(5) СТЕРЕОТАКСИЧЕСКИЙ АППАРАТ
1
Изобретение относится к медицинской технике, а именно к нейрохирургическим инструментам.
Известен стереотаксический аппарат, который содержит кольцо с фиксаторами головы, пластинчатую дугу, на которой съемно установлен стереотаксический инструмент. Дуга может вращаться вокруг двух стержней,, лежащих на диаметре дуги. Каретка, О несущая стереотаксический инструмент, установлена на дуге с возможностью перемещения по ней. При любых положениях каретки стереотаксический инструмент расположен ради- 15 ально относительно дуги пластины. Конец стеребтаксического инструмента, длина которого равна радиусу дуги, совмещен с геометрическим центром дуги, лежащем на ее диаметре. 20 Если совместить целевую точку с центром дуги, то, вращая последнюю вокруг стержней и перемещая каретку со стёреотаксическим инструментом по дуге, можно изменять точку хирургического 25 доступа, сохраняя возможноеть потгадания в целевую l .
Однако при использовании аппарата на поверхности головы пациента возникают области, откуда невозможен до- 30
ступ к целевой точке..В частности, такие области расположены на височных поверхностях головы вблизи от стержней. Кроме того, дуга перекрывает операционное поле, следовательно, сужает доступ к нему.
Целью изобретения является обеспе-. чение доступа к височным областям головы.
Поставленная цель достигается тем, что в аппарате дуга имеет длину около 1/4 окружности, на кольце установлен с возможностью перемещения по нему шаровой шарнир со стержнем, на котором подвижно установлена втулка с направляюВДМйдля пластинчатой дуги.
Кроме того, направляющие выполнены в виде коНичёЙКИх ролйков.
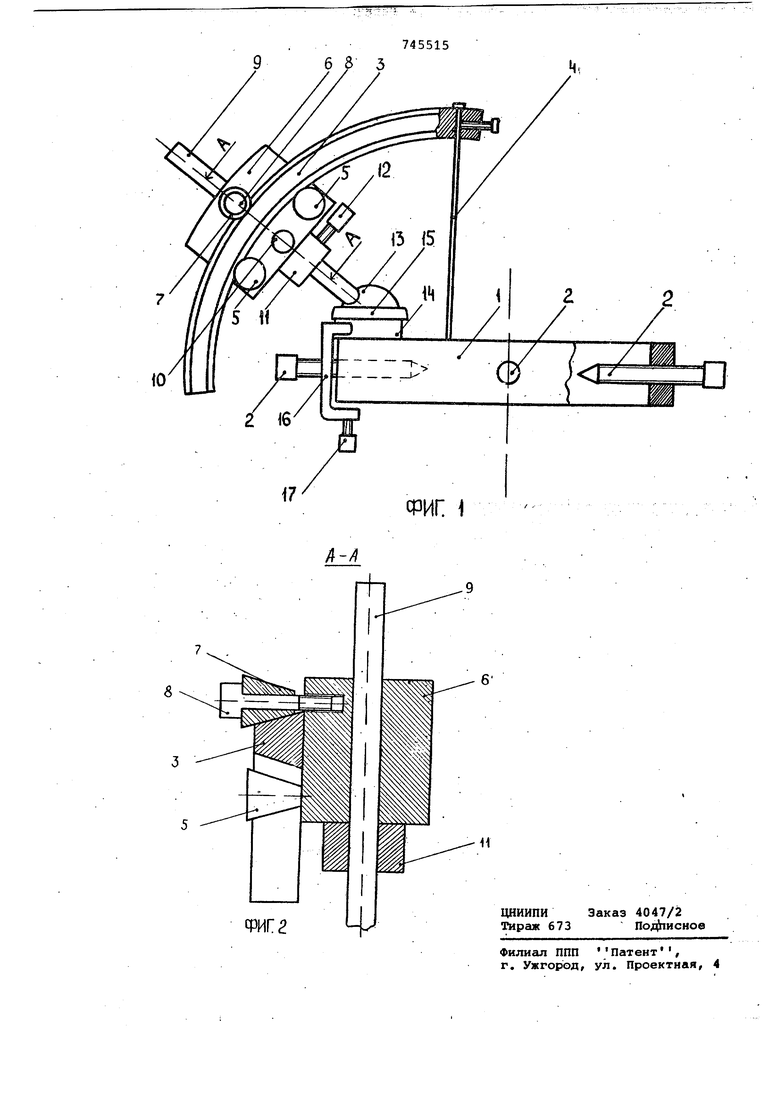
.На фиг. 1 изображен стереотаксический аппарат; на фиг. 2 - разрез А-А на фиг. 1.
