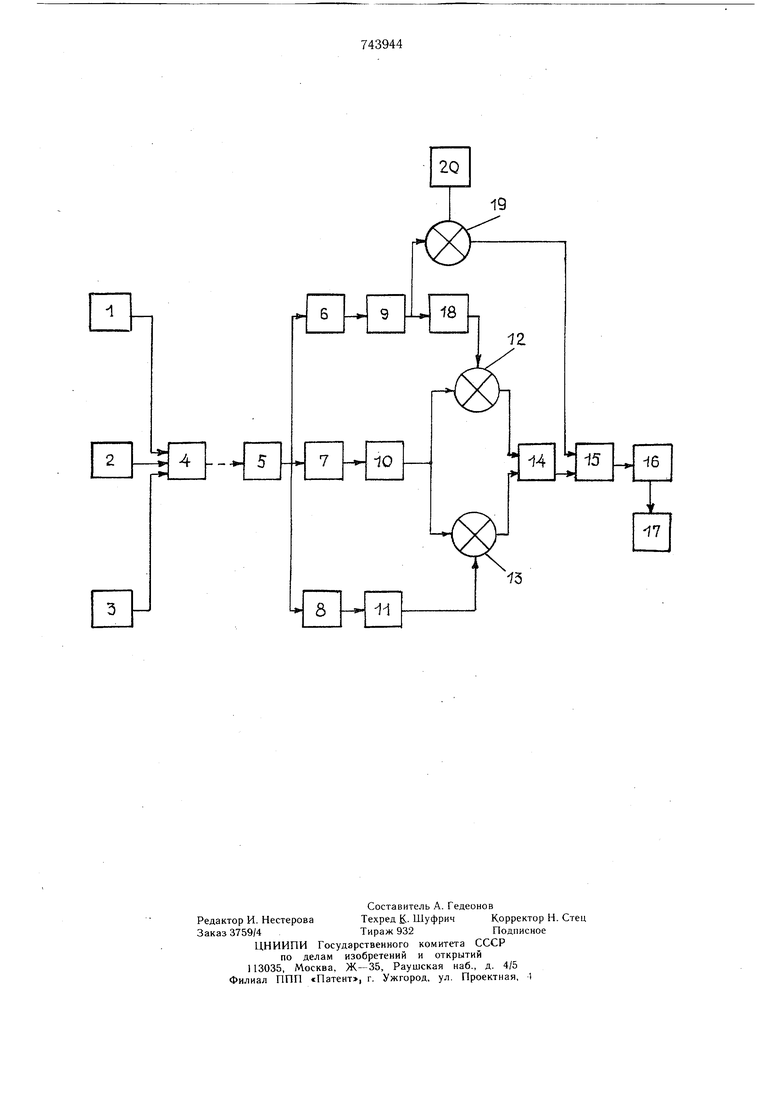
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГРЕЙФЕРНЫМ КРАНОМ Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для управления механизмами кранов, и может быть использовано для управления грейферным краном. Известно устройство для автоматического управления грейферным краном, содержащее датчик положения челюстей грйфера, связанный с исполнительным элементом н схемой управления подъемной лебедкой 1. Известно также устройство для автоматического управления грейферным краном, содержащее датчик усилия замыкающих канатов и датчик положения челюстей грейфера, связанные через блок передачи информации и блок фильтрующих усилителей соответственно с преобразователем датчика усилия замыкающих канатов и преобразователем датчика положения челюстей грейфера, соединенным с формирователем задания, а тажке усилитель мощности, связанный с исполнительным элементом и схемой управления подъемной лебедкой 2. Недостатком известных устройств является отсутствие контроля и выравнивания усилий в подъемных и замыкающих канатах, что приводит к преждевременному износу механизмов и снижению их срока службы. Цель изобретения - повышение срока службы механизмов крана за счет выравнивания усилий в подъемных и замыкающих канатах. Указанная цель достигается тем, что устройство снабжено элементами сравнения, схемами И и ИЛИ, задающим блоком, датчиком усилия подъемных канатов, связанным через блок передачи информации с блоком фильтрующих усилителей, и преобразователем датчика усилия подъемных канатов, вход которого связан с выходом блока фильтрующих усилителей, а выход - со входами первого и второго элементов сравнения, выходы которых через схему И связаны со входом схемы ИЛИ, выход которой соединен с усилителем мощности, причем выход формирователя задания связан со вторым входом первого элемента сравнения, выход преобразователя датчика усилий замыкающих канатов связан со вторым входом второго элемента сравнения, а выход преобразователя датчика положения челюстей грейфера и задающий блок соединены со входами третьего элемента сравнения, выход которого подключен ко второму входу схемы ИЛИ, при этом блок передачи ииформации выполнен в виде передающей и приемной катушек е отверстием для рабочего каната крана. На чертеже изображена блок-схема устройства. Устройство для автоматического управления грейферным крапом содержит датчик 1 положения челюстей грейфера, датчик 2 усилия подъемных канатов и датчик 3 усилия замыкающих канатов, которые через блок передачи информации, выполненный в виде передающей и приемной катущек 4. 5 с отверстиями для рабочего каната крана, связаны с блоком фильтрующих усилителей 6, 7, 8, выходы которых подключены соответственно к преобразователю 9 датчика положения че; юстей грейфера, преобразователю 10 датчика усилия подъемных канатов и преобразователю 11 датчика усилия замыкающих канатов. Датчики 1, 2, 3 выполнены частотными, а преобразователи 9, Ю, 11 предназначены для преобразования частотного сигнала в амплитудный сигнал. Выход преобразователя 10 связан со входами первого и второго элементов 12, 13 сравнения. Выходы элементов 12, 13 сравнения через схему 14 И подключены ко входу схемы 15 ИЛИ, выход которой через усилитель 16 мощности и исполнительный элемент 17 связан со схемой управления подъемной лебедкой (на чертеже не показана). Выходы преобразователя 9 соединены со входами формирователя 18 задания н третьего элемента 19 сравнения, второй вход которого связан с задаюп им блоком 20, а выход - со вторым входом схемы 15 ИЛИ, Выход формирователя 18 задания подключен ко