(54) СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ КОЛЕСНЫХ ТРАКТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
1
Изобретение относится к сельскому хозяйству, в частности к способам и устройствам для автоматического вождения колесных тракторов.
Известен способ автоматического вождения колесных тракторов с механизмами блокировки управляемых колес в нейтральном положении, включающий контроль отклонения от заданной траектории и выдачу команды на поворот управляемых колес в случае превышения рассогласования над величиной зоны нечувствительности 1.
Известно также устройство для автоматического вождения колесного трактора, содержащее автомат вождения с датчиком изменения траектории движения, распределителем, исполнительным механизмом и механизмом возврата управляемых колес в нейтральном положении 2.
Известные способы и устройства автоматического вождения не позволяют получить высокого качества копирования заданной траектории при вождении полноприводных тракторов, имеющих механизмы блокировки управляемых колес в нейтральном положении межколесных дифференциалов и межосевого привода. При движении с включенными механизмами блокировки увеличивается радиус поворота, ухудшаются маневренность и управляемость трактора, увеличивается поврежденность растений при работе в междурядье.
,Цель настоящего изобретения - повышение управляемости трактора.
Эта цель достигается тем, что после контроля отклонения от заданной траектории подают сигнал на выключение механизмов блокировки, а затем подают команду на поворот, для этого датчик изменения траектории движителя снабжен дополнительным контактом, который подключен к распределителю управления механизмами блокировки, а первый контакт датчика подключен к распределителю управления исполнительным механиз мом.
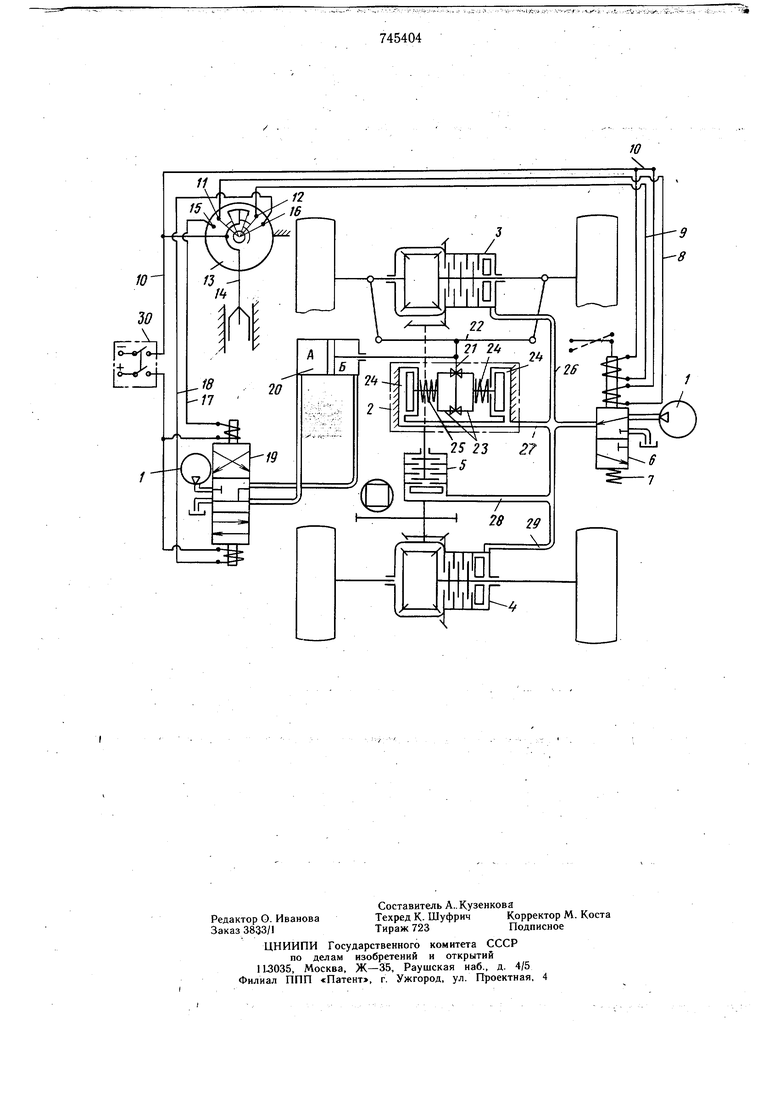
На чертеже изображено устройство для осуществления способа автоматического вождения колесных тракторов с механизмами блокировки управляемых колес в нейтраль20 ном положении.
