(54) МЕХАНИЗМ ДУБЛИРОВАННОГО УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА
/;: :, ;„.. -.-. 1 . ., . ; ;.;; .
Изобретение otHOcHTCH к транспортному машиностроению.
Известен механизм дублированного управлений коробкой передач транспортного Средства, содержащий рычаги непосредственного и дистанционного ручного управления, выполненные с возможностью повррот;з в двух плоскостях, связывающие их приводные тяги н соединительный элемент, связывающий рычаг непосредственного управления с приводными тягами . .
Недостатком этого механизма является то, что создаются высокие удельные давления В месте контакта, что приводит к износу сферы и цилиидрического отверстия стакана, увеличению муфты, потере жесткости системы и как следствие -- нечеткости включения П€ редач.:
: Цель изобретення - повыщение надеж-н эсти срабатывания механизма.
Это достигается тем, что в предложенном механизме, соединительный элемент выполнен в виде управляющего валика, щарнирно соединеиного с рычагом непосредственного управления посредством вспомогательного рычага. Один Из концов управляющего валика снабжен фиксатором рабочего положенин, а другой соединен со вспомогательным рычагом фиксатора транспортного положения.
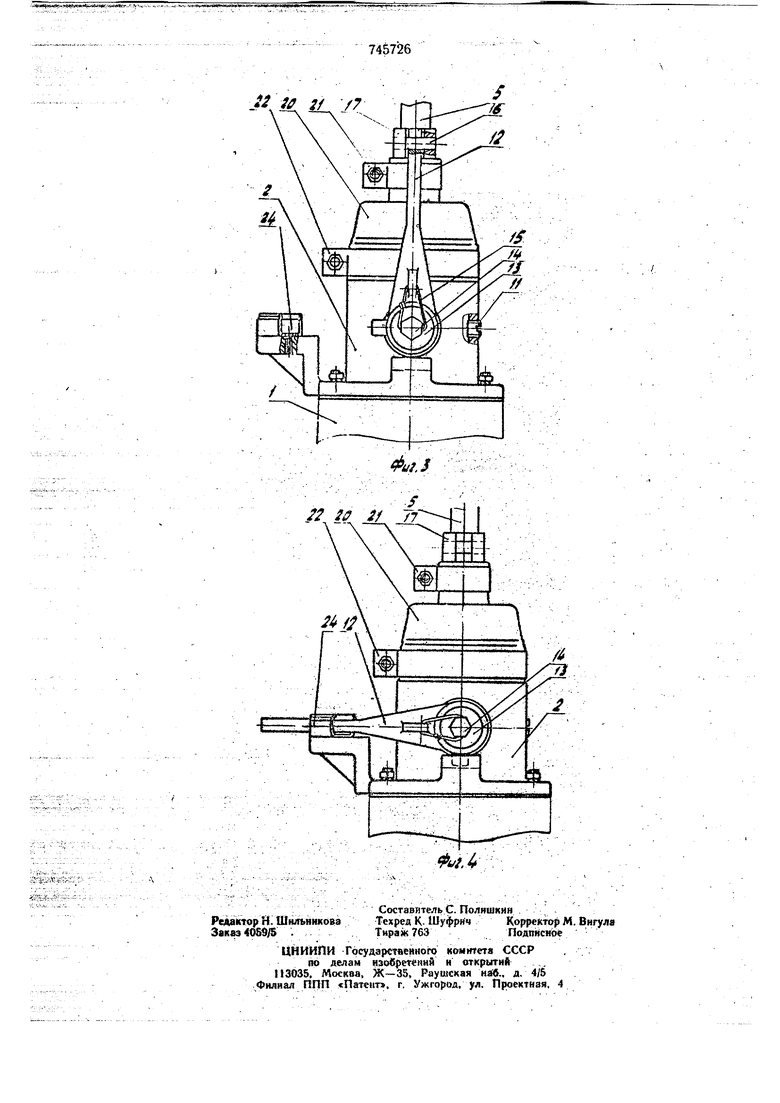
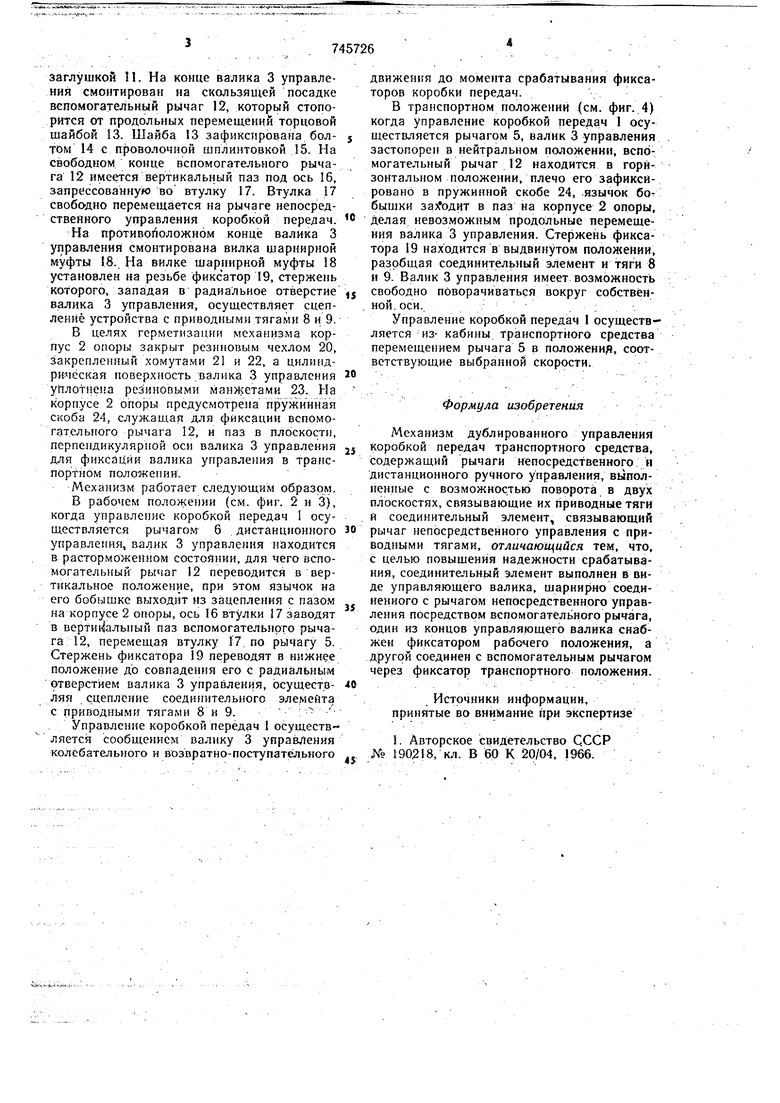
На фиг. i представлена схема предлагаемого механизма; на фиг. 2 и 3 - узел соединения рычага в рабочем положении; на фиг. 4- этот же узел в транспортном положении.
На коробке 1 передач транспортного средства крепится корпус 2 опоры рычага непосредственного управления коробкой
10 передач. Внутри него в опорах скольжения установлен валик 3 управления. На нем с возможностью поворота в двух плоскостях и продольного возвратно-поступательного двнжения шарнирно, с помощью оси 4, укреп 5 лен рычаг 5 непосредственного управления коробкой передач. Рычаг 6 днстанционного ручного управления установлен также с возможностью поворота в двух плоскостях, на щаровой опоре 7. Валнк 3 управления и рычаг 6 связаны между собой щарннрно
26 соединенными тягами 8 и 9. Ось 4 заведена в вилку рычага 5 и радиальное отверстие валика 3 управления через резьбовое отверстие корпуса 2 опоры и зафиксирована шплинтога 10, а резьбовое отверстие закрыто заглушкой П. На конце валика 3 управления смонтирован на скользящей посадке вспомогательный рычаг 12, который стопорится от продольных перемещений торцовой шайбой 13. Шайба 13 зафиксирована болтом 14 с проволочной шплинтовкой 15. На свободном конце вспомогательного рычага 12 имеется вертикальный паз под ось 16, запрессованную во втулку 17. Втулка 17 свободно перемещается на рычаге непосредственного управления коробкой передач. На противоположном конце валика 3 управления смонтирована вилка шарнирной муфты 8. На вилке шарнирной муфты 18 установлен на резьбе фиксатор 19, стержень которого, западая в радиальное отверстие валика 3 управления, осуществляет сцеплениё устройства с приводными тягами 8 и 9. В целях герметизации механизма корпус 2 опоры закрыт резиновым чехлом 20, закрепленный хомутами 21 и 22, а цилиндрическая поверхность валика 3 управления уплотнена резиновыми манжетами 23. На корпусе 2 опоры предусмотрегГа пружинная скоба 24, служащая для фиксации вспомогательного рычага 12, и паз в плоскости, перпендикулярной оси валика 3 управления для фиксации валика управления в трансПортном положении. Механизм работает следующим образом. В рабочем положении (см. фиг. 2 и 3), когда управление коробкой передач 1 осуществляется рычагом 6 дистанционного управления, валик 3 управления находится в расторможенном состоянии, для чего вспомогательный рычаг 12 переводится в вертикальное положение, при этом язычок на его бобышке выходит из зацепления с пазом на корпусе 2 опоры, ось 16 втулки 17 заводят в вертикальный паз вспомогательного рычага 12, перемещая втулку 17. по рычагу 5. Стержень фиксатора 19 переводят в нижнее положение до совпадения его с радиальным отверстием валика 3 управления, Ьсущест.вляя сдепление соединительного элемейта с приводными тягами 8 и 9. :- Управление коробкой передач 1 осуществляется сообщением валику 3 управления колебательного и возвратно-поступательного движения до момента срабатывания фиксаторов коробки передач. В транспортном положений (см. фиг. 4) когда управление коробкой передач 1 осущеста,1яется рычагом 5, валик 3 управления застопорен в нейтральном положении, вспомогательный рычаг 12 находится в горизонтальном положении, плечо его зафиксировано в пружинной