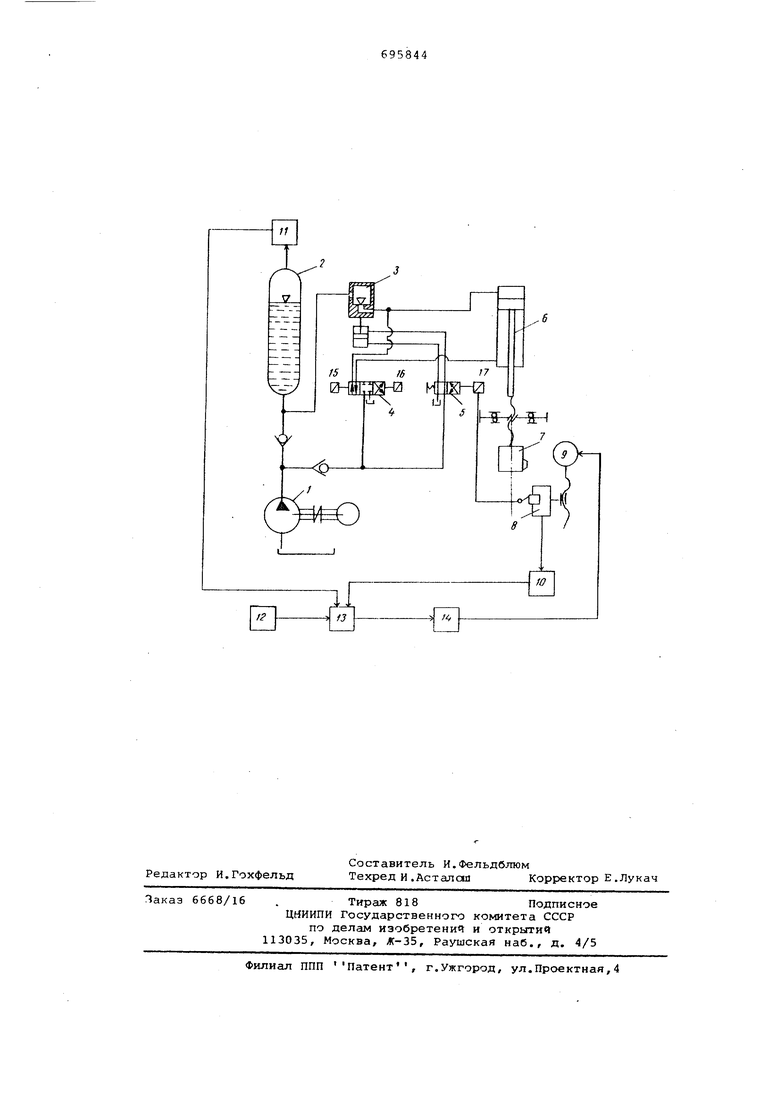
На чертеже представлена схема предложенной системы управления. Она включает в себя насос 1, свя1занный с гаэогидравлическим аккумулятором 2, впускным клапаном 3, распределительныьда золотниками 4 и 5, осуществляюиими подачу рабочей жидкости в цилиндр б, соединенный с ползуном 7„ Кроме того, в системе управления имеется прибор 8 путевого контроля с приводом 9 для его перемещения, связанный с датчиком 10 положения прибора путевого контроля, а также: Датчик 11 давления, задающее устройство 12, блок 13 сравнения, усилитель 14,и электромагниты 15, 16 и 17 управления. Система ущзавлегпия работает следу щим образом. При включении насоса 1 осущестЕ1Ля ется подача рабочей жидкости к гаэогидравлического аккумулятору 2, рг.спределительным золотникам 4 и 5 и в штоковую полость сервопривода впускного клапана 3. При этом происходит зарядка аккумулятора 2, При включени электромагнита 15 жидкость от насоса 1 подается в поршневую полость цилиндра 6, в результате чего ползун 7 опускается. При достижении ползуном определенного положения по команде от прибора 8 путевого контроля включается электромагнит 17, в результат чего за счет подъема поршня сервопри вода открывается впускной клапан 3, и жидкость из аккумулятора 2 поступа ет в рабочий цилиндр 6. Начинается ход разгона, s конце которого происХодит деформирование заготовки. Для подъема ползуна 7 выключаются электр магниты 15 и 17 и включается электро магнит 16, в результате чего клапан 3 закрывается, а жидкость от насоса 1 поступает в штоковую полость рабочего цилиндра 6. Регулировка энергии удара осущест вляется за счет установки в требуемо положение прибора 8 путевого контроля по сигналам, поступаюгцим в блок 13 сравнения от датчика И давления, датчика 10 положения прибора путевого контроля и задающего устройства 12. Выходной сигнал из блока 13 сравнения через усилитель. 14 поступает к приводу 9, который устанавливает прибор 6 в требуемое положение. Предложенная система управления позволяет точно устанавливать величину энергии удара, что повышает качество изделия и стойкость инструмента. Формула изобретения Система управления гидровинтовым пресс-молотом, содержащая газогидравлический аккумулятор и насос, соединенные через распределительную аппаратуру с рабочим цилиндром прессмолота, а также прибор путевого контроля положения ползуна пресс-молота с приводом, отличающаяся тем, что, с целью повышения точности установки величины энергии удара для улучшения качества изделия и повышения стойкости инструмента, она снабжена задающим устройством для установки величины энергии удара, датчиком давления, датчиком положения прибора путевого контроля, а также ком сравнения, при этом выходы задающего устройства и датчиков соединены со входом блока сравнения, а выход блока сравнения - с приводом прибора путевого контроля. Источники информации, принятые во внимание при экспертизе .1. Бочаров Ю.А., Прокофьев В .Н. Гидропривод кузнечно-прессовых машин, М., Высшая школа , 1969, с,233, рис. XII.7. 2. Бочаров Ю.А„ и др. Экспериментальное исследование гидровинтового, пре.сс-молота модели Ф2738 усилием 630 ГС. - Кузнечно-штамповочное .цроизводство 10, 1974, с. 27-30.
ч,
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидровинтовымпРЕСС-МОлОТОМ | 1976 |
|
SU795968A2 |
| Система управления гидровинтовым прессом | 1977 |
|
SU745706A1 |
| Гидровинтовой пресс-молот | 1980 |
|
SU1022774A2 |
| Система управления гидровинтовым прессом | 1972 |
|
SU564451A1 |
| Гидровинтовой пресс-молот с двусторонним ударом по заготовке | 1974 |
|
SU695758A2 |
| Гидровинтовой пресс-молот | 1978 |
|
SU724359A1 |
| КУЗНЕЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2505375C1 |
| Гидровинтовой пресс-молот | 1976 |
|
SU592617A1 |
| КОЛЕННО-РЫЧАЖНЫЙ ПРЕСС С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2010 |
|
RU2425730C1 |
| ГИДРОВИНТОВОЙ ПРЕСС-МОЛОТ | 1971 |
|
SU303211A1 |