второму входу элемента 12, а выход преобразователя 11 - ко второму входу элемента 13. Устройство работает следующим образом. Частотными датчиками 1, 2 и 3 измеряют соответственно угол между челюстями грейфера, усилие в подъемных и усилие в замыкающих канатах. Сигналы от датчиков передаются на кран с помощью передающей 4 и приемной 5 катушек по одному из рабочих канатов крана. Усилителями 6-8 сигналы разделяются друг от друга и усиливаются. С помощью преобразователей 9-11 производится преобразование частотного признака сигнала в амплитудный. По сигналам датчика 1 формирователем 18 формируется задание на увеличение усилия в канатах подъемной лебедки. Сигнал на выходе формирователя 18 задания появляетсятолько при достижении челюстями грейфера положения, близкого к их полному смыканию, и возрастает по мере смыкания челюстей. Этот сигнал поступает как задание на вход элемента 12 сравнения, на второй вход которого поступает сигнал, пропорциональный усилию в подъемных канатах от датчика 2. Сигнал на выходе элем.ента 12 сравнения появляется в том случае, если сигналы на обоих его входах равны нулю или сигнал, поступающий от датчика 2, меньше сигнала, поступающего от формирователя 18 задания. Сигналы датчиков 2 и 3, пропорциональные усилиям в канатах, соответственно,подъемной и замыкающей лебедок, сравниваются в элементе 13 сравнения. Сигнал на выходе последнего появляется в том случае, если усилие в замыкающих канатах больше усилия в подъемных. Кроме того, сигнал датчика 1, пропорциональный положению челюстей грейфера, поступает на вход элемента 19 сравнения, где сравнивается с заданием, установленным задающим блоком 20, которое соответствует полному смыканию челюстей грейфера. Сигнал на выходе эле.мента 19 сравнения появляется при достижении сигналом, поступающим от датчика 1, положения челюстей грейфера определенного значения, соответствующего полному смыканию челюстей грейфера. Таким образом, до тех пор, пока челюсти грейфера не достигнут положения, близкого к их полному смыканию, сигналы на выходах элементов 12, 19 сравнения отсутствуют, подъемная лебедка включаться не будет, хотя в связи с тем, что смыкание челюстей грейфера в зачерпываемом материале осуществляется замыкающими канатами при ослабленных подъемных, сигнал, поступающий от датчика 3, будет превышать сигнал, поступающий от датчика 2, и на выходе эле.мента 13 сравнения будет сигнал. При достижении челюстями грейфера положения, близкого к их полному смыканию, на выходе формирователя 18 задания появляется сигнал, который возрастает по мере смыкания челюстей грейфера и превыщает сигнал, поступающий от датчика 2. При этом на выходе элемента 12 сравнения появляется сигнал, поступающий на вход схемы 14 И, на второй вход которой поступает сигнал с выхода элемента 13 сравнения. Так как на обоих входах схемы 14 И имеются сигналы, то на его выходе появляется сигнал, поступающий на вход схемы 15 ИЛИ, вгорой вход которой соединен с выходом элемента 19 сравнения. Этот сигнал проходит через схему 15 ИЛИ, усиливается усилителем 16 мощности и приводит в действие исполнительный элемент 17, который включает на подъе.м подъемную лебедку.. Усилие в канатах подъе.