(54) СУППОРТ
| название | год | авторы | номер документа |
|---|---|---|---|
| КОПИРОВАЛЬНО-ФРЕЗЕРНЫй СТАНОК | 1972 |
|
SU356054A1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 2011 |
|
RU2475341C2 |
| Суппорт токарного многошпиндельного автомата | 1980 |
|
SU965600A1 |
| ВАЛКОВЫЙ ПРЕСС ДЛЯ БРИКЕТИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2006 |
|
RU2306226C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМЕХАНИЧЕСКОГО УПРОЧНЕНИЯ НАПРАВЛЯЮЩИХ СТАНИНЫ ТОКАРНОГО СТАНКА | 2011 |
|
RU2475342C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПРОЦЕССА РАЗВАЛЬЦОВКИ ТЕПЛООБМЕННЫХ ТРУБ С ПОМОЩЬЮ РОЛИКОВОГО ИНСТРУМЕНТА | 2011 |
|
RU2474483C1 |
| БУРОВАЯ УСТАНОВКА | 2012 |
|
RU2522472C2 |
| Механизм фиксации револьверной головки | 1976 |
|
SU727332A1 |
| МУФТА | 2008 |
|
RU2357128C1 |
| Отрезной суппорт | 1985 |
|
SU1303269A1 |

1
Изобретение относится к станкостроению и может быть использовано в токарных автоматах для тяжелых работ.
Известен суппорт, содержащий нерегулируемый гидравлический двигатеЛь поступательного перемещения и устройство управления подачей, выполненное в виде взаимодействующих с суппортом механических элементов, связанных с кулачковым приводом..
Целью изобретения является расширение технологических возможностей суппорта.
Это достигается тем, что взаимодействующие с суппортом механические элементы выполнены в виде клиновой пары, расположенной в корпусе, закрепленном на направляющих сгппорта,прич%м один из клиньев этойпары сопряжен с призматическими направляющими корпуса и соединен .с гидравлическим двигателем поступательного перемещения, а другой связан с кулачковым приводом, выполнен с углом между рабочими поверхностями, меньшим суммы углов трения по этим поверхностям, и сопряжен через ролики с плоской направляющей, расположенной под углом 2-5° к призматическим направляющим.
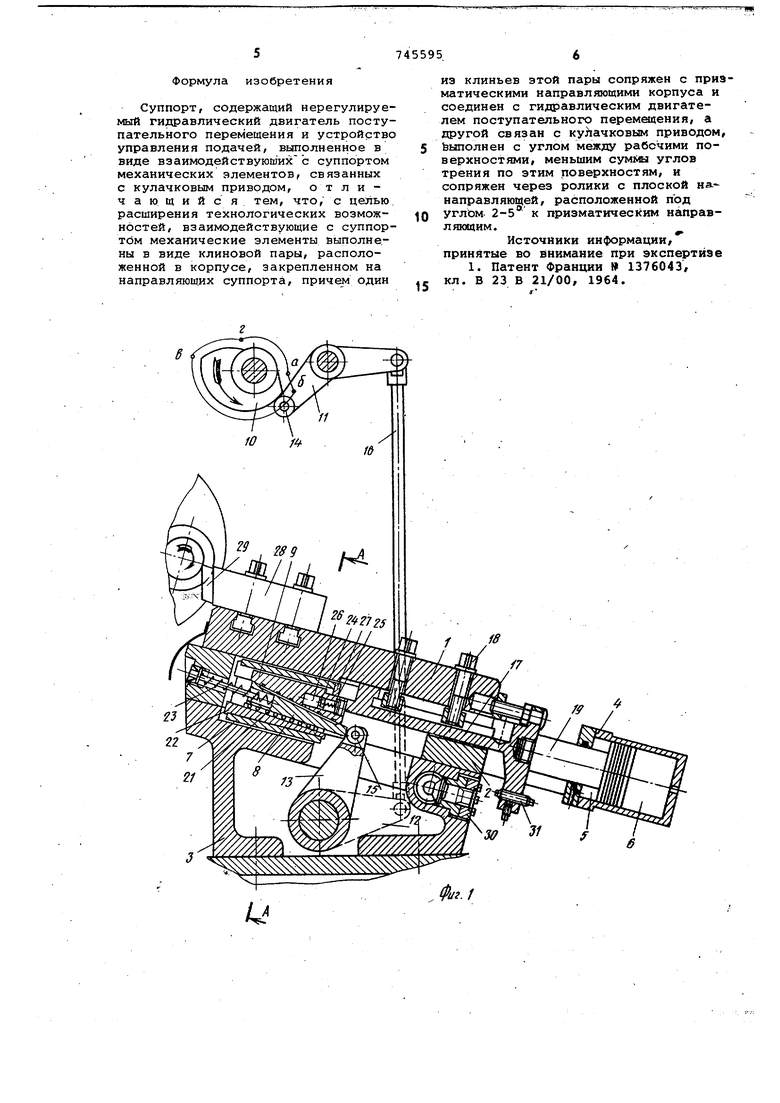