Аппарат содержит кольцо 1 с резьбовыми отверстиями, в которые ввинчены фиксаторы 2 головы, выполненнйе в виде винтов с , остриями на концах. Пластинчатая дуга 3, длиной около 1/4 окружности, в направляющее отверстие которой вставлен стереотаксический инструмент. 4, зафиксирована
в направляющих в виде трех конических роликов. Два ролика 5 неподвижно установлены на втулке б, одна из сторон которой выполнена плоской, а третий конический ролик 7 может вращаться вокруг винта 8 и прижиматься к плоской поверхности втулки б путем ввинчивания винта 8 в резьбовое отвестие, выполненное во втулке б. Втулка б установлена на стержне 9 с возможностью вращения вокруг этого стержня и перемещения вдоль него. Втулка б может фиксироваться относительно стержня 9 путем ввинчивания винта 10 в резьбовое отверстие, выпоненное во втулке 6, в результате чего торец винта 10 упирается в стер-. жень 9. Перемещение втулки б вдоль стержня 9 ограничивается стопорным кольцом 11, положение которого относительно стержня 9 фиксируется винтом 12. Стержень 9 соединен с охватываемым звеном 13 шарового шарнира, имеющего три степени свободы. Охватывающее звено этого шарнира состоит из основания 14 и фиксирующей гайки 15. Вместо шарового шарнира может быть использован любой пространственный шарнир, имеющий только две степени свободы. К основанию 14 прикреплена струбцина 16 с фиксирующим винтом 17.
Аппарат работает следующим образом.
Перед погружением стереотаксического инструмента в целевую структуру на голову пациента одевают кольцо 1 и фиксируют его с помощью фиксаторов 2 путем ввинчивания их в резьбовые отверстия кольца до упора острых концов фиксаторов в кости черепа. После этого на кольце 1 в месте, обеспечивающем нужный хирургический доступ, с. помощью винта 17 фиксируют основание 14 в сборе с остальными деталями стереотаксического аппарата за исключением стереотаксического инструмента 4.
С помощью контрастной рентгенографии и стереотаксических расчетов определяют пространственное положение целевой структуры и/ соответствующее ему, положение стержня 9 и стопорного кольца 11. Положение стержня 9 должно быть таким, чтобы его ось проходила через целевую точку, а положение стопорного кольца 11 на стержне 9 должно обеспечивать расстояние, равное радиусу дуги 3 от целевой точки. Найденные положения стержня 9 и стопорного кольца 11 фиксируют с помощью соответственно гайки 15 и винта 12.
После этого в точке оптимального хирургического доступа накладывают трепанационное ртверствие. Далее, поворачивают втулку б вокруг стержня
9 и перемещают дугу 3 по коническим роликам 5 и 7 до совмещения трепанационного отверстия и направляющего отверстия дуги 3. По достижении такого совмещения фиксируют втулку 6 и дугу 3 путем ввинчивания винтов В и 10, а затем вводят стереотаксический инструмент 4 в направляющее отверстие дуги 3 на глубину, равную радиус дуги. В результате этого активный конец стереотаксического инструмента 4 вводится в целевую структуру.
Использование стереотаксического аппарата обеспечивает возможность попадания стереотаксического инструмента в целевую структуру при любом положении стержня, когда целевая точка находится на его оси, отсутствие второго стержня, а также возможность уменьшения вылета дуги позволяют использовать оптимальный доступ для каждой целевой структуры. Благодаря этому снижается травматичность стереотаксической операции, появляется возможность отказаться от использования различных специализированных стереотаксических аппаратов, предназначенных, например, только для введения стереотаксического инструмента в гипофиз.
Трепанационное отверстие и участок головы вблизи от стереотаксического инструмента не перекрыто дугой,что расширяет доступ к one- . рационному полю. Бла.годаря этому улушается обзор операционного поля, облегчаются манипуляции, проводимые хирургом: гемостаз, коагуляция оболочек мозга и т.д., вследствие чего сокращается продолжительность стереотаксической операции.
