I
Изобретение относится к автоматическому управлению и предназначено для использования в цифровых устройствах управления приводом.
Известно устройство -управления приводом, содержащее управлякицее уст ройство, генератор импульсов, схему синхронизации, реверсивный счетчик, сравнивающее устройство, дешифратор, датчик обратной связи, усилитель и двигатель Q.
Наиболее близким к предлагаемому является устройство для программного управления приводом, содержащее усилитель мощности, выход которого подключен ко входу исполнительного двигателя, последовательно соединеннее блок задания программ, peBepcHBieitfi счетчик, блок сравнения и форгшрователь управляющего сигнала, втброй вход которого подключен к выходу дат- чика скорости, а второй вход блока сравнения подключен к выходу датчика положения, формирователь сигнала направления движения, первый элемент И-НБ и последовательно соединенные анализатор ошибки, второй, третий и четвертый элементы И-НЕ, вырсод по-, следиего подключен ко входу усилителя мощности, а второй вход - к выходу первого элемента И-НЕ, подключенного к первому выходу формирователя сигнала направления движения, а вторым вход(Ш - ко второму выходу анализатора овшбки, первый вход которого соединен со входом устройства, а второй вход - с выходом блока сравнения, причем выход датчика скорости подключен ко второму входу формирователя управляющего сигнала и ко входу формирователя сигнала направления движения, соединенного вторым выходом со вторым входом второго элемента И-НЕ. В этом устройстве осуществляет-: ся формирование сигналов форсиров- ки торможения при выбегах .
Недостатком устройства является недостато шая точность из-за того.
то сигнал форсировки торможения ормируется лишь при появлении выега.
Цель изобретения - повышение точости устройства за счет формироваия сигнала форсировки торможения о появления выбега .
Поставленная цель достигается ем, что устройство для программного управления приводом, содержащее последовательно соединенные блок задания программы, блок синхронизации, реве сивный счетчик, первый формирователь импульсов, усилитель и исполнительный элемент, второй вход блока синхронизации подключен к выходу датчика положения исполнительного элемента содержит последовательно соединенные кодовый регистр, блок сравнения, второй формирователь импульсов и элемент И, второй вход которого подключен ко второму выходу блока сравнения, выход - ко второму входу первого формирователя импульсов, первый вход кодового регистра соединен с выходом второго формирователя импульсов, а второй вход - с выходом реверсивного счетчика и вторым . входом блока сравнения.
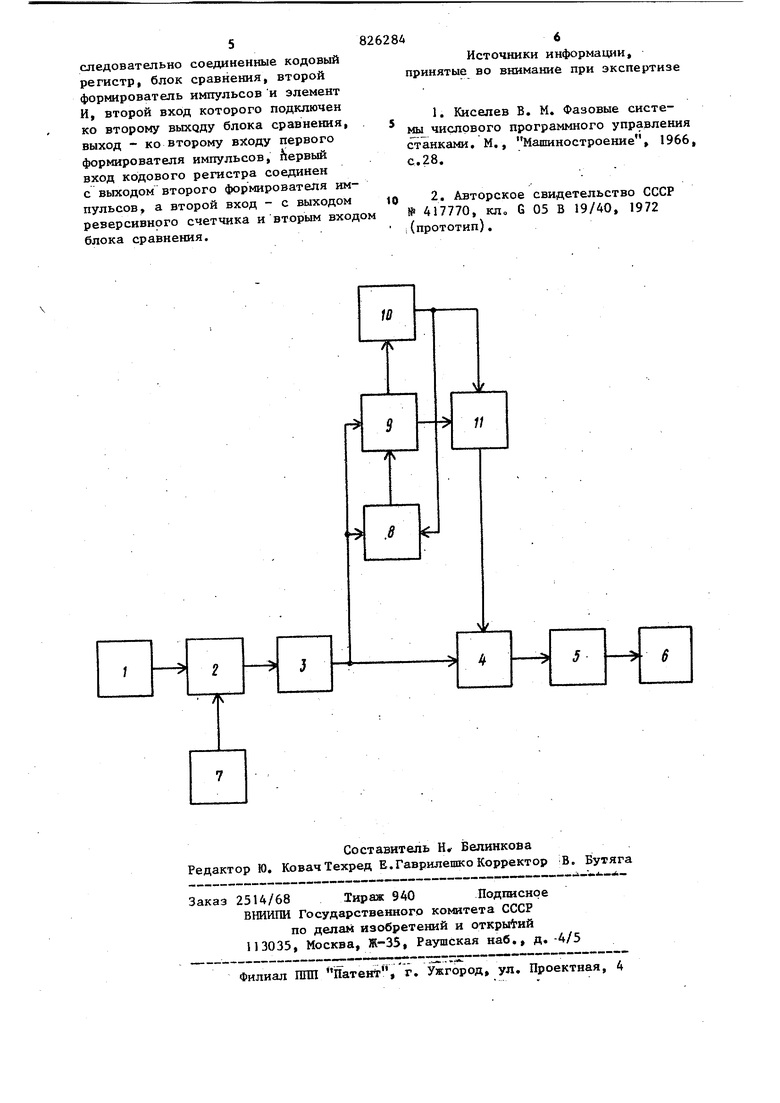
На чертеже представлена блок-схег ма предлагаемого устройства.
Устройство содержит блок I задания программы, блок 2 синхронизации, реверсивный счетчик 3, первьш формирователь 4 имупльсов, усилитель 5 исполнительный элемент 6, датчик 7 положения исполнительного элемента, регистр 8, блок 9 сравнения, второй формирователь 10 импульсов и элемент И 1 1.
Устройство работает следующим образом.
Блок 1 выдает информацию о перемещении в виде последовательности импульсов, поступающих через блок 2 в счетчик 3. Частота следования управлякяцих имупльсов определяет скорость движени} исполнительного механизма. Один импульс соответствует элементарному шагу перемещения. На один элементарный шаг йеремещения исполнительного механизма датчик 7 формирует импульс отработки. Импульсы отработки через блок 2 поступаюу в счетчик 3, уменьшая величину рассогласования, записанного управляющими импульсами. Блок 2 тактирует проходящие через него импульсы таким образом, чтобы они не совпадали
во времени.Код рассогласования со счетчика 3 поступает на формирователь 4, который вырабатывает управляющие импульсы, ширина которых модулируется пропор1;ионально величине рассогласования. Сигнал формирователя 4 через усилитель 5 управляет элементом 6.
Дпя сокращения величины перерегулирования формируется сигнал форсироБки торможения при уменьшении величины рассогласования.
Сигнал форсировки торможения вырабатывается следующим образом.
5 Блок 9 сравнивает коды, записанные в регистре 8 и счетчике 3. Если коды отличаются друг от друга,то блок
9вырабатывает сигнал, который запускает формирователь 10.Задний
0 фронт импульса, снимаемого с формирователя 10, переписывает в регистр 8 код рассогласования со счетчика 3, В результате при любом изменении кода рассогласования формирователь
10формирует импульс. Кроме того, блок 9 при уменьшении кода рассогласования формирует сигн,ал, поступающий на элемент И 11. В этом случае импульс, формируемый формирователем
10, через элемент И И поступает
на формирователь 4, где суммируется с управляюшими импульсами,создавая через усилитель 5 тормозящий момент элемента 6.
Применение предлагаемого устройства позволяет начинать торможение до подхода к заданной точке, что уменьшает величину перерегулирования, за счет чего повьш1ается точность, и исключает необходимость применения датчиков скорости. При этом сохраняется устойчивость работы и большое быстодействие.
Формула изобретения
Устройство ДПЯ программного управления приводом, содержащее последовательно соединенные блок задания программы, блок синхронизации, реверсивный счетчик, формирователь импульсов, усилит ель и испотцштельный элемент, второй вход блока синхронизации подключен к выходу датчика положения исполнительного элемента, отличающееся тем, что, с целью повышения точности устройства, оно содержит по

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1969 |
|
SU475336A1 |
| Устройство для программного управления | 1979 |
|
SU849144A2 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
