1
Предлагаемая система относится к автоматике и может быть применена при управлении динамическими объектами.
Наиболее близким по технической сущности к изобретению является система 1, содержащая ключ, измерительный блок, блок задания начальных условий, блок управления и синхронизации и последовательно соединенные логический блок, коммутатор коэффициентов и исполнительный блок, выход которого через объект управления соединен с входом измерительного блока, выходом связанного с вторым входом коммутатора коэффициентов.
Недостаток известной системы заключается в ее малой точности.
Цель изобретения - увеличение точности системы.
Для этого она содержит блоки вычисления функционала, модели объектов управления и модели регулятора, причем выход измерительного блока через последовательно соединенные блок задания начальных условий и ключ соединен с входами моделей объекта управления, выходы которых через соответствующие модели регулятора соединены с их вторыми входами, а через соответствующие блоки вычисления функционала --с входами логического блока, а выход блока управления и синхронизации подключен к второму входу ключа.
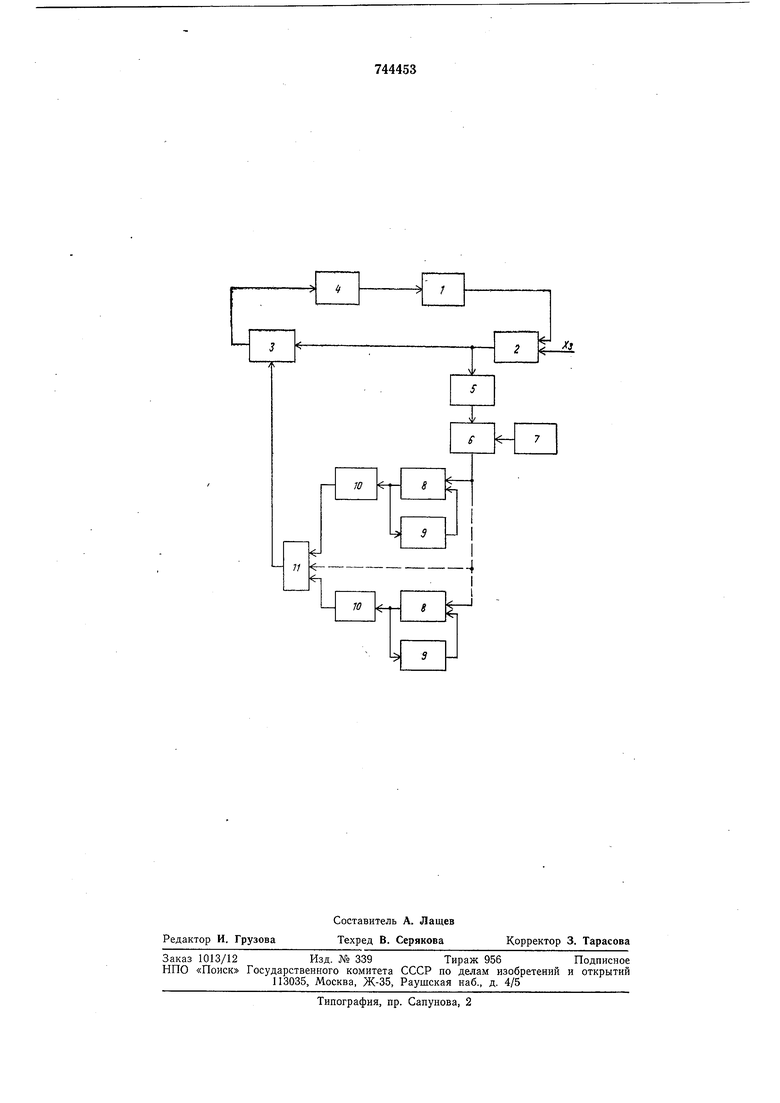
На чертеже представлена блок-схема устройства управления с переменной структурой.. Здесь сделаны следующие обозначения:
5 1 - объект управления, 2 - измерительный блок, 3 - коммутатор коэффициентов, 4 - исполнительный блок, 5 - блок задания начальных условий, 6 - ключ, 7 - блок управления и синхронизации, 8 - модель объекта, 9 - модель регулятора, 10 -блок вычисления функционала, 11 - логический блок.
Устройство управления работает следующим образом.
15 Фазовые координаты объекта 1 управления измеряются и сравниваются с заданными значениями фазовых координат Хз в измерительном блоке 2. Сигнал ошибки, сформированный в измерительном блоке 2,
20 поступает на коммутатор 3 коэффициентов. В нем сигналы ошибки по фазовым координатам-умножаются на соответствующие коэффициенты и суммируются, реализуя закон управления регулятора
25
,
где и - управляющее воздействие; 30Хг - фазовые координаты;
ki - соответствующие коэффициенты.
Коэффициенты ki могут скачкообразно меняться (изменение структуры), тем самым реализуя закон унравления того или иного регулятора. Выход коммутатора 3 коэффициентов соединен с входом исполнительного блока 4, непосредственно управляющего объектом. Для управления коммутацией коэффициентов задаем с помощью блока 5 задания начальных условий и замкнутого ключа 6, управляемого блоком 7 управления и синхронизации, начальные условия на модели 8 объекта, работающие в ускоренном масщтабе времени в режиме прогноза. После этого ключ 6 размыкается, прогнозирующие модели объектов переходят в режим решения, управляясь при этом каждая соответствующей моделью 9 регулятора. В качестве моделей регуляторов используются все варианты законов управления, которые могут быть реализованы блоком коммутируемых коэффициентов.
На интервале времени от начала решения до конца переходного процесса в модели объекта, управляемой моделью регулятора, блок 10 вычисляет некоторый функционал, по которому осуществляется оптимизация. После окончания переходного процесса в последней из моделей объекта логический блок 11 сравнивает значения функционалов на выходах блоков 10 вычисления функционала и осуществляет коммутацию коэффициентов в блоке коммутации коэффициентов так, чтобы реализовать закон управления регулятора той модели объекта, которой соответствовал минимум функционала. После этого цикл повторяется. Таким образом, осуществляется сравнение всех законов управления, которые могут быть реализованы блоком коммутируемых коэффициентов, и выбирается для управления объектом закон управления, с помощью которого для модели объекта обеспечивается минимум заданного функционала.
В качестве функционала может применяться интеграл от квадрата ошибки за время переходного процесса либо время переходного процесса (максимальное быстродействие). Конец переходного процесса можно определить по входу переходного процесса в 5% «трубку. Время цикла следует выбирать как можно меньшим. Блок управления и синхронизации должен обеспечивать работу моделей в режиме задания начальных условий (ключ замкнут) и в режиме решения (ключ разомкнут). В простейшем случае блок может быть реализован на мультивибраторе и работать по жесткой программе. В качестве ключей могут применяться реле. В качестве блока вычисления функционала, для минимума среднеквадратичной ошибки, например, могут использоваться последовательно соединенные квадратор и интегратор, а в качестве модели объекта и регулятора - цепи, собранные на ЛС-цепочках и операционных усилителях. Единственным требованием к моделям регуляторов и регуляторам, реализуемым блоком коммутации коэффициентов, является устойчивость объекта, управляемого данным регулятором (аналогично для модели регулятора и объекта). Законы управления регуляторов, реализуемые
0 блоком коммутации коэффициентов, выбираются аналогично прототипу.
Логический блок может быть реализован в простейшем случае (в блоке коммутируемых коэффициентов реализовано только
5 два закона управления) аналогично блоку формирования функции переключения прототипа с той лишь разницей, что вместо функции 5 используется функция /i-/а, где /1 - значение функционала, обеспечиваемое первым реализованным законом управления (регулятором), /2 - значение функционала, обеспечиваемое вторым законом управления.
Использование новых элементов - прогнозирующих моделей, блоков вычисления функционала, логического блока выгодно отличает предлагаемое устройство управления с переменной структурой от прототипа, так как позволяет оптимизировать систему
управления по заданным критериям. Это дает возможность улучшить качество системы управления, получить переходной процесс, близкий к оптимальному.
Формула изобретения
Система с переменной структурой, содержащая ключ, измерительный блок, блок задания начальных условий, блок управления и синхронизации и последовательно соединенные логический блок, коммутатор коэффициентов и исполнительный блок, выход которого через объект управления соединен с входом измерительного блока, выход которого соединен с вторым входом коммутатора коэффициентов, отличающаяся тем, что, с целью повышения точности системы, она содержит блоки вычисления функционала, модели объектов управления и модели регулятора, причем выход измерительного блока через последовательно соединенные блок задания начальных условий и ключ соединен с входами моделей объекта управления, выходы которых через соответствующие модели регулятора соединены с их вторыми входами, а через соответствующие блоки вычисления функционала- с входами логического блока, причем выход блока управления и синхронизации соединен с вторым входом ключа.
0Источники информации,
принятые во внимание при экспертизе 1. Емельянов С. В. Системы автоматического управления с переменной структурой, М., 1967, с. 304-305 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Квазиоптимальный регулятор | 1976 |
|
SU646308A1 |
| Квазиоптимальный регулятор | 1983 |
|
SU1164664A1 |
| Устройство для моделирования стохастических объектов | 1988 |
|
SU1585803A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Устройство для определения оптимальных траекторий | 1983 |
|
SU1223240A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод | 2024 |
|
RU2835756C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |