(54) СУППОРТ ТОКАРНОГО МНОГОШПИНДЕЛЬНОГО
АВТОМАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм привода подач суппорта многошпиндельного токарного автомата | 1987 |
|
SU1590201A1 |
| Многошпиндельный токарный станок | 1989 |
|
SU1720801A1 |
| Токарно-винторезный станок | 1981 |
|
SU1160926A3 |
| •СЕСОЮЗНАЯ ffATEHTW-TEXl'i-'JECHAH | 1973 |
|
SU381480A1 |
| Токарный автомат | 1975 |
|
SU524503A3 |
| Устройство для загрузки и разгрузки токарного многошпиндельного станка | 1986 |
|
SU1340976A1 |
| Токарный станок | 1983 |
|
SU1119779A2 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕГО ОТРЕЗАНИЯ КОЛЬЦЕВЫХ ЗАГОТОВОК НА ТОКАРНОМ СТАНКЕ | 1992 |
|
RU2049596C1 |
| ТОКАРНЫЙ ПОЛУАВТОМАТ ДЛЯ ОБРАБОТКИ КОНЦЕВЫХ ЗАГОТОВОК | 1972 |
|
SU331846A1 |
| Устройство к токарно-винторезному станку для нарезания винтовых профилей с непрерывно изменяющимся шагом | 1974 |
|
SU522909A2 |
1
Изобретение относится к станкостроению и может быть использовано на токарных многошпиндельных автоматах.
Известен суппорт многошпиндельного автомата, содержащий салазки, привод поступательного перемещения, включающий рабочий и отводной кулачки, установленные на приводном валу, и толкатель с роликом 1 .
Недостатком известного суппорта является невысокая жесткость и сложность конструкции, обусловленная наличием большого числа стыков в элементах конструк ции.
Цель изобретения - повышение жесткости конструкции и точности обработки.
Для достижения поставленной цели рабочий и отводной кулачки установлены в полости, выполненной со стороны базовой поверхности салазок и закрытой крышкой, а толкатель выполнен в виде рамки, охватывающей приводной вал и закрепленной на салазках с возможностью контакта с выщеуказанными кулачками, причем, с целью регулировки положения кулачков относительно салазок, рамка закреплена на
, 2
салазках с возможностью установленных перемещений.
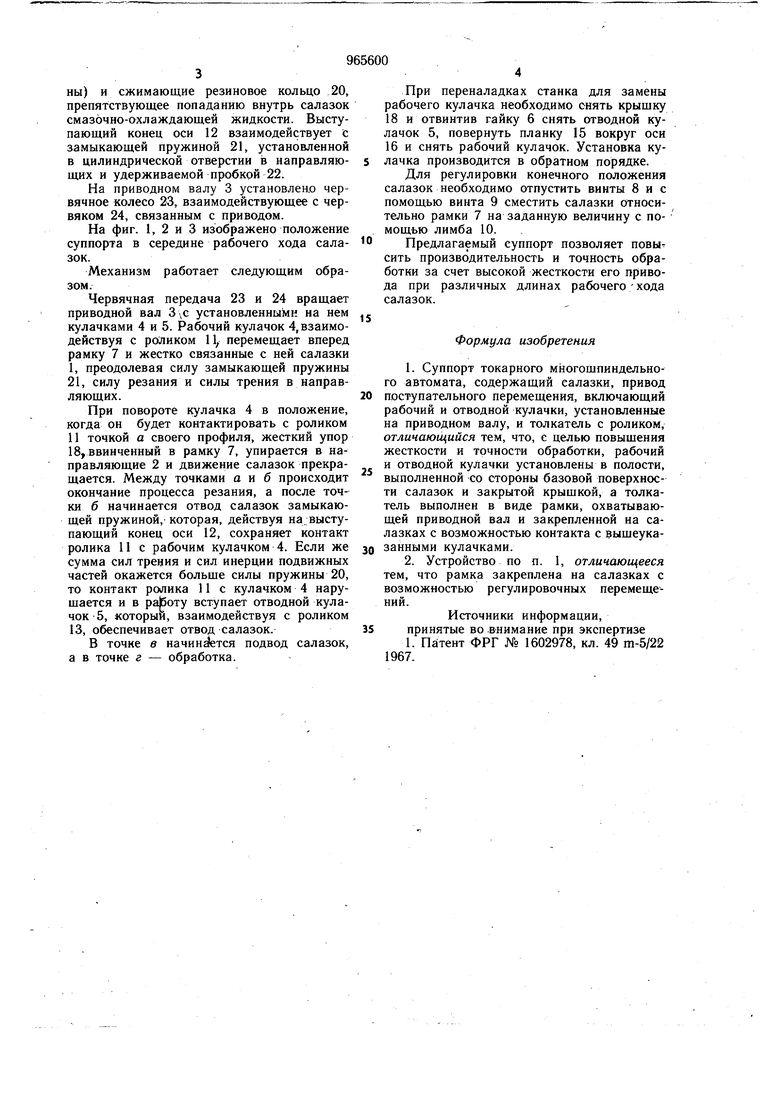
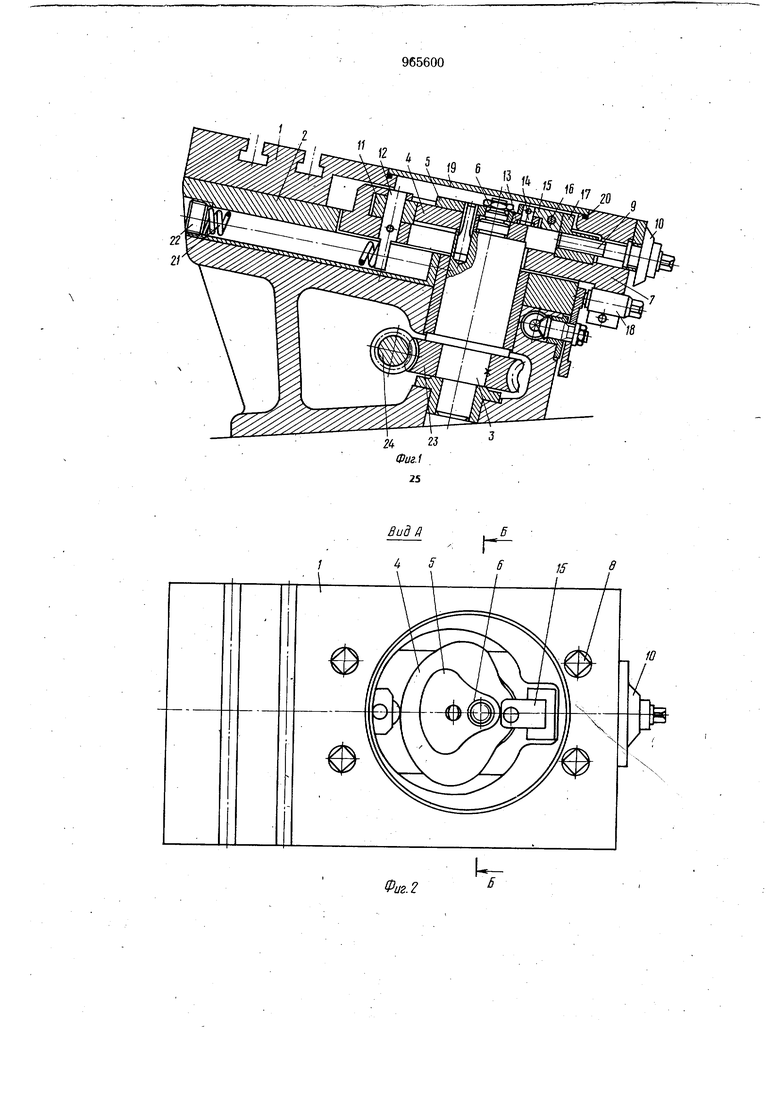
На фиг. 1 представлен суппорт, продольный разрез; на фиг. 2 - вид А на рабочую поверхность салазок прямой кишки; на
5 фиг. 3 - сечение суппорта плоскостью Б-Б на фиг. 2.
