Изобретение относится к оборудованию для механизации транспортно- складских работ с пакетами тарно-штучных грузов, преимущественно к транспортно- складским системам для обслуживания стеллажей.
Целью изобретения является снижение энергозатрат.
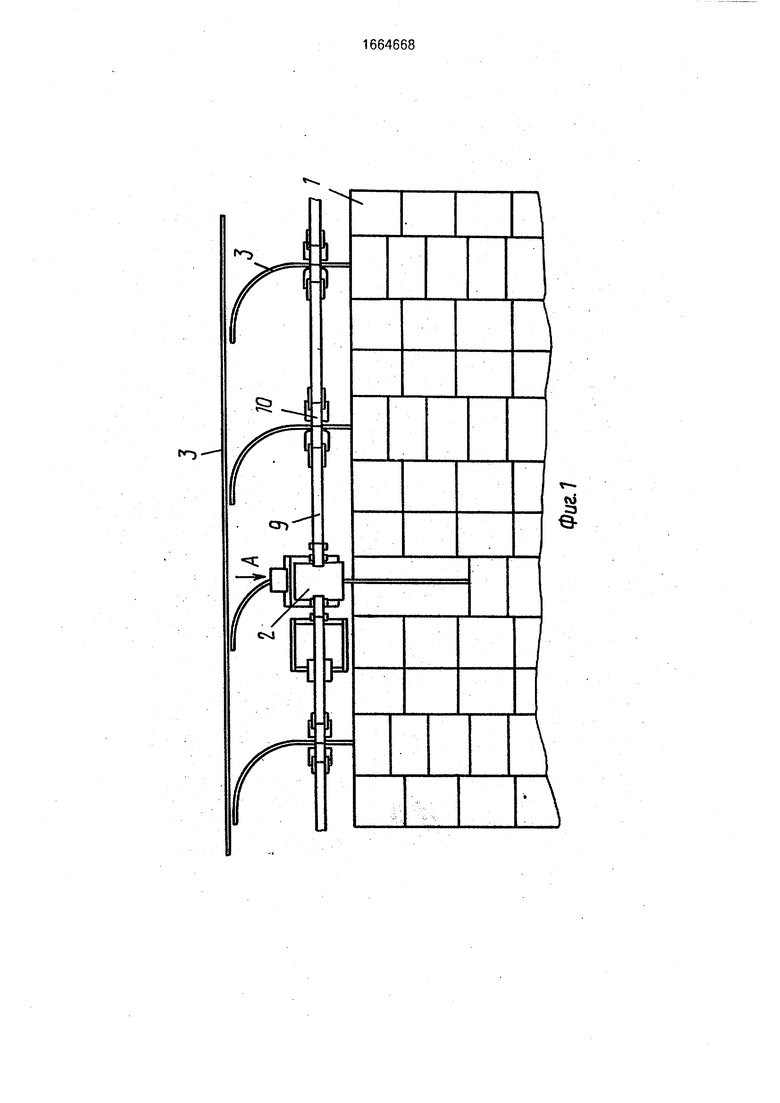
На фиг.1 представлена схема транспор- тно-складской системы, вид сверху; нафиг.2
-вид А на фиг.1 (узел подвижных участков рельсового пути и верхняя часть крана-шта- белера); на фиг.З - вид Б на фиг.2; на фиг.4
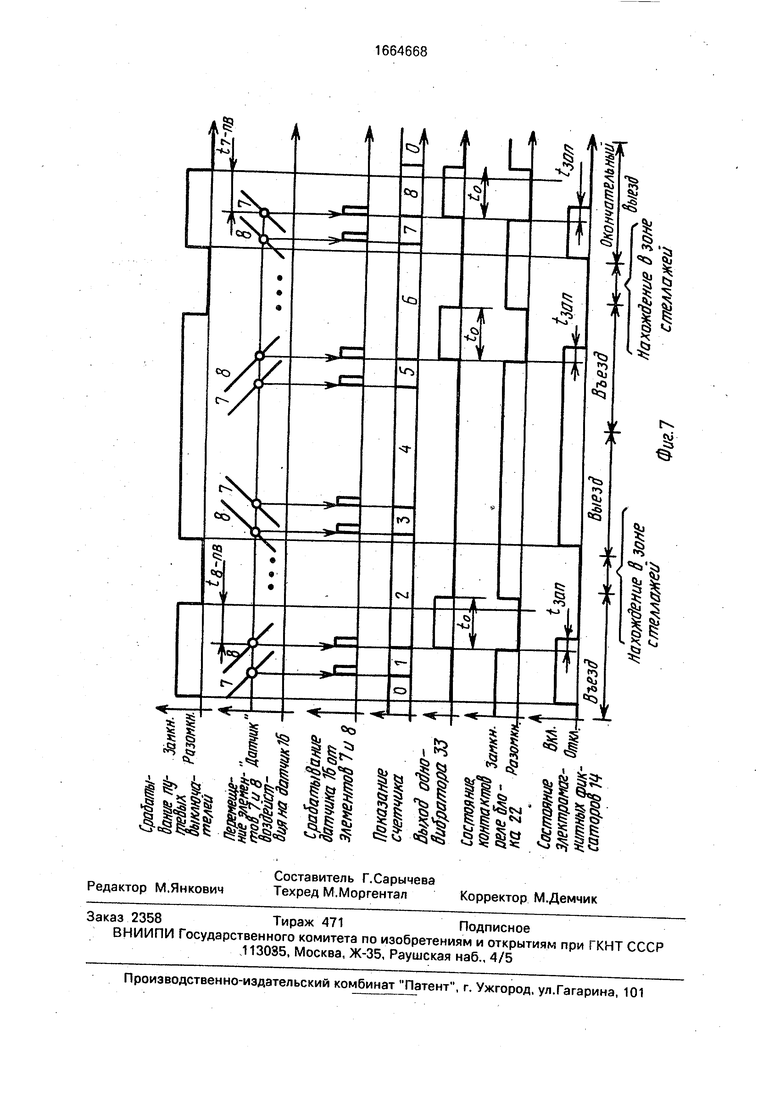
-разрез В-В на фиг.2; на фиг.5 - блок-схема устройства управления подвижными участками рельсового пути подвесной дороги; на фиг.6 - функциональная схема блока формирования команд управления электромаг- нитами фиксаторов; на фиг.7 - циклограммы срабатывания средств автоматического управления системы.
Транспортно-складская система (фиг.1) содержит стеллажи 1 специальной конструкции. Одна секция стеллажей 1 состоит из двух рядов стеллажных ячеек клеточного типа, а в проезде между ними расположены несущие элементы, установленные на ячейках. Несущие элементы предназначены для хранения на них грузовых единиц в пакетированном виде или специальной таре. Элементы могут выполняться в виде стационарных консолей, расстояние между концами которых обеспечивает проезд стеллажного крана-штабелера 2 с колонной, или откидывающимися от автономного привода или специального механизма, смонти- рованного на кране-штабелере 2 (не показаны). Секция представляет собой два ряда стеллажей 1
