Изобретение относится к устройствам для Дистанционного управления ступенчатой мно oxoдoвoй коробкой передач, в оснойном трйнспортйых средств, н более конкретно - к устройствам, содержащим рычаг ручного Правления, установленный с возможностью вращения в приблизительно взаимно перпендикулярных плоскостях.
Известны устройстёа такого типа с двумя рычагами механизма переключения передач, установленными на коробке передач, один ил koTopbix предназначен для выбора хода, а Другой - Для включения соответствующей Передачи, и двумя кинематическими пенями, связывающими рычаг ручного управления с рычагами механизма переключения передач, включающими в себя шарнирно соединенные рычаги и тяги, с осью вращения ведущего звена одной кинематической цепи, расположенной в одной из плоскостей вращения ры чага ручного управления, и осью вращения ведущего звена другой кинематической цепи, скрещивающейся с осью вращения ведущего звена первой кинематической цепи, pacnOvTOЛченной в плоскости вращения ведущего звена первой кинематической цепи.
Особенностью описываемого устройства является то, что рычаг ручного управления установлен на шарнире, несомом ведущим звеном первой упомянутой кинематической цепи.
причем ось этого шарнира, скрещивающаяся с осью вращения этого звена, расположена в плоскости, перпендикулярной оси вращения звена; рычаг ручного управления снабл ен
выступом с шаровой головкой, расположенным вдоль стержня рычага по другую сторону от его шарнира, причем расстояние между осью шарнира рычага ручного управления и центром шаровой головки предпочтительно
равно расстоянию между осью вращения этого шарнира и осью вращения звена его несущего, а ведущее звено второй упомянутой кинематической цепи снабжено вилкой, взаимодействующей с шаровой головкой выступа
рычага ручного управления.
Такое выполнение устройства увеличивает надежность его работы.
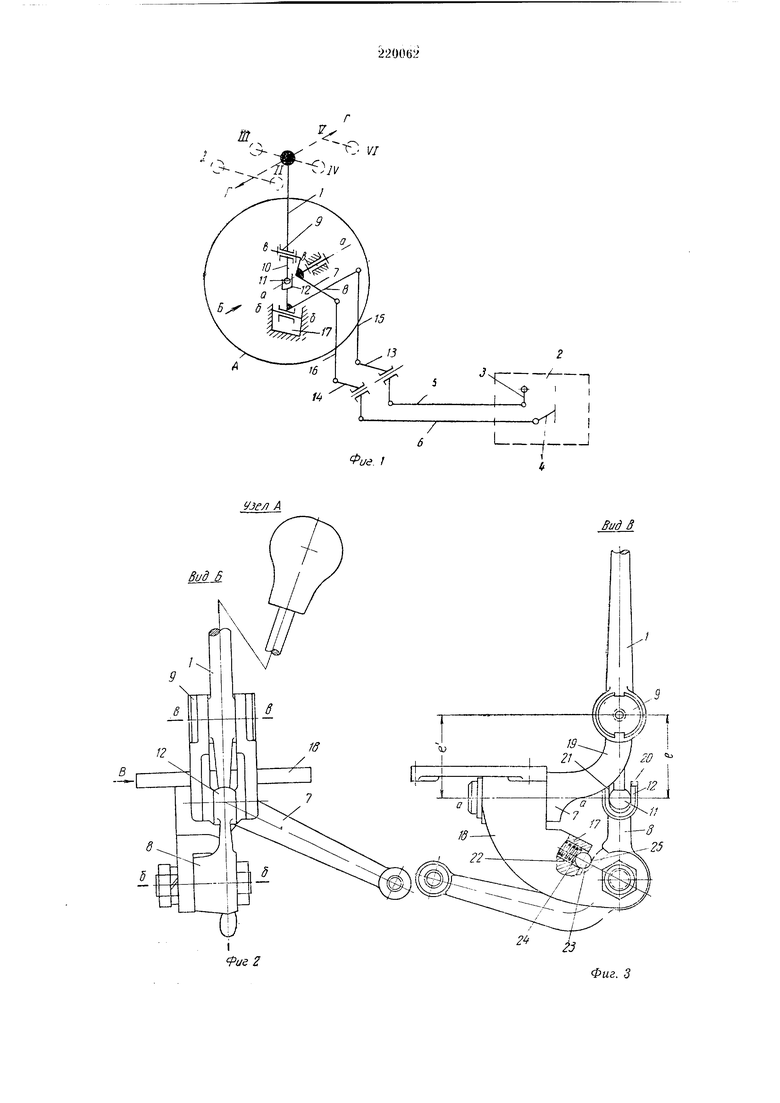
На фиг. 1 изображена кинематическая схема предложенного устройства; на фиг. 2 -
узел А на фиг. 1 (вид по стрелке 5); на фиг. 3 - вид по стрелке В на фиг. 2.