скобе 24, язычок бобышки заходиТ в паз на корпусе 2 опоры, делая невозможным продольные перемещения валика 3 управления. Стержень фиксатора 19 находится в выдвинутом положении, разобщая соединительный элемент и тяги 8 и 9. Валик 3 управления имеет возможность свободно поворачиваться вокруг собственной, оси.:. Управление коробкой передач 1 осуществляется из- кабины транспортного средства перемещением рычага 5 в положения, соответствующие выбранной скорости. Формула изобретения Механизм дублированного управления коробкой передач транспортного средства, содержащий рычаги непосредственного, и дистанционного ручного управления, вь1полненные с возможностью поворота в двух плоскостях, связывающие их приводные тяги и соединительный элемент, связывающий рычаг непосредственного управления с прибодными тягами, отличающийся тем, что, с целью повышения надежности срабатывания, соединительный элемент выполнен б виде управляющего валика, шарнирно соединенного с рычагом непосредственного управления посредством вспомогательного рычага, один из концов управляющего валика снабжен фиксатором рабочего положения, а другой соединен с вспомогательным рычагом через фиксатор транспортного положения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Хо 190218, кл. В 60 К 20/04, 1966.
ui.2
,/
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционный маханический привод управления механизмом переключения коробки передач транспортного средства | 1980 |
|
SU874400A1 |
| Механизм дублированного управления коробкой передач портального транспортного средства | 1986 |
|
SU1353675A1 |
| ТРАНСЛЯТОР ТРОСОВОГО ПРИВОДА МЕХАНИЗМА ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2005 |
|
RU2311576C2 |
| УСТРОЙСТВО ДЛИ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СТУПЕНЧАТОЙ МНОГОХОДОВОЙ КОРОБКОЙ ПЕРЕДАЧ | 1968 |
|
SU220062A1 |
| Коробка передач транспортного средства | 1979 |
|
SU929489A1 |
| Устройство отбора мощности от двигателей | 1973 |
|
SU472069A1 |
| Трактор | 1975 |
|
SU1025570A1 |
| КОРОБКА ОТБОРА МОЩНОСТИ СНЕГОБОЛОТОХОДА (ВАРИАНТЫ) | 2024 |
|
RU2832362C1 |
| ТРАНСМИССИЯ СНЕГОХОДА | 2022 |
|
RU2794007C1 |
| Дистанционный привод управления механизма переключения передач | 1985 |
|
SU1270036A1 |