уной лебедки возрастает. сигнал, поступающий от датчика 2, увеличивается и становится больше сигнала формирователя 18 задания. Сигнал на выходе элемента 12 сравнения исчезает, подъемная лебедка останавливается. Однако по мере смыкания челюстей грейфера сигнал формирователя 18 задания увеличивается и снова превышает сигнал от датчика 2, что приводит к появлению сигнала на выходе элемента 12 сравнения и включению подъемной лебедки. Так будет продолжаться до тех пор. пока усилие в подъемных канатах не достигнет значения, равного усилию в канатах замыкания, что приведет к изчезновению сигнала на выходе элемента 13 сравнения и на выходе схемы 14 И независимо от наличия сигнала на выходе элемента 12 сравнения и, следовательно, к остановке подъемной лебедки. Однако к этому времени челюсти грейфера полностью сомкнутся,сигнал от датчика положения челюстей грейфера превысит задание, поступающее от задающего бло ка 20, в результате чего на выходе элемента 19 сравнения появится сигнал, который проходит через схему 15 ИЛИ, усиливается усилителем 16 мощности и приводит в действие исполнительный элемент 17, который включает на подъем подъемную лебедку, в результате чего осуществляется переход от зачерпывания в подъему. Формула изобретения Устройство для автоматического управления грейферным краном, содержащее датчик усилия замыкающих канатов и датчик положения челюстей грейфера, связанные через блок передачи информации и блок фильтрующих усилителей соответственно с преобразователем датчика усилия замыкающих канатов и преобразователем датчика положения челюстей грейфера, соединенным с формирователем задания, а также усилитель мощности, связанный с исполнительным элементом и схемой управления подъемной лебедкой, отличающееся тем, что, с целью повыщения срока службы механизмов крана за счет выравнивания усилий в подъемных и замыкающих канатах грейфера, оно снабжено элементами сравнения, схемами И и ИЛИ, задающим блоком, датчиком усилия подъемных канатов, связанным с блоком передачи информации и блоком фильтрующих усилителей, и преобразователем датчика усилия подъемных канатов, вход которого связан с выходом блока фильтрующих усилителей, а выход - со входами первого и второго элементов сравнения, выходы которых через схему И связаны со входом схемы ИЛИ, выход которой соединен с усилителем мощности, причем вы5:од формирователя задания связан со вторым входом первого элемента сравнения, выход преобразователя датчика усилий замыкающих канатов связан со вторым входом второго элемента сравнения, а выход преобразователя датчика положения челюстей грейфера и задающий блок соединены со входами третьего элемента сравнения, выход которого подключен ко второму входу схемы ИЛИ, при этом блок передачи информации выполнен в виде передающей и приемной катушек с отверстием для рабочего каната крана. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 362775, кл. В 66 С 13/48, 20.12.72. 2.„Автоматизированный электропривод, электротехнология и электроснабжение промышленных предприятий. Экспресс-информация Всесоюзного института научной и технической информации. 1973, № 27, с. 13- 15 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления грейферным краном | 1983 |
|
SU1147675A2 |
| Способ управления процессом загрузки грейфера и устройство для его осуществления | 1977 |
|
SU730632A1 |
| Устройство для управления лебедками грейферного крана | 1987 |
|
SU1602848A2 |
| Устройство для управления электроприводами грузовых лебедок грейферного крана | 1986 |
|
SU1426933A1 |
| Устройство для управления лебедками груейферного крана | 1984 |
|
SU1278292A1 |
| Устройство для управления лебедками грейферного крана | 1989 |
|
SU1730021A1 |
| Устройство для управления электроприводами грейферного крана | 1979 |
|
SU965965A1 |
| Устройство для управления асинхронными приводами замыкающей и поддерживающей лебедок грейферного крана | 1981 |
|
SU998310A1 |
| Устройство для управления лебедками грейферного крана | 1986 |
|
SU1370053A1 |
| Грейфер | 1988 |
|
SU1532518A1 |