На фиг. 1 изображен предлагаемый суппорт, общий вид; на фиг. 2 - сечение А-А на фиг. Кповернуто); на фиг. 3 - клйновое устройство; на фиг. 4 - многоугольник сил, действующий на ведомый клин; на фиг. 5 10многоугольник сил, действующий на управляющий клин.
Суппорт содержит сгшазки 1, направляющие 2, закрепленные на корпусе 3, гидроцилиндр 4 с рабочими
15 полостями 5 и 6, связанный с направляющими 2, и устройство управления додачей, которое состоит из жесткого корпуса 7, где расположены управляющий 8 и ведомый 9 клинья.
20
Управляющий клин 8 может перемещаться в направлении подачи суппорта кулачковым приводом, состоящим из кулачка 10, рычагов 11 - 13 с роликами 14 и 15 и тяги 16. Ведо25мый клин 9 прижат к управляющему 8 ползуном 17, соединенным с салазками 1 винтами 18, и штоком 19 гидроцилиндра силой, создаваемой давлением масла в полости 6.
JO
Ведо14лЙ клин 9 сопряжец с двумя 1Тризйатическими направляющими 20 . фиг. 2), эакрёпленными в корпусе 7 устройства управления подачей, который крепится К направляющим 2 винтами и штифтами. Управляй- с щий клин 8 с помощью роликов 21 сопряжен с плоской направляющей,22, расположенной под углом 2 - 5 к приэматическим направляющим и закрепленной в корпусе 7. Пружина 23 ... сл5#жй для возврата клиньев 8 и 9 в исходное положение.
Внутри ведомого.клина 9 расположены плунжер 24 и пружина 25, которые служат для подачи смазки из .полости 26 на .рабочие поверхности 15 клиньев. На корпусе 7 закреплен упор 27 для ограничёйия Хода илина 9. Резцедержатель 28 с резцом 29 установлен на салазках 1. В корпусе 3 расположен барабанчик 30 20 с упорами, в один из которых упирается винт 31 в конце рабочего Хбда суппорта 1Ля ограничения его :конечного положения.
При движении клина 9 по призмати- 55 ческим направляющим (см. фиг. 2) коэффициент трения /и соответст-; вующий ему угол трения i. имеют большие значения, чем в случае пе-
С - 1гёНЩе 1ИЯ плоских направляющих гз лЛ , 30
где коэффициент трения в случае ПЛОСКЙХ,направляющих, которому со ответствует угол трения V ; ij - угол между рабочими поверхностями приз-
Матических направляющих).
