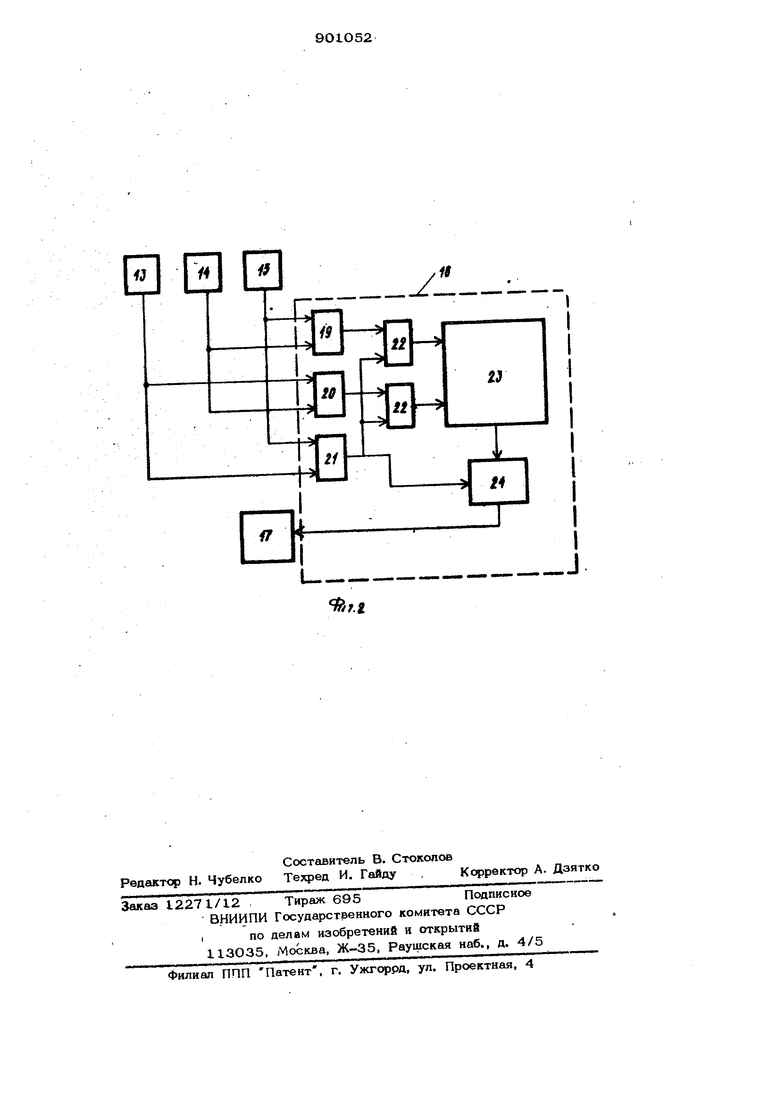
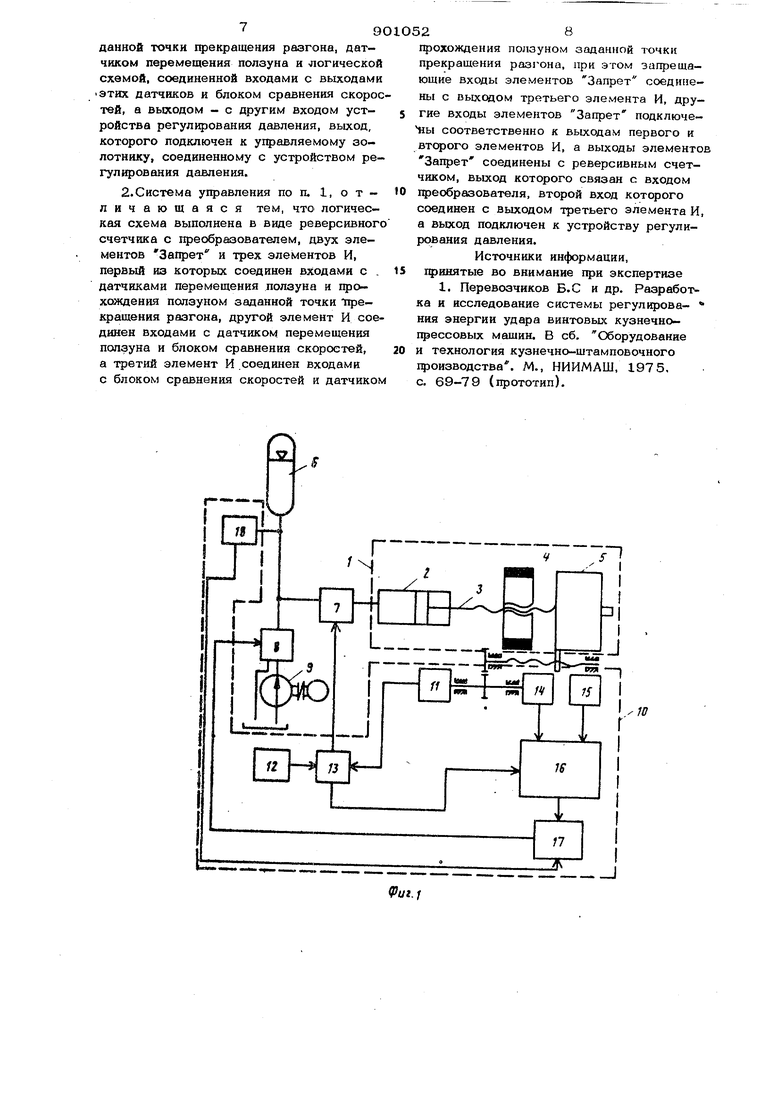
прекращения разгона, другой элемент И соединен входами с датчиком перемещения ползуна и блоком сравнения скоростей, а третий элемент И соединен входами с блоком сравнения скоростей и датчиком прохождения ползуном заданной точки прекращения разгона, при этом запрещающие входы элементов Запрет со динены с выходом третьего элемента И, другие входы элементов Запрет подклю чены соответственно к вь1ходам первого и второго элементов И, а выходы элемен тов Запрет соединены с реверсивным счетчиком, выход которого связан с входом преобразователя, второй вход, которо го соединен с выходом третьего элемента И, а выход подключен к устройству регулирования давления. На фиг. 1 представлена функциональная схема системы управления; на фиг. 2 логическая схема. Гидровидтовой пресс 1 содержит гидр цилиндр 2, винт 3, маховик 4 и ползун 5,а также гидравлический аккумулятор 6,соединенный посредством управляемог золотника 7 с гндроцилиндром 2, а посредством управляемого золотника 8 - с гидронасосом 9. Схема 1О управления прессом содержит датчик 11 скорости, связанный механической передачей с пол зуном 5 пресса, задатчик 12 скорости блок 13 сравнения скоростей, входы которого соединены с задатчиком 12 и датчиком 11, а один из выходов - с управляемым золотником 7. Кроме этог cxeb-ia 1О управлетш содержит датчик 14 переметденткя ползуна и датчик 1 5 прохожд ния заданной точки прекращения разгона Датчики 14 и 15 соединены с входами логической схемы 16. Третий вход схем 16 соединен с блоком 13 сравнения ско ростей. Выход логической схемы 16 сое динен с входом устройства 17 регулирования давления, другой вход которого соединен с датчиком 18 давления. Л огическая схема 16 содержит три логических элемента И 19 - 21. Элемент И 19 соединен входами с датчиком 14 перемещения ползуна и датчиком 15 прохождения ползуном заданной точки прекращения разгона. Элемент И 20 соединен входами с датчиком 14 перемещения ползуна и блоком 13 сравнения скоростей. Элемент И 21 соединен входами с блоком 13 сравнения ско ростей и датчиком 15 прохождения ползуном заданной точки прекращения раз924 она. Кроме этого, имеются. два элемента 22 Запрет, запрещающие вхоиы которых соединены с выходом элемента И 21, а другие входы соединены соответственно с выходами элементов И 19 и 2О. Выходы элементов Запрет 22 соединены с еверсивным счетчиком 23, выход которого соединен с входом преобразователя 24. Второй вход преобразователя 24 соединен с выходом элемента И 21. Выход преобразователя 24 соединен с устройством 17 регулирования давления. Система работает следующим образом. При включении хода разгона осуществляют подачу рабочей жидкости из гидравлического аккумулятора 6 в гидро- цилиндр 2 через управляемый золотник 7. В процессе разгона скорость ползуна постоянно нарастает и контролируется датчиком 11 скорости. При достижении ползуном заданной скорости, когда сигнал с датчика 11 сравнивается с сигналом задатчика 12 скорости, блок 13 сравнения скоростей вьщает команду на отключение золотника 7. Подача рабочей жидкости из гидравлического аккумулятора 6 в .гидроцилиндр 2 прекращается. Дальней- шее движение ползуна до соударения с обрабатываемой заготовкой происходит по инерции. При этом работа системы управления может осуществляться по следующим вариантам. Когда скорость ползуна достигается раньше, чем это необходимо, сигнал с датчика 11 скорости ползуна, достигнув равенства с сигналом задатчика 12 скорости, вызывает появление сигналов на выходах блока 13 сравнения скоростей. Один из них через управляемь й золотник 7 отключает разгон, а другой поступает на логическую схему 16, где попадает на входы логических элементов И 20 и 21. Одновременно с этим сигнал от датчика 14 перемещения поступает на входы элементов И 19 и 20. В результате этого на обоих входах элемента И 2О появляются сигналы, что обеспечивает прохождение импульсного сигнала (пропорционального величине перемещения ползуна) от датчика 14 на вход элемента И 20. Сигнал с выхода элемента 11 40 поступает на вход элемента 22 Запрет. На запрещающих входах элементов 22 Запрет сигнала нет, так как он вырабатывается в том случае, если п; яход элемента И 21 поступают одио)р(.г.1г-нно сигналы от блока 13 сравнения сх;.н;остей 59 и датчика 15 прохождения заданной точки прекращения разгона, т.е. при достижении скорости ползуна в заданном положении. В связи с этим элемент 22 Запрет про пускает импульсный сигнал на вход реверсивного счетчика 23. Счет импульсов производится до момента срабатывания ,датчика 15. При этом на элемент И 21 поступает второй сигнал от датчика 15 (первый поступает раньше от блока 13 сравнения скоростей), в результате чего на выходе элемента И 21 появляется сигнал, который, поступив на запрещающи входы элемента 22 Запрет, прекращает подачу импульсов на вход реверсивного счетчика 23. Одновременно с этим сигна с выхода элемента И 21 поступает на второй вход преобразователя 24 и разрешает подачу сигнала, пропорционального необходимому изменению давления в гидравлическом аккумуляторе, на устройство 17 регулирования давления. С выхода устройства 17 сигнал поступает на управ ляемый золотник 8, который соединяет гидравлический аккумулятор 6 со сливом гидросистемы. Происходит падение давления в гидравлическое аккумуляторе, кото рое контролируется датчиком 18 