Формула изобретения
1.Стереотаксический аппарат, содержащий кольцо с фиксаторами головы, пластинчатую дугу,, на которой съемно установлен стереотаксический инструмент, отличающийся тем, что, с целью обеспечения доступа к височным областям, дуга имеет длину около 1/4 окружности, на кольце установлен с возможностью перемещения по нему шаровой шарнир со,стернем, на котором подвижно установлена втулка с направляющими для. пластинчатой дуги.
2.Аппарат по п.1,о т л и ч а ющ и и с я тем, что направляющие выполнены в виде конических роликов.
Источники информации, принятые во внима|1ие при экспертизе
1. Абраков А.В. Основы стереотаксической нейрохирургии. М., 1975, с. 86-87.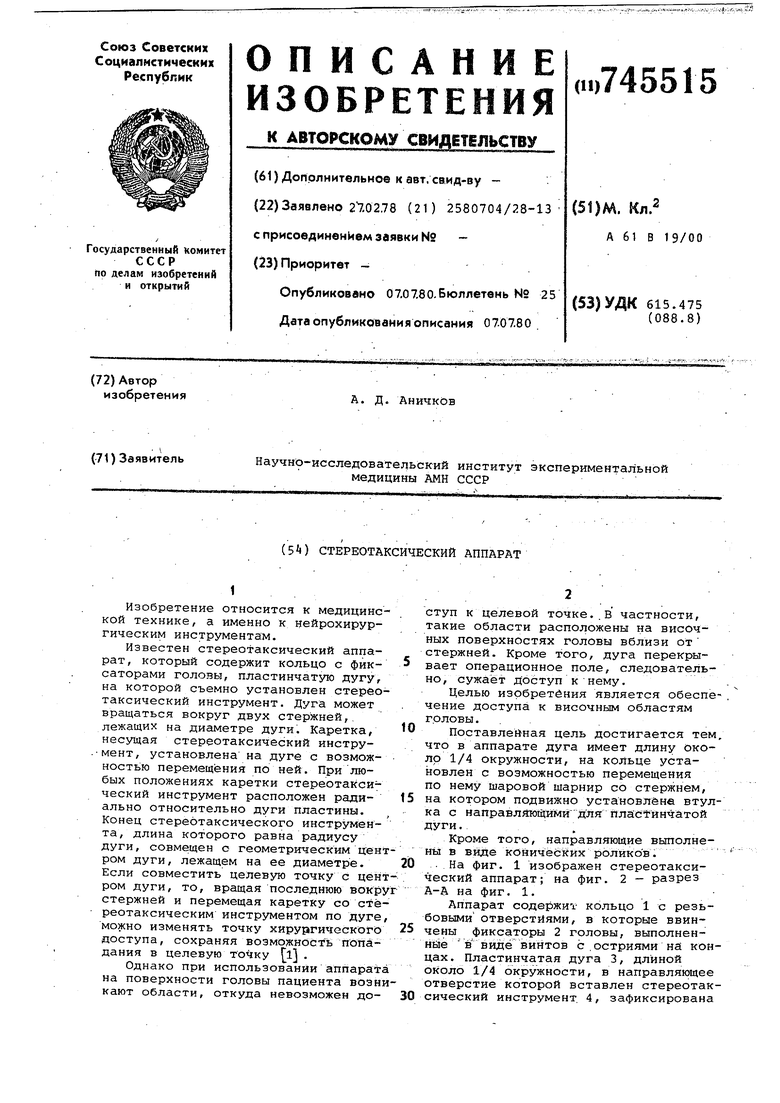
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереотаксический аппарат | 1981 |
|
SU957888A1 |
| СТЕРЕОТАКСИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2218124C1 |
| Стереотаксический аппарат | 1988 |
|
SU1724198A1 |
| Стереотаксический аппарат | 1988 |
|
SU1666093A1 |
| Стереотаксический аппарат | 1981 |
|
SU1055503A1 |
| ОСНОВАНИЕ СТЕРЕОТАКСИЧЕСКОГО АППАРАТА | 1991 |
|
RU2028116C1 |
| Стереотаксический аппарат | 1989 |
|
SU1715339A1 |
| Стереотаксический аппарат | 1980 |
|
SU955916A1 |
| Хирургический зажим для фиксации головы | 1989 |
|
SU1759410A1 |
| Стереотаксический аппарат | 1984 |
|
SU1438755A1 |