Известны автоматические экстремальные оптимизаторы, выполненные на элементах УСЭПА с раздельными пробным и рабочим воздействиями или совмещенными воздействиями.
Предлагаемый регулятор-оптимизатор отличается от известного тем, что позволяет обеспечить -высокое быстродействие за счет совмещения рабочих и пробных движений « повысить надежность и помехоустойчивость работы оптимизатора.
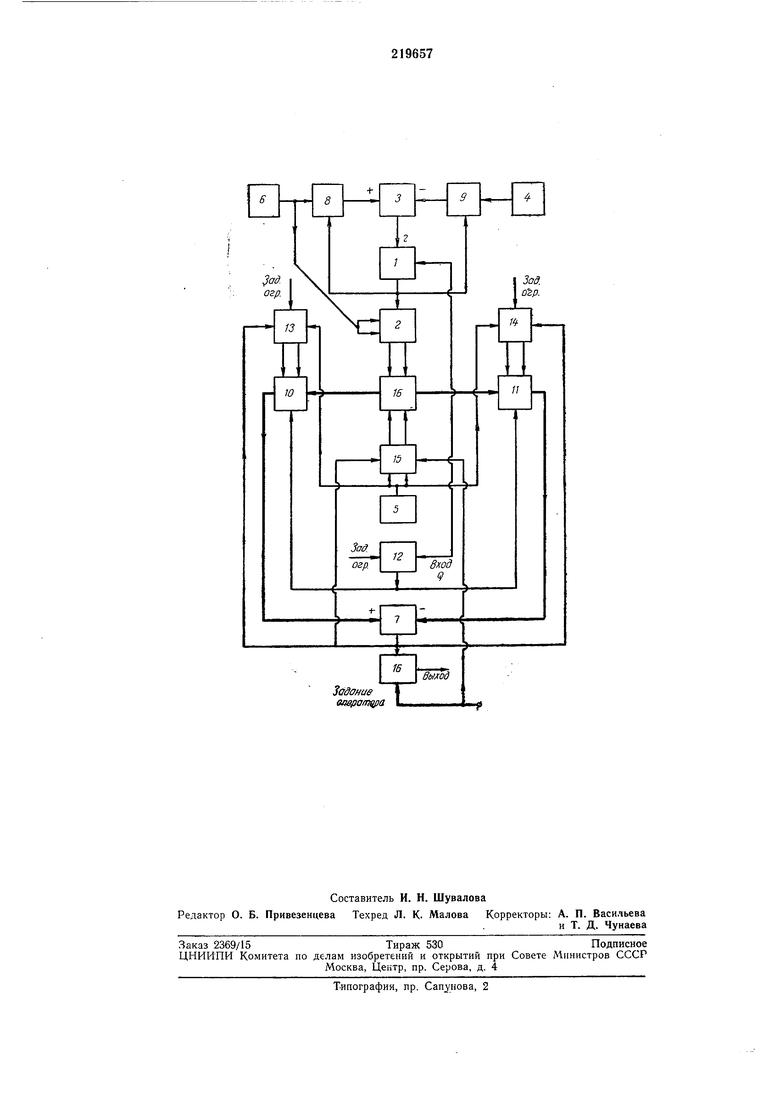
На чертеже приведена блок-схема оптимизатора.
Она содержит следующие блоки: / - сумматор и реле с гистерезисной петлей; 2 - триггерный блок; 3 - -интегратор в виде реверсивного счетчика с преобразователем Д- Н, фильтры и нелинейные преобразователи; 4, 5, 6 - генераторы (1, II, III соответственно); 7 - интегратор в виде реверсивного счетчика с преобразователем Д-Н; 8, 9, 10, 11 - логические блоки; 12 - блок ограничения входа струйного оптимизатора; /5, 14 - блоки ограничения нижнего и верхнего выхода соответственно; 15 - блок сравнения; 16 - блок переключения с ручного управления на автоматическое и обратно.
-входят блоки 1, 2 Н 7 (через 16, 10 и 11) и объект; в контур измерения - блоки У и 5 (через 8 и 9). Блоки 3, 8, 9, 4 м 6 образуют устройство, формирующее вспомогательный
сигнал.