давления. Если при разгоне ползуна давление в аккумуляторе упало ниже, чем это необходимо, то золотник 8 соединяет акку- мулятор с насосом и происходит подъем давления таким образом, чтобы в очередном цикле работы пресса достижение заданной скорости произошло в заданной точке. Когда скорость ползуна достигается позже, чем это необходимо, на логическую схему 16 поступает сначата сигнал с датчика 15. Поступив на вход элемент И 19, этот сигнал разрешает прохождение импульсов от датчика 14 перемещения на вход элемента 22 Запрет. В связи с тем, что скорость не достигла к этому моменту заданной величины, сигнал блока 13 сравнения скоростей отгсутствует и на запрещающие входы эле ментов 22 Запрет сигнал не подается. В результате, импульсы проходят на вто рой вход реверсивного счетчика 23, что обеспечивает счет импульсов в обратном порядке, въюывая появление напряжения в преобразователе 24 обратного знака по отношению к предыдущему случаю. Счет импульсов производится до момента ера- батьшания блока 13 сравнения скоростей При этом на элемент И 21 поступает второй сигнал от блока 13 (первый поступает раньше от датчика 15), в резуль 26 тате чего на выходе элемента И 21 появляется сигнал, который, поступив на запрещающие входы элемента 22 Запрет, прекращает подачу импульсов на вход реверсивного счетчика 23. Одновременно с этим сигнал с выхода элемента И 21 поступает на второй вход преобразователя 24 и разрещает передачу сигнала, пропорционального необходимому изменению давления в гидравлическом аккумуляторе, на устройство 17 регулирования давления. С выхода устройства 17 сигкеш поступает на управляемый золотник 8, который соединяет гидравлический аккумулятор с гидронасосом. Происходит подъем давления в гидросистеме до тех пор, пока сигнал с датчика 18 давления не становится р 1вным алгебраической сумме сигналов с преобразователя и сигнала, хранящегося в устройстве 17 регулирования давления и пропорционального максимуму давления, возможного .в системе. Когда скорость ползуна достигается в заданной точке прекращения разгона, сигналы от блока 13 сравнения скоростей и 15 поступают на элемент И 21 одновременно. В результате этого на Входы элементов 22 Запрет сразу поступает запрещающий сигнал и поступла- ния импульсов на входы реверсивного счетчика 23 не происходит, а давление в пздравлическом аккумуляторе поднимается до прежнего уровня. Таким образом, система управления гидровинтовым прессом обеспечивает ста бильность и точность дозирования энергии удара и усилия деформирования при изменении факторов, влияющих на эти параметр ь. Экономический эффект от использования системы управления обуславливается повышением точности и стабильности