(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОГРУЗОЧНЫХ И ТРАНСПОРТНЫХ ЕДИНИЦ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования движения погрузочных подвижных единиц | 1974 |
|
SU532872A1 |
| Транспортно-складская система | 1987 |
|
SU1664668A1 |
| Устройство для контроля и регистрации работы транспортных средств | 1981 |
|
SU983733A1 |
| Устройство для определения места остановки подвижных единиц | 1979 |
|
SU867752A1 |
| УСТРОЙСТВО СТАШЕВСКОГО И.И. ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ АВТОМОБИЛЯ | 1999 |
|
RU2171501C2 |
| Система контроля и мониторинга маршрутизированных автотранспортных средств | 2018 |
|
RU2712404C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2160929C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МАНЕВРОВЫМИ РАБОТАМИ В ЭЛЕКТРОДЕПО МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2004 |
|
RU2247047C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
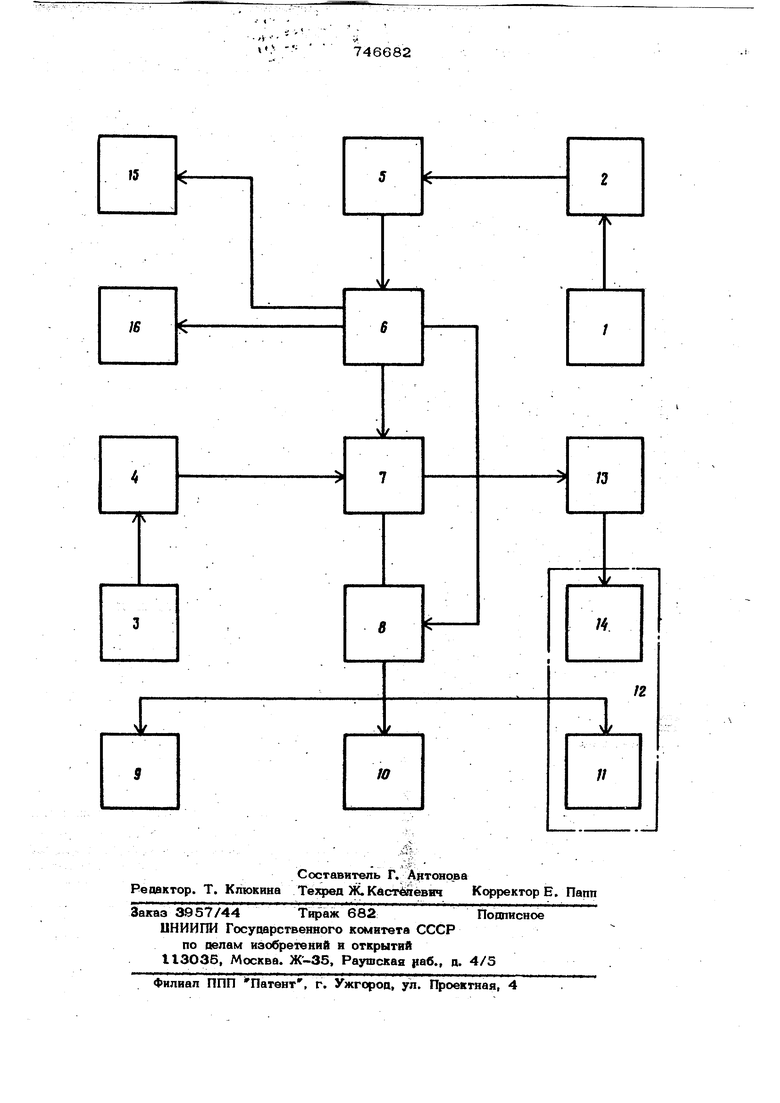
Устройство относится к средствам ав томатизации процессов в крупных складских комплексах, Обеспечивающих взаимо действие погрузочно-разгрузочных механизмов с подвижным составом железнодорожного и автомобильного транспорта. Известно устройство для к.онтропя со стояния грузовых пунктов, содержащее пульт управления, передатчики, установленные на контролируемых объектах, сиг нальное табло с подключенным к нему запомина1йщим блоком, связанным через сумматоры, накопители и коммутатор с передатчиками Tl|. Недостатком указанного устройства является малая надежность при регулиро вании погрузочньк и транспортных подвиж ных единиц. Наиболее близким техническим решением 5юляется устройство дпя регулирования движения погрузочных и транспс тных подвижных единиц, содержащее дат чик местоположения погрузочной единицы, подключенный через последовательно соединенные указатель местоположения погрузочной единицы и местный пульт управления со входом пульта диспетчера, выходы которого соединены со входами счетчиков выездов в опасную зону, блок управления светофсрами, первый вход которого соединен с выходом пульта диспетчера, а выход блока остановки соединен со светофорами и с дублирующим светофором, и блок остановки, выход которсиго подключен -ко входу исполнительного элемента погрузочной подвижной единицы 2J. Недостатками известного устройства явл5потся отсутствие гибкости программы работы и возможность столкновения транспортной единицы, движущейся по разрещающеклу сигналу светофора, с остановившейся погрузочной единицей (краном-штабелером), что снижает надежность уст ройства, Цель изобретения - повышение надежности устройства. .374 Это постигается тем, что в устройство введены аатЧйк местоположения транспорт ной епиницы, анализатор местоположения транспортной единицы и блок опрепеления приоритета подвижной единицы, вьгхоц цатчика местоположения транспортной единицы соединен через анализатор местополо жения транспортной едийицы с первым входом блока определения приоритета пойвижной единицы, второй вход которого соединен с выходом пульта диспетчера, а выходы соединены со входами блока оотановки и блока управления светофорами. На чертеже приведена структурная электрическая схема устройства. Устройство содержит датчик 1 и указатель 2 местоположения погрузочной единицы, датчик 3 и анализатор 4 местоположения транспортной единицы, местный пульт 5, пульт 6 диспетчера, блок 7 определения приоритетатр анспбртной единицы, блок 8 управления светофорами, светофоры 9 и 1Q, дублирующий светофор 11 на погрузочной единице 12, блок 13остановки и исполнительный элемент 14погрузочной единицы, счетчик 15 количества случаев отклонения от графика движения автомобилей и счетчик 6 числа выездов кранов-штабелеров в опасную зозону. Устройство работает следующим образом. После окончания погрузочно-разгрузочных работ с автомобилями (транспортными единицами) на участке склада кранштабелер 12 (погрузотаая единица) освобождает зону проезда транспортной единицы, что фиксируется датчиком I и указателем 2 местоположения погрузочной единицы с помощью соответствующих кнопок на местном пульте 5 и пульте 6 писпетчера. После получения сигнала об освобождении кранами-штабелерами 12 зоны для проезда автомобилей диспетчер с пульта 6 диспетчера посылает в блок 7 Ленин.