Контур регулирования предназначен для формирования пробного и рабочего воздействий, которые в оптимизаторе совмещены. Контур измерения определяет длительность пробного воздействия. Оба контура связаны через блок 1. Оптимизатор оснащен устройствам-и ограничения входа (блок 12 через блоки 10 и 11) и выхода ( - блок 13 через блок 10, верхнее - блок 14 через бло-к 11).
Назначение блоков 8, 9, 10 и 11 - пропускать или не -пропускать импульсы от блоков 4, 5 и 6 на реверсивные счетчики (блоки «3 и 7). Выход струйного оптим-изатора (с блока 7) подк.тючен ко входам блоков 16, ,13, 14 и
15, вход подключен к блокам 1 и 12. Задание
оператора соединено с входами блоков 15 и
16. Задания ограничений соединены с входами
блоков 12, 13 и 14.
Генератор I (блок 4) соединен с блоком 9;
генератор II (блок 5) - с входами блоков 13, 14 и 15; генератор III (блок 6) - с входами блоко-в S и 5.
выход блока 7. В положении «ручное управление к блокам 10 и 11 через блок 16 подключен блок 15; к выходу оптимизатора через блок 16 подключено «задание оператора.
Рассмотрим работу оптимизатора для случая поиска максимума.
В работе .выход оптимизатора представляет собой давление, л-инейно изменяющееся во времени. Это обеспечивается интегратором 7, на вход которого подается постоянный сигнал (импульсы на реверсивный счетчик поступают с постоянной частотой). Длительность интегрирования и момент изменения знака сигнала, поступающего на интегратор 7, зависят от соотношения величины выхода объекта Q и величины Т вспомогательного сигнала, 1фО рмируемого блоками 3, 8 } 9, 4 w. 6. Сравнение осуществляется блоком 1, в котором указанные величины вычитаются, а разность подается на реле с гистерезисной петлей. Выход реле имеет два значения - «нуль и «единица. КоГда выход реле равен «нулю, то блок 9 пропускает имлульсы от генератора I, а блок 8 не пропускает импульсы от генератора III. В это время величина вспомогательного сигнала быстро уменьщается, так как частота генератора 1 выще, чем генератора III. В некоторый момент времени выход реле с гистерезисной петлей изменяется с «нуля на «единицу. Блоки 9 и 8 меняются ролями. Величина вспомогательного сигнала возрастает. Скорость роста выбирается большей, чем средняя скорость изменения выхода объекта. Если выход объекта растет при данном изменении выхода оптимизатора,- то разность величины вспомогательного сигнала и величины выхода объекта растет медленно. Если же выход объекта убывает, то разность растет быстрее. Реле срабатывает, как только величина разности достигает определенной величины, зависящей от ширины петли. Поэтому интервал времени в первом случае больше, чем во втором. Так как интервалы убывания и роста выхода объекта чередуются, то в среднем выход объекта растет.
В момент перехода выхода реле с «единицы на «нуль меняет свое состояние триггер в блоке 2; состояние триггера определяет знак сигнала, поступающего на интегратор 7. Время у.меньшения величины вспомогательного сигнала, или, что то же самое, длительность состояния «нуль .реле с гистерезисной петлей выбирается равным сумме времен запаздывания и инерционности объекта.
Предмет изобретения
Автоматический экстремальный оптимизатор с совмещенными рабочим и пробным движениями на элементах струйной техники, содержащий сумматор и триггер, управляющий блоком переключения режимов работы, отличающийся тем, что, с целью повышения его помехоустойчивости и надежности при работе с инерционными объектами или объектами с запаздыванием, в нем дополнительно установлен интегратор на реверсивном счетчике с преобразователем дискретный (непрерывный) и парой последовательно соединенных логического блока и генератора импульсов и реле с петлей гистерезиса, подключенное к .сумматору, первый и второй входы которого подсоединены соответственно к интегратору и выходу объекта, а выход одновременно подключен к триггеру и обоим логическим блокам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПНЕВМАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ УСКОРЕНИЯ ДВИЖЕНИЯ ТЕЛА В СКОРОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421734C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И ПНЕВМАТИЧЕСКИЙ СКОРОСТЕМЕР ДЛЯ ТЕЛА | 2010 |
|
RU2421733C1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1968 |
|
SU212356A1 |
| Аналого-цифровой преобразователь | 1989 |
|
SU1640823A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420745C1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| ОПТИМИЗАТОР | 1971 |
|
SU314191A1 |
| Компенсационный акселерометр | 2019 |
|
RU2720327C1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |