блока выход которого соединен с вторым входом первого блока вычитания, .третий вход устройства через дифференциатор связан с первыми входами преобразователя прямоугольных координат в полярные и компаратора, второй вход которого подключен к выходу источника опорного напряжения, первый выход компаратора соединен с управляющим входом ключа и с входом запуска датчика времени, второй выход компаратора подключен к входу сброса датчика времени, выходы первого блока вычитания и датчика времени подключены к соответствующим входам деления, выход которого подключенк первому входу сумматора, второй вход которого соединен с четвертым входом устройства, а выход подключен к второму входу преобразователя прямоугольных координат в полярные, в.ыхсзд аргумента которого и пятый вход устройства подключен к соответствующим входам второго блока вычитания.
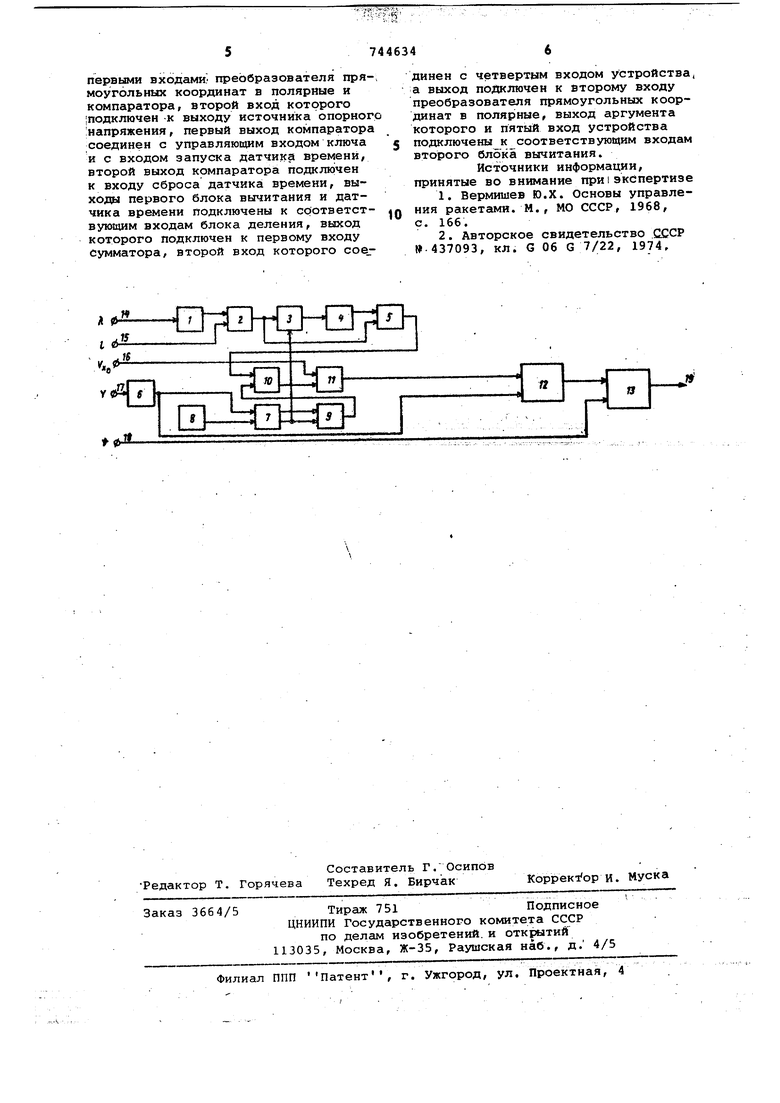
- На чертеже показана блок-схеМа предлагаемого устройства.
Оно содержит косинусный преобразователь 1, блок умножения 2, ключ 3, запоминающий блок 4, .блок вычитания 5, дифференциатор 6, компаратор 7, источник 8 опорного напряжения, датчик 9 времени, блок 10 деления, сумматор 11, преобразователь 12 прямоугольных координат в полярные и блок вычитания 13.
Позициями 14-18 обозначены входы устройст.ва, позицией 19 - выход.
Устройство работает следующим образом.
На входы 14-18 устройства поступают напряжения, пропорциональные координате положения аппарата по глубине У (вход 17) и координате его пространственной ориентации по дифференту (тангажу) v (вход 18), скорости корабля буксировщика УХО(ВХОД 16), дистанции Z (вход 15), углу места буксируемого аппарата (вход
14).. : .; .
Истинная скорость аппарата определяется как сумма скорости корабля буксировщика ;Vxо и дУ;., где V)c соответствует изменению составляющей скорости annatpaTa по оси., х вследствие его перемещений в вертикальной плоскости. Добавка AV;(, определяется путем деления 4S , где 6 Sj соответствует изменению горизонтальной дальности аппарата за время , отсчитываемое от момента t, начала движения аппарата по глубине до момента t выхода его на стационарный режим движения, при котором Vj 0. Для определения 4S служат косинусный преобразователь 1, блок умножения 2, ключ 3, запоминаю11№1й блок 4, блок вычитания 5,соединенные таким обраэом, что напряжение с выхода
множительного устройства, пропорцио-. нальное S tcos, поступает на информационный вход ключа 3, который, закрываясь на время At, обеспечивает запоминание дальности t.to) , в запоминаю.щем блоке 4. Блок внчитания 5 определяет разность )- е с,озЛ(Ъо) .
Для определения промежутка времени служит компаратор 7, который сраба.. тывает в момент, когда Vy О, и за пускает датчик 9 времени, сброс его в нуль осуществляется вторым выходом компаратора 7, напряжение на котором появляется в момент, соответствующий Vy 0.
5 Определение изменения пропорционально 2 составляющей скорости аппарата и осуществляется путем деления лЗна ut в блоке 10 деления. Найденная таким образом добавка uVx, а
0 также скорость корабля буксировщика подаются на вход сумматора 11. С выхода усилителя напряжение, пропорциональное горизонтальной скорости аппарата Vx, подается на один из
5 входов преобразователя 12. С выхода : дифференциатора 6 на другой вход преобразователя поступает величина Vy. С выхода преобразователя 12 снимается напряжение, пропорциональное
Q полярному углу f вектора скорости аппарата..
На выходе блока 13 получается искомый угол атаки, равный разности между углом вектора скорости и углом
дифферента (тангажа) аппарата.
Экономический эффект от Использования изобретения может быть обусловлен возможностью аппаратурного упрощения систем управления буксируемыми аппаратами.
Формула изобретения
Устройство для преобразования прямоугольных координат в полярные, содержащее преобразователь прямоугольных координат в полярные, отличающееся тем, что; с целью повышения точности, устройство содержит косинусный преобразователь, блок умножения, ключ, запоминающий блок, два бл.ока вычитания, суг матор, дифференциатор, источник опорного напряжения, компаратор, датчик времени и блок деления, причем вход косинусного преобразователя соединен с первым входом устройства, а выход - с первым входом блока умножения, второй вход которого соединен с вторцм входом устройства, выход блока умноженйя связан с первым входом первого блока вычитания и через ключ - с входом запоминающего блока, выхОд которого соединен с вторым входом первого блока вычитания, третий вход устройства через дифференциатор связан с
первыми входами; преобразователя пря-, моугольных координат в полярные и компаратора, второй вход которого |подключен к выходу источника опорного :напряжения, первый выход компаратора соединен с управляющим входом ключа и с входом запуска датчика времени, второй выход компаратора подключен к входу сброса датчика времени, выходы первого блока вычитания и датчика времени подключены к соответствующим входам блока деления, выход которого подключен к первому входу Сумматора, второй вход которого coejдинен с четвертым входом устройства, а выход подключен к второму входу преобразователя прямоугольных координат в полярные, выход аргумента которого и пятый вход устройства подключены к соответствующим входам второго блока вычитания.
Источники информации, принятые во внимание приiэкспертизе
1.Вермишев Ю.Х. Основы управления ракетами. М., МО СССР, 1968,
с. 166.
2.Авторское свидетельство СССР №437093, кл. G 06 G 1/22, 1974,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ПРЯМОУГОЛЬНЫХ КООРДИНАТ В ПОЛЯРНЫЕ | 1992 |
|
RU2085995C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2005 |
|
RU2286012C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2240651C1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ | 1987 |
|
SU1568729A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| Устройство для определения угловой скорости синусно-косинусного датчика | 1985 |
|
SU1246116A1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| Устройство для преобразования прямоугольных координат в полярные | 1978 |
|
SU729597A1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
Составитель Г. Осипов Техред Я. Бирчак
Редактор Т. Горячева Заказ 3664/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Корректор И. Муска Тираж 751Подписное ЦНИИПИ Государственного комитета СССР по делам изобретений, и открытий 113035, Москва, Ж-35, Ра т1ская наб., д. 4/5