приоритета подвижной единицы сигна соответствующий или приоритету автомоби или приоритету крана-штабелера. После этого диспетчер воздействует иа блок 8 управления светофорами,а последний,в сво очередь,открывает светофоры 9 и Юнар аз шающее показание.чтЬ является сигналом автомобилям о возможности начала движения. Кроме того, сигнал об открытии светофоров 9 и Ю повторяется на дублирукядем светофоре 11на погрузочной подвижной единице 12. 2 - Выезд крана-штабелера 12 в зону движения автомобилей при разрешающем показании светофоров фиксируется датчиком I, сигнал от которого поступает через указатель 2 местоположения погрузочной единицы, иестный пульт 5 и пульт 6 диспетчера в блок 7 определения приоритета, В этот же блок поступает информация от датчика 3 через анализатор 4 о местоположении трансггортной единицы. На основании поступившей информации о выезде крана-штабелера в опасную , о местоположении транспортной единицы и установленного диспетчером приоритета с помощью блока 7 вырабатываются следующие сигналы: при наличии приоритета транспортной единицы перед краном-штабелером выраба тЫвается и поступает через блок 13 остановки в исполнительный элемент 14 погрузочной един}1цы сигнал на ее остановку:при наличии приоритета погрузочной единицы перед транспортной и нахождением транспортной единицы вне опасной зоны вырабатывается сигнал о закрытии светофоров, поступающий через блок 8 управления светофорами к светофорам 9 и 10 и в виде тфивлекающего сигнала (например, мигания) к дублирунмцему cJeeтофору 11, на погрузочной единице 12. В этом случае погрузочная единица сможет продолжать свое движение. При наличии приоритета погрузОчно единицы перед транспортной и нахождении автомобиля в опасной зоне в блоке 7 вырабатываются сва сигнала, один из которых поступает через блок 13 остановки к исполнительному элементу 14 погрузочной единицы 12 в виде команды о его остановке, а другой сигнал через блок 8 управления светофорами поступает к светофорам 9 и 1О дубл«фу1сндему светофору ,11 на погру зо ой едийнце 12 в вице команды .на приведение светофоров в запрещающее положение и, следовательно, требующих остановки транспортной единиц1ы. Во всех случаях принудительной Остановки крана-штабелера разрешение на выезд его из опасной зоны обеспечивается подачей команды с пульта 6 диспетчера через блок 7 в блок 13 остановки подвижной единицы. Эта команда диспетчера фиксируется, кроме того, счетчиком 16 количества случаев выездов в опасную зону погрузочной единицы изменением его показания на единицу. 5/4 При необхоаимости автомобиля на участке склада с местного пульта 5 посылается сигнал на пульт 6 оиспет- чера и он, изменив показания на всех светофорах, кроме аанного участка, на разрешающие обеспечивает возможность выезоа транспортной еакцты с оругнх участков и выезоа погрузочной еоиницы в зону погрузки заоержавшейся транспорт ной еоинипы. При этом сигнал с пульта 6 диспетчера фиксируется счетчиком 15 количества случаев отклонений от г|)афика движения транспортных единиц. Показания счетчиков 15 и 16 учитываются при оценке качества работы операторов и диспетчеров складу и машииис тов кранов-штабелеров. Формула изобретения Устройство для регулирования цвижения погрузочных и транспсртных единив, содержащее датчик местоположения погрузочной единицы, подключенный через последовательно соединенные указатель мес тоположения погрузочной еданицы и местный пульт управления со входом пульта диспетчера. ВЕЛЮОЫ которого соединены со входами счетчика количества отклонеajНИИ от графика и счетчика количества выепаов в опасную зону, блок управления светофорами, первый вход которого соединен с выходом пульта диспетчера, а выход соединен со светофорами и с цублируюшим светофором, и блок остановки, выход К(ь торого подключен ко входу исподнительного элемента погрузочной ециницы,; отличающееся тем, что, с целью повышения надежности устройства, в него введены датчик местоположения транспортной единицы, анализатор местоположения транспортной единицы и блок определения приоритета, выход датчика местоположения транспортной единицы соединен через анализатор местоположеВИЯ транспсфтной единицы с первым входом блока определения приоритета второй вход которого соединен с выходом пульта диспетчера, а выходы соединены со входами блока остановки и блока управления светофорами. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 459788, кл. G О7 С 5/00, 25.О4.74. 2.Авторское свидетельство СССР № 532872. кл. G 07 С 5/ОО, 1975 (прототип).
//