Увеличение угла трения Vyпозволяет уменьшить силы Р, , Pgs и Р по сравйенйЮ с плоск:йми направляющими
при заданной силе О., создаваемой гйдроцилиндром, что следует из 40
треугольника сил, действующих на клин. . 9 (см. фиг. 3 и 4). Расположение плоской направляющей клина 8 (см. фиг. 3) под углом о/./ 2 -5 к напраВляющим клина 9 приводит к , чтв г1рй перемещении клин:-. 9 на величину АВ ( ДАВС) взаимное перемещение клиньев СВ S АВ f , тяе j - угол между рабочими поверхностями клина 8.СП
Такое выполнение позволяет в нес к5л1ко рай умёньЪ1йть скорость взаим - Й;6т6 с с льжения клиньев по сравнению ебскоростью ведомого клина 9 (при
C/J 2 - 5 ° и oix 7 - 10 ) , что зна: .НО уменьшает расход мощности 55 даТрение и зависимость силы . на взаимодействующих рабочихnoiejpx WSe ic клиньев от скорости суппорта.
Применение роликов 21 позволяет зйачйтельно уменьшить и стабилизиро- go 7вауь силу трения на второй рабочей
поверхности клина 8. Стабилизацйя Ьйл рейнй, а значит и углов трения и % на рабочих поверхностях управляющего клина 8, позволяет боЛёё jj
точ,4О определить угол е/- между рабо iHWH поЁёрхностями клина, который должен быть всегда меньшим суммы углов трения ( V;e 3 ) п° этим повеностям для обеспечения самоторможения клина, но близким к этой сумме с целью уменьшения силы Руи, необходимой для перемещения управляющего клина кулачковым приводом. Велчина силы iPt/n зависит от разности углов , - (А+/З) и, еслио А- + t/ ) , то Руп О, что следует из треугольника сил,действующих на клин В (см.фиг. 5) ,
Перед началом работы салазки 1 находятся.в исходном отведенном положении, ролик 14 расположен на минимальном радиусе кулачка 10, а рычаг 13 в крайнем правом по ложен JIH под действием возвратной пружины (н чертеже не показана); клинья 8 и 9 под действием пружину 23 располож.ены так, что клин 9 своим выступом прижат к упору 27.
Суппорт работает следующим образом. При вращении кулачка ЧО, когда центр ролика 14 проходит точку а, в полость б гидроцилиндра подается масло под давлением и поршень вместе со штоком 19 и салазками 1 начинает перемещаться, а рычаг 13 поворачивается против часовой стрелки и его ролик 14, упираясь в клин 8, перемещает его в направлении подачи суппорта, растормаживая механизм.
После встречи ползуна17 с ведомым клином 9 он прижимает его к управляющему клину 8 с силой, развиваемой гидроцилиндром, и тогда уже движение салазок полностью будет определяться перемещением управляющего клина.
При прохождении центром ролика 14 точки б заканчивается быстрый подвод суппорта и начинается его рабочий ход. После встречи резца с обрабатываемой детальюсила, необходимая для п еремещения клина 8 роликом 15, уменьшается, та как сила, действуюкцая на клин 9 со стороны ползуна 17, уменьшается на величину силы сопротивления.
При подходе центра ролика 14 к тке в регулировочный винт 31 упирается в один из упоров барабанчика 30 и суппорт останавливается. При этом пройсходит выхаживание и зачистка поверхности обрабатываемой детали. -.
Когда ролик 14 находится в точке в, полость 6 гидроцилиндра соединяется со сливом, а в полость 5 подается масло под давлением и ползун 17 вместе с салазками 1 возвращается в исходное положение.
Формула изобретения
Суппорт, содержащий нерегулируемый гидравлический двигатель поступательного перемещения и устройство управления подачей, вьтрлненное в виде взаимодействующих с суппортом механических элементов, связанных с кулачковым приводом, отличающийся тем, что, с целью, расширения технологических возможностей, взаимодействующие с суппортом механические элементы выполнены в виде клиновой пары, расположенной в корпусе, закрепленном на направляющ.их суппорта, причем один Ш
из клиньев этой пары сопряжен с призматическими направляющими корпуса и соединен с гидравлическим двигателем поступательного перемещения, а другой связан с ку}1ачковым приводом, йыполнен с углом между рабочими поверхностями, меньшим суммы углов трения по этим поверхностям, и сопряжен через ролики с плоской нанаправляющей, расположенной под углЬм 2-5 к призматическим направляющим.
Источники информации/ принятые во внимание при экспертизе