Устройство состоит из источника давления 1, механизма блокировки 2, автомата вождения, включающего межколесные дифференциалы 3, 4 и межосевой привод 5 (механизм включения переднего моста), распределитель управления механизмами блокировки б с пружиной 7, электроприводов 8, 9, 10, электромагнитов Л и П, контактов 11 и 12 датчика 13 изменения траектории со щупом 14. Контакты 15 и 16 датчика 13 изменения траектории электроприводами 10, 17, 18 соединены с электромагнитами Л и П, управляющими распределителем 19 управления исполнительным механизмом, который гидравлически связан с силовым цилиндром исполнительного механизма 20, имеющим полости А и Б. Шток силового цилиндра исполнительного механизма 20 кинематически связан с тягой 21, которая имеет связь с поперечной тягой рулевого управления 22 и с механизмом блокировки 2 управляемых колес в нейтральном положении.
Механизм блокировки 2 включает упоры 23, связанные с поршнями 24, и пружины 25 возврата управляемых колес в нейтральное положение.
Устройство также включает магистрали 26-29 для подвода рабочей среды и выключатель 30, обеспечивающий подключение электрической части устройства к источнику питания.
Устройство работает следующим образом. При движении на прямолинейном участке контакты 11 и 12, 15 и 16 разомкнуты. Электромагниты Л и П распределителей 6 и 19 при этом выключены. Рабочая среда из силового цилиндра исполнительного механизма 20 через распределитель 19 идет на слив, а через распределитель 6, удерживаемый пружиной 7 в положении «нагнетание, подается в механизмы 2-5 по трубопроводам 26-29 и блокирует их. При воздействии рабочей среды на поршни 24 упоры блокируют тягу 21 в положеНИИ, соответствующем нейтральному положению управляемых колес.
Отклонение щупа 14 в любую сторону на угол меньший а (зона нечувствительности) не вызывает изменений в работе устройства,
При изменении траектории движения, например влево, на угол больщий угла а, (зона нечувствительности для автомата в.ождения) щуп 14, отклоняясь влево, замыкает сначала контакт 12 и включает электромагнит Л распределителя 6. Рабочая среда из механизмов 2-5 по магистралям 26-29 идет на слив. Указанные механизмы разблокируются и не оказывают влияния на поворот трактора. Когда величина изменения траектории движения достигнет величины угла tti, щуп 14 замкнет контакт 16 (при этом контакт 12 тоже замкнут) и включит электромагнит Л распределителя 19. Рабочая среда от источника давления 1 поступает в полость А силового цилиндра исполнительного механизма 20, который через тяги 21,
22 поворачивает управляемые колеса влево. При этом сжимается правая пружина 25, которая при размыкании контакта 16 (окончание поворота) возвращает управляемые колеса в нейтральное положение.
После выравнивания траектории движения щуп 14 размыкает контакт 16, выключая электромагнит Л распределителя 19, а затем контакт 12, выключая электромагнит Л распределителя 6, который пружиной 7 возвращается в положение «нагнетание. Механизмы 2-5 блокируются. Полости силового цилиндра исполнительного механизма 20 в это время соединены со сливом.
Принудительное выключение устройства осуществляется выключателем 30.
Применение предлагаемого способа автоматического вождения колесных тракторов позволит повысить качество копирования заданной траектории движения, улучшить маневренность и управляемость трактора в процессе вождения, уменьщить поврежденность растений при работе в междурядьях.
Формула изобретения
1.Способ автоматического вождения колесных тракторов с механизмами блокировки управляемых колес в нейтральном положении, межколесных дифференциалов и межосевого привода, включающий контроль отклонения от заданной траектории и выдачу команды на поворот управляемых колес, отличающийся тем, что, с целью повыщения управляемости, после контроля отклонения от заданной траектории, подают сигнал на выключение механизмов блокировки, а затем подают команду на поворот.
2.Устройство для осуществления способа по п. 1, включающее автомат вождения, датчик изменения траектории движения с выходным контактом, исполнительный механизм, распределитель управления исполнительным механизмом, распределитель управления механизмами блокировки, отличающееся тем, что, датчик изменения траектории дополнительно снабжен вторым контактом, который подключен к распределителю управления механизмами блокировки, а первый контакт датчика подключен к распределителю управления исполнительным механизмом.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 342567, кл. А 01 В 69/04, 1972 (прототип).
2.Авторское свидетельство СССР № 498924, кл. А 01 В 69/04, 1976.