Рычаг / ручного управления установлен с возможностью вращения в плоскости Г-Г и приблизительно перпендикулярных к ней плоскостях /-//, ///-IV н V-V7 (задний ход). На коробке передач 2 установлены два рычага 5 и -:/ механизма переключения передач: рычаг 3 предназначен для выбора хода, рычаг 4 - для включения соответствующей перерычагами 3 и 4 механизма переключения передач двумя кинематическими цепями 5 н 6, включающими в себя шарнирно соединенные рычаги и тяги.
Ось а-а вращения ведущего звена 7 кинематической цепи 6 расположена в плоскости Г-Г вращения рычага / ручного управления. Ось б-б вращения ведущего звена 8 кинематической цепи 5, скрещивающаяся с осью а-а вращения звеиа 7, расположена в плоскости вращения этого звена. Рычаг 1 ручного управления установлен на щарнире 9, несомом ведущим звеном 7 кинематической цепи 6. Ось в-в шарнира 9 скрещивается с осью а-а вращения звена 7, расположена в плоскости, перпендикулярной оси а-а вращения звена 7. На изображенной схеме эта плоскость совпадает с плоскостью, в которой расположена ось б-б вращения звена 8. Рычаг 1 снабжен выступом 10 с щаровой головкой //, располо жеиным вдоль стержня рычага / по другую сторону от щарнира 9. Ведущее звено 8 имеет вилку 12, взаимодействующую с щаровой головкой // выступа 10 рычага /. В кинематические цепи 5 н 6, связывающие рычаг 1 ручного управления с рычагами 5 и 6, могут входить рычаги 13 и 14, тяги 15 и 16 (число и расположение их может быть различным з зависимости от взаимного располол ;ения рычага 1 ручного управления и коробки передач 2).
В ряде случаев звенья 7 и S могут быть соединены непосредственно с соответствующими тягами 6 и 5. Звено .5 может быть снабжено фиксатором 17.
На фиг. 2 и 3 звено 7 установлено на кронщтейне 18. Шарнир 9 рычага / ручного управления установлен на выступе 19 звена 7. Расстояние е между осью вращения щарнира 9 и центром щаровой головки 11 выполнено предпочтительно равным расстоянию е между осью вращения щарнира 9 и осью а-а вращения звеиа 7. Боковые стороны 20 и 21 паза вилки 12 звена 8 перпендикулярны плоскости Г-Г вращения рычага / ручного управления. Фиксатор 17 может быть выполнен в виде установленного в отверстии 22 кронщтейна 18 щарика 23 с пружиной 24, взаимодействующего с пазом 25 звена 8.
Работа устройства. При перемещении рычага ручного управления в плоскости Г-Г он поворачивается вокруг оси в-в шарнира J. При этом щаровая головка 11, взаимодействуя с вилкой 12, поворачивает звено 8 вокруг оси б-б. Звено 8 через связанные с ним тяги и рычаги поворачивает рычаг 3 и производит выбор соответствующего хода механизма переключения передач. При перемещении рычага в одной из плоскостей /-//, ///-IV или V-V он поворачивается вместе со звеном 7 вокруг оси а-а и через соедиценные этим звеном тяги и рычаги поворачивает рычаг 4, производя включение соответственно первой или второй, третьей или четвертой передачи или заднего хода. При этом щаровая головка 11 выступа 10 рычага 1, центр которой расположен на оси а-а, не меняет своего положения в пазу вилки 12 звена 8.
Предмет изобретения
Устройство для дистанционного управления ступенчатой многоходовой коробкой передач, преимущественно транспортных средств, содержащее рычаг ручного управления, установлепный с возможностью вращения в приблизительно взаимно перпендикулярных плоскостях, два рычага механизма переключеиия передачи, установленные на коробке передач, один из которых предназначен для выбора хода, а другой - для включения соответствующей передачи, две кинематические цени, связывающие рычаг ручного управления с рычагами механизма переключения передач, включающие в себя щарнирно соединенные
рычаги и тяги, причем ось вращения ведущего звена одной кинематической цепи расположена в одной из плоскостей вращения рычага ручного управления, а ось вращения ведущего звена второй кинематической цени, скрещивающаяся с осью вращения ведущего звена первой кинематической цепи, расположена в плоскости вращения ведущего звена первой кинематической цепи, отличающееся тем, что, с целью повыщения надежности работы устройства, рычаг ручного управления установлен на нгарнире, несомом ведущим звеном первой упомянутой кинематической цепи, причем ось этого щарнира, скрещивающаяся с осью вращения этого звена, расположена в
плоскости, перпендикулярной оси вращения этого звена; рычаг ручного управления снабжен выступом с щаровой головкой, простирающимся вдоль стержня рычага по другую сторону от его шарнира, причем расстояние
между осью шарнира рычага ручного управления и центром щаровой головки предпочтительио равно расстоянию осью вращения этого щарнира и осью вращения звена его несущего, а ведущее звено второй упомянутой кинематической цепи снабжено вилкой, взаимодействующей с щаровой головкой выступа рычага ручиого управления.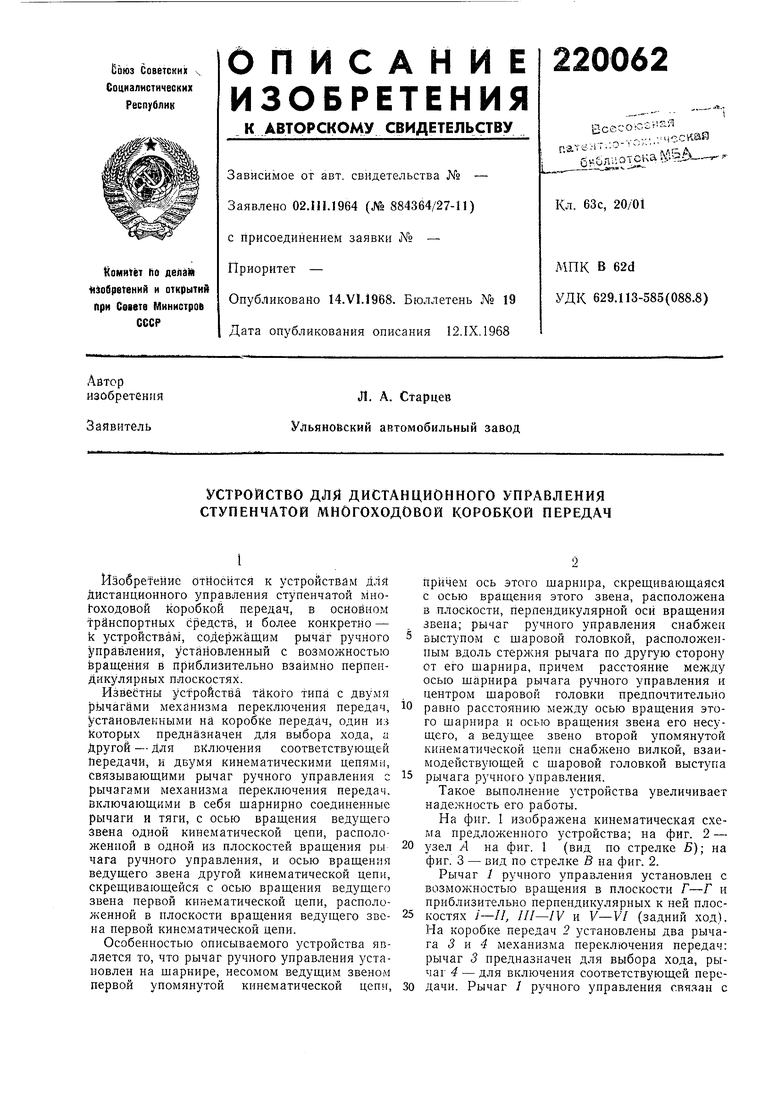
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционный привод управления переключением передач | 1983 |
|
SU1220950A1 |
| Механизм для дистанционного ручного управления коробкой передач | 1988 |
|
SU1523413A1 |
| Устройство для осуществления поворота машинно-тракторного агрегата | 1985 |
|
SU1371541A1 |
| Самоходный комбайн | 1980 |
|
SU921447A3 |
| Коробка передач | 1986 |
|
SU1350416A2 |
| ТРАНСМИССИЯ СНЕГОХОДА | 2022 |
|
RU2794007C1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1973 |
|
SU379704A1 |
| Устройство для управления коробкой передач транспортного средства | 1981 |
|
SU993231A1 |
| Устройство для комбинированного управления двигателем и муфтой сцепления транспортного средства | 1988 |
|
SU1523415A1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО ПРЕКРАЩЕНИЯ ПОДАЧИ ТОПЛИВА В КАРБЮРАТОРНЫХ ТРАНСПОРТНЫХ ДВИГАТЕЛЯХ ПРИ ДВИЖЕНИИ ПО ИНЕРЦИИ (НАКАТОМ) | 1939 |
|
SU63594A1 |