(.54) СИСТЕМА УПРАВЛЕНИЯ ГИДРОВИНТОВЫМ ПРЕСС-МОЛОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидровинтовым пресс-молотом | 1975 |
|
SU695844A1 |
| Система управления гидровинтовым прессом | 1977 |
|
SU745706A1 |
| Система управления гидровинтовым прессом | 1977 |
|
SU901052A1 |
| Газогидравлический аккумулятор- МульТиплиКАТОР гидРОВиНТОВОгОпРЕСС-МОлОТА | 1979 |
|
SU829450A1 |
| Гидровинтовой пресс-молот | 1980 |
|
SU1022774A2 |
| ГИДРОВИНТОВОЙ ПРЕСС-МОЛОТ | 1971 |
|
SU303211A1 |
| Гидровинтовой пресс-молот с двусторонним ударом по заготовке | 1974 |
|
SU695758A2 |
| Винтовой пресс-молот | 1975 |
|
SU613923A1 |
| Гидровинтовой пресс-молот | 1976 |
|
SU592617A1 |
| Вертикальный гидровинтовой пресс-молот | 1975 |
|
SU573370A1 |
f
Изобретение относится к обработке металлов давлением и предназначено для управления гидровинтовыми прессмолотами. . .
Известна система регулирования энергии ударов винтовых кузнечно-прессовых машин по скорости, в которой разгон ползуна начинается из исходного положения и по достижении задан ной скорости привод разгона (аккумулятор) полностью отключается и дашь-, нейший путь ползуна до удара по заготовке происходит по инерции l .
Недостатком известного устройства является то, что при устйновке относительно малых значений потребной энергии от момента отключения привода разгона до удара по заготовке ползун проходит значительное расстояние, где скорость падает и ничем не контролируется, что снижает эффективность данной системы.
По основному авт.св. I 695844 известна система управления гидровнятовьи пресс-молотом, в которой дозирование энергии пресс-молота осуществляется установкой определенного хода разгона, т.е. хода рабочего органа (ползуна) с приполом от газогидравлического аккумулятора, при котором
происходит разгон подвижных частей и накапливается требуемая кинетическая Энергия. Изменение хода разгона осуществляется перемещением от специального привода конечного переключателя, дающего команду на включение аккумулятора в соответствии с уровнем энергии, определяемым установкой задающего устройства, сигнал от которого поступает в блок сравнения. В блок сравнения поступают также сигналы от датчика давления и датчика положения конечного переключателя (обратная связь)2j.
Недостатком данной системы, как показали исследования ее работы на экспериментальном прессе, является то, что она не обеспечивает необходимую для точной штамповки стабильност|ь дозирования энергии от удара к удару. Это явление связано с целым рядом факторов, влияющих на конечную скорость ползуна в момент удара (колебания напряжения в сети, изменения коэффициента трения в направляющих ползуна и других узлах пресс-молота колебания давления в аккумуляторе).
Цель изобретения - обеспечение стабильности и точности дозировлния энергии удара.
Поставленная цель достигается тем что система управления ги(ровинтовым пресс-молотом снабжена датчиком скорости, механически связанным с ползуном пресс-молота, и блоком сравнения по скорости, входы которого соответственно соединены с .задатчиком и дат чиком скорости, а выход подключен к электромагниту распределительного устройства привода разгона ползуна Пресс-молота.
Такое выполнение системы управления позволяет добиться высокой стабильности дозирования энергии, так как отключение .привода разгона производится по скорости, а йнергия пропорциональна квадрату скорости рабочего органа. Кроме того, предварителная установка величин хода разгона с учетом давления в аккумуляторе позволяет сократить до минимальной величины .ход по 1зуна после отключения привода, а это гарантирует сохранение заданной скорости и стабиль- ность энергий.
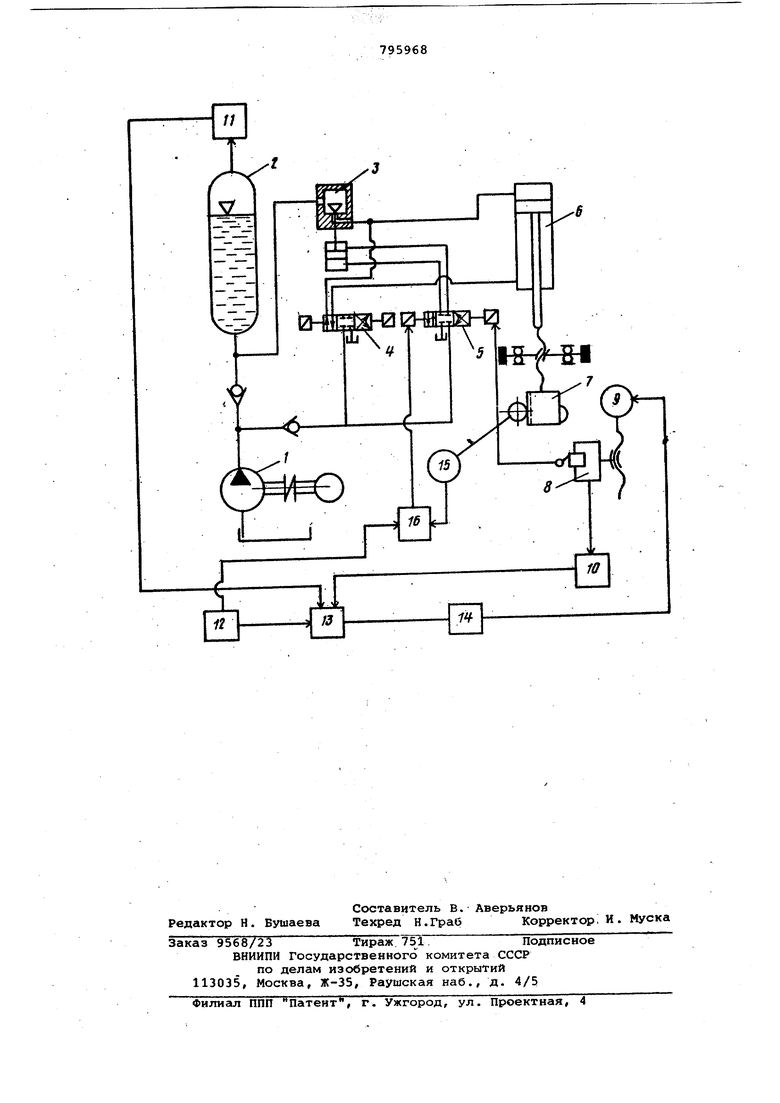
На чертеже представлена схема системы управления гидровинтовым прессмолотом .
Система содержит источник 1 давления, связанный с газогидравлическим аккумулятором 2 с напорным клапаном 3 и с управляющими золотниками 4 и 5 осуществляющими подачу рабочей жидкости в цилиндр 6, связанный с ползуном 7 пресса, прибор 8 путевого контроля, привод 9 перемещения прибора путевого контроля, связанный с датчиком 10 положения прибора путевого контроля, датчик 11 давления газогидравлического аккумулятора, задающее устройство 12, блок 13 сравнения усилитель 14, датчик 15 скорости, блок 16 сравнения по скорости, связанный с электромагнитом управляющего золотника.
Система работает следующим образо
При включении источника 1 давлени происходит подача рабочей жидкости в газогидравлический аккумулятор 2 и управляющие золотники 4 и 5. Золотники 4 и 5, а также напорный клапан 3 находятся в закрытом состоянии. В результате происходит зарядка газогиравлического аккумулятора .2 до рабочего Давления.
Задающим устройством 12 устанавлив ется определенная .энергия удара. ...этом сигнал от задающего устройства поступает в блок 13 сравнения, куда 1}оступают также сигналы от датчика 11 давления и датчика 10 положения . Сигнал рассогласования с блока 13 сравнения поступает через усилитель 14 на привод 9 перемещения датчика 8 путевого контроля. Тем самым происходит установка датчика путевогоконтроля в положение, соответствующее заданной энергии удара. Причем установка задатчика для блока
13 сравнения должна быть несколько больше необходимой энергии удара, чтобы позволить ползуну достичь скорости, соответствующей требуемой энергии до момента удара. Одновременно задающее устройство 12 подает сигнал в блок 16 сравнения по скорости, который равен напряжению датчика скорости, при которой достигается задаваемая энергия удара.
При включении левого электромагн.ита золотника 4 происходит подача жидкости в поршневую полость гидроцилиндра 6, и происходит ход приближения с подачей масла от гидронасоса 1. При достижении ползуном 7 определенного положения контролируемого концевым выключателем 8, включается правый электромагнит золотника 5, в результате чего происходит открытие напорного клапана 3 и рабочая жидкость из газогидравлического аккумулятора 2 поступает в полость цилиндра 6. Начинается период разгона. При
достижении ползуном 7 скорости,, установленной задатчиком 12, сигналы с датчика 15 скорости и задатчика 12 будут равны и блок 16 сравнения по скорости выдает сигнал на переключение золотника 5. Происходит отключение газогидравлического аккумулятора,, и оставшийся до момента деформации путь ползун проходит по инерции. Энергия удара в этом случае определяется
в основном скоростью хода ползуна, что обеспечивает стабильность работы пресса по усилию деформации. После
этого происходит возвратный ход ползуна.
Таким образом, предложенная система обеспечивает стабильность усилия деформации и тем самым - более высокое качество штампуемых поковок, уменьшение количества брака на 10% и повышение срока службы инструмента на 30%.
Формула изобретения
Система управления гидровинтовым пресс-молотсм по авт.св. 695844, о т -л и ч а ю щ а я с я . тем, что, с целью обеспечения стабильности и точности дозирования энергии удара, она снабжена датчиком скорости, механически связанным с ползуном пресс олота, и блоком сравнения по скорости, входи которого соответственно соединены с эадатчиком и датчиком скорости, а выход подключен к электрсмагниту распределительного устройства привода разгона ползуна прессг олота,
Источники информации, принятые во внимание при экспертизе
695844, кл. В.30 В 1/18, 1975 (прототип ).