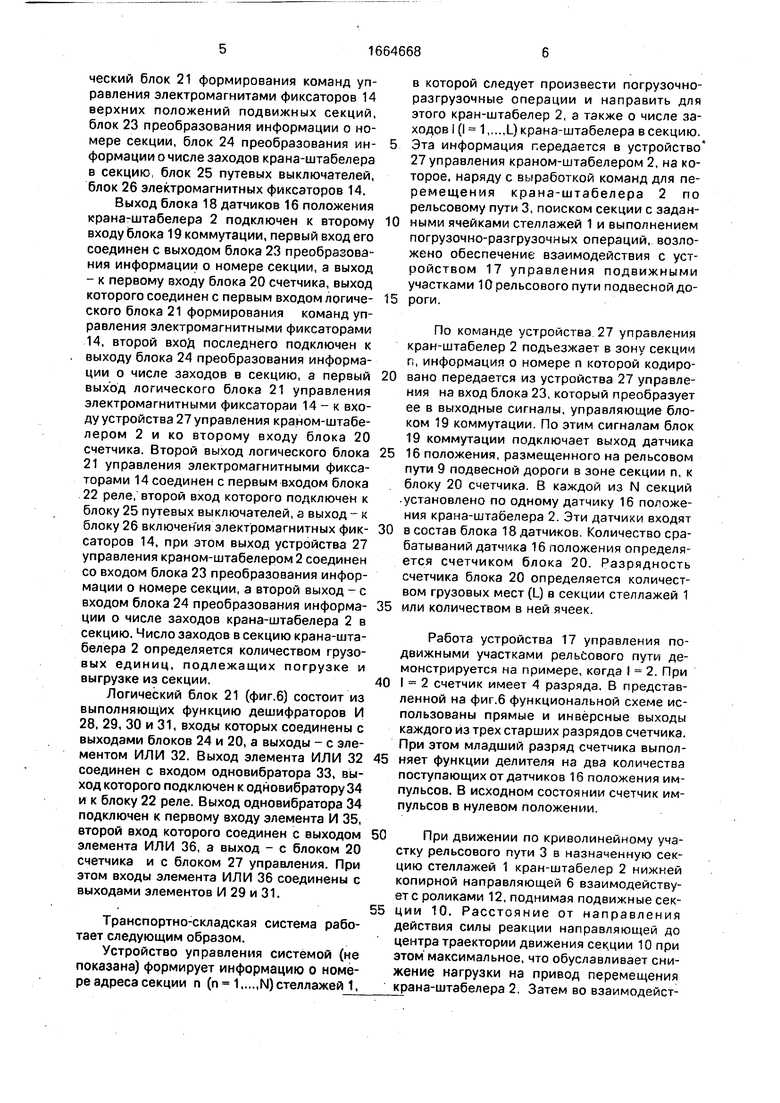
клеточного типа, в проезде между которыми на несущих элементах расположены грузовые единицы и размещен рельсовый путь 3 крана-штабелера 2. Стеллажный кран-штабелер 2 выполнен опорным одно- балочным и перемещается из одного проезда в другой по рельсовому пути 3 с криволинейными участками. Для загрузки и разгрузки ячеек стеллажей 1 телескопический вилочный захват крана-штабелера 2 установлен на грузоподьемнике 4 (фиг.2) с возможностью поворота в горизонтальной плоскости. В верхней части колонны крана- штабелера 2 расположены по обе стороны в направлении движения и симметрично относительно вертикальной оси колонны две верхние копмрные направляющие 5 и нижняя горизонтальная криволинейная направ- ляющая 6. Верхние копирные направляющие 5 образуют клиновую поверхность, а нижние 6 смонтированы с подъемом в сторону колонны. На одной из боковых сторон колонны также симметрично от- носительно ее вертикальной оси закреплены элементы 7 и 8 воздействия на
датчик.
Транспортирующее устройство системы содержит рельсовый путь подвесной дороги, включающий стационарные 9 и установленные с возможностью плоскопа0 раллельного перемещения подвижные секции 10, закрепленные шарнирно на параллельных и равных по длине рычагах 11. В нижней части (полке) подвижных секций 10 смонтированы с возможностью пово5 рота вокруг вертикальной оси опоры ролики 12 (фиг. 2 и 3). При этом вертикальная ось поворота опоры роликов 12 размещена со смещением относительно оси вращения самого ролика 12. Точно так же смонтированы
0 в верхней части (полке) подвижных секций 10 ролики 13, а ось вращения их опор расположена горизонтально. Такое крепление опор роликов 12 и 13 позволяет им самоустанавливаться при взаимодействии с ко5 пирными направляющими 5 и 6 крана-штабелера 2. На стационарных участках рельсового пути 9 со стороны каждой подвижной секции 10 установлены взаимодействующие с последними бесконтактные
0 фиксаторы 14. Например, сердечник электромагнита удерживает подвижные секции 10 в открытом положении. На кронштейнах фиксаторов 14 установлены взаимодействующие с подвижными секциями 10 в их от5 крытом положении путевые выключатели 15. Размеры элементов крепления подвижных секций 10 и расположение фиксаторов 14 выбраны такими, чтобы при отключении электромагнитов фиксаторов 14 подвижные
0 секции 10 самопроизвольно могли опускаться и стремились бы занять исходное закрытое положение. При этом рабочие поверхности ездовых элементов участков рельсового пути 9 должны быть точно совме5 щены без зазоров и перекосов. Для самоустановки подвижных секций 10 и исключения их заклинивания в закрытом положении торцовые грани полок рельсового пути 9 и подвижных секций 10, взаимодей0 ствующих друг с другом, выполнены по дуге окружности.
В нижней части стационарных участков рельсового пути 9 смонтированы датчики 16 положения крана-штабелера 2, взаимодей5 ствующие с элементами 7 и 8.
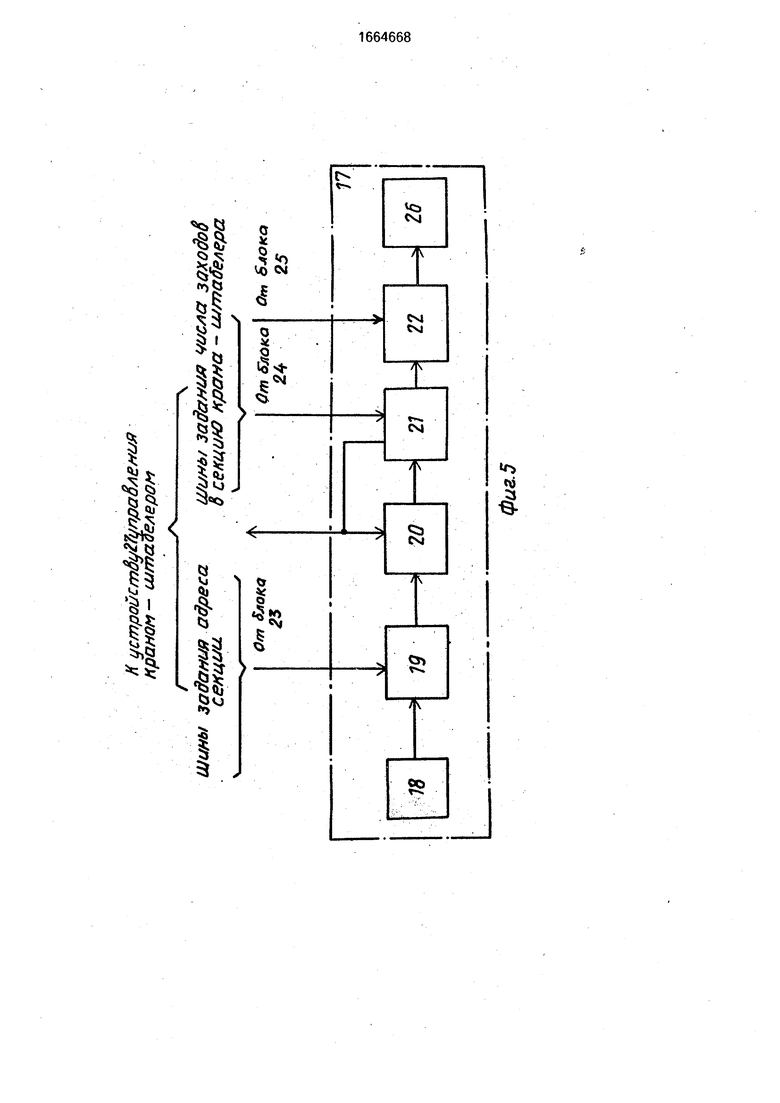
Устройство 17 управления (фиг.5) подвижными участками 10 подвесной дороги рельсового пути содержит блок 18 датчиков верхнего положения подвижных секций, блок 19 коммутации, блок 20 счетчика, логический блок 21 формирования команд управления электромагнитами фиксаторов 14 верхних положений подвижных секций, блок 23 преобразования информации о номере секции, блок 24 преобразования информации о числе заходов крана-штабелера в секцию, блок 25 путевых выключателей, блок 26 электромагнитных фиксаторов 14.
Выход блока 18 датчиков 16 положения крана-штабелера 2 подключен к второму входу блока 19 коммутации, первый вход его соединен с выходом блока 23 преобразования информации о номере секции, а выход - к первому входу блока 20 счетчика, выход которого соединен с первым входом логического блока 21 формирования команд управления электромагнитными фиксаторами 14, второй вход последнего подключен к выходу блока 24 преобразования информации о числе заходов в секцию, а первый выход логического блока 21 управления электромагнитными фиксатораи 14 - к входу устройства 27 управления краном-штабе- лером 2 и ко второму входу блока 20 счетчика. Второй выход логического блока
21управления электромагнитными фиксаторами 14 соединен с первым входом блока
22реле, второй вход которого подключен к блоку 25 путевых выключателей, а выход - к блоку 26 включения электромагнитных фиксаторов 14, при этом выход устройства 27 управления краном-штабелером 2 соединен со входом блока 23 преобразования информации о номере секции, а второй выход - с входом блока 24 преобразования информации о числе заходов крана-штабелера 2 в секцию. Число заходов в секцию крана-штабелера 2 определяется количеством грузовых единиц, подлежащих погрузке и выгрузке из секции.