Механизм содержит салазки 1 (фиг. 1) с направляющими 2, приводной вал 3, с закрепленными на нем дисковыми рабочим
,Q кулачком 4 и отводящим кулачком 5 с помощью гайки 6, рамку 7, жестко закрепленную на салазках 1 четырьмя винтами 8 ,(фиг. 2) с возможностью переустановки винтом 9, несущим лимб 10. На рамке закреплены ролик 11, вращающийся на двухопор15 ной оси 12 и взаимодействующий с рабочим кулачком 4, а также взаимодействующий с кулачком 5, ролик 13, вращающийся на оси 14, установленной на поворотной планке 15, которая с помощью оси 16 связана с кронщтейном 17, жестко закрепленным на рамке. В рамку ввинчен жесткий упор 18, ограничивающий ее конечное положение.
Отверстие салазок, в котором расположены кулачки 4 и 5, закрыто крыщкой 19, прижатой к салазкам винтами (не показаны) и сжимающие резиновое кольцо 20, препятствующее попаданию внутрь салазок смазочно-охлаждающей жидкости. Выступающий конец оси 12 взаимодействует t замыкающей пружиной 21, установленной в цилиндрической отверстии в направляющих и удерживаемой пробкой 22.
На приводном валу 3 установлено червячное колесо 23, взаимодействующее с червяком 24, связанным с приводом.
На фиг. 1, 2 и 3 изображено положение суппорта в середине рабочего хода салазок.
Механизм работает следующим образом.
Червячная передача 23 и 24 вращает приводной вал 3 ;С установленными на нем кулачками 4 и 5. Рабочий кулачок 4, взаимодействуя с роликом 11, перемещает вперед рамку 7 и жестко связанные с ней салазки 1, преодолевая силу замыкающей пружины 21, силу резания и силы трения в направляющих.
При повороте кулачка 4 в положение, когда он будет контактировать с роликом 11 точкой а своего профиля, жесткий упор 18,ввинченный в рамку 7, упирается в направляющие 2 и движение салазок прекращается. Между точками а ч б происходит окончание процесса резания, а после точки б начинается отвод салазок замыкающей пружиной, которая, действуя на выступающий конец оси 12, сохраняет контакт ролика 11 с рабочим кулачком 4. Если же сумма сил трения и сил инерции подвижных частей окажется больще силы пружины 20, то контакт ролика 11 с кулачком 4 нарушается и в ра)боту вступает отводной кулачок 5, которым, взаимодействуя с роликом 13, обеспечивает отвод салазок.
В точке в начинается подвод салазок, а в точке г - обработка.
При переналадках станка для замены рабочего кулачка необходимо снять крыщку 18 и отвинтив гайку 6 снять отводной кулачок 5, повернуть планку 15 вокруг оси 16 и снять рабочий кулачок. Установка кулачка производится в обратном порядке.
Для регулировки конечного положения салазок необходимо отпустить винты Вис помощью винта 9 сместить салазки относительно рамки 7 на заданную величину с помощью лимба 10.
Предлагаемый суппорт позволяет повысить производительность и точность обработки за счет высокой жесткости его привода при различных длинах рабочего;хода салазок.
Формула изобретения
поступательного перемещения, включающий рабочий и отводной кулачки, установленные на приводном валу, и толкатель с роликом, отличающийся тем, что, с целью повыщения жесткости и точности обработки, рабочий и отводной кулачки установлены в полости, выполненной со стороны базовой поверхности салазок и закрытой крыщкой, а толкатель выполнен в виде рамки, охватывающей приводной вал и закрепленной на салазках с возможностью контакта с рыщеуказанными кулачками.
Источники информации, принятые во внимание при экспертизе
Вид
Б-Б
7 Ш 20 /