штамповки заготовок на гидровинтовом прессе. Формула изобретения 1. Система управления гндровкнтовым прессом, содержащая гидравлический аккумулятор, св51занный через управляемые золотники с гидроцилиндром прнвода ползуна и устройством регулирования давления, датчик и задатчик скорости ползуна, соединенные с блоком срешнения скоростей, отличающаяся тем, что, с целью повышения стабильности и точности дозирования энергии .удара, она снабжена датчиком давления, соединенным с входом устройства регулирования давления, датчиком прохождения ползуном за- чиком перемещения ползуна и логической схемой, соединенной входами с выходами «этих датчиков и блоком сравнения скорос тей, а выходом - с другим входом устройства регулирования давления, выход, которого подключен к управляемому золотнику, соединенному с устройством регулирования давления. 2.Система управления по п. 1, о т личающаяся тем, что логическая схема выполнена в виде реверсивного счетчика с преобразователем, двух элементов Запрет и трех элементов И, первый из которых соединен вх.одами с , датчиками перемещения ползуна и прохождения ползуном заданной точки прекращения разгона, другой элемент И соединен входами с датчиком перемещения ползуна и блоком сравнения скоростей, а третий элемент И .соединен входами с блоком сравнения скоростей и датчиком прекращения разгона, при этом запрещающие входы элементов Запрет соединены с выходом третьего элемента И, дру- гие входы элементов Запрет подключе ны соответственно к выходам первого и втсрого элементов И, а выходы элементов Запрет соединены с реверсивным счетчиком, выход которого связан с входом гфеобразователя, второй вход которого соединен с выходом третьего элемента И, а выход подключен к устройству регулирования давления. Источники информации, гфинятые во внимание при экспертизе 1. Перевозчиков Б. С и др. Разработка и исследование системы регулирова- ния энергии удара винтовых кузнечнопрессовых машин. В сб. Оборудование и технология кузнечно-штамповочного производства. М., НИИМАШ, 1975, с. 69-79 (прототип).
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидровинтовым прессом | 1977 |
|
SU745706A1 |
| Система управления гидровинтовымпРЕСС-МОлОТОМ | 1976 |
|
SU795968A2 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Гидравлический предохранитель пресс-молотов | 1978 |
|
SU867670A1 |
| Система регулирования натяжения полос | 1980 |
|
SU931254A1 |
| Устройство позиционирования | 1979 |
|
SU798722A1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления прессом | 1978 |
|
SU791556A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1341620A1 |
| Система управления гидровинтовым пресс-молотом | 1975 |
|
SU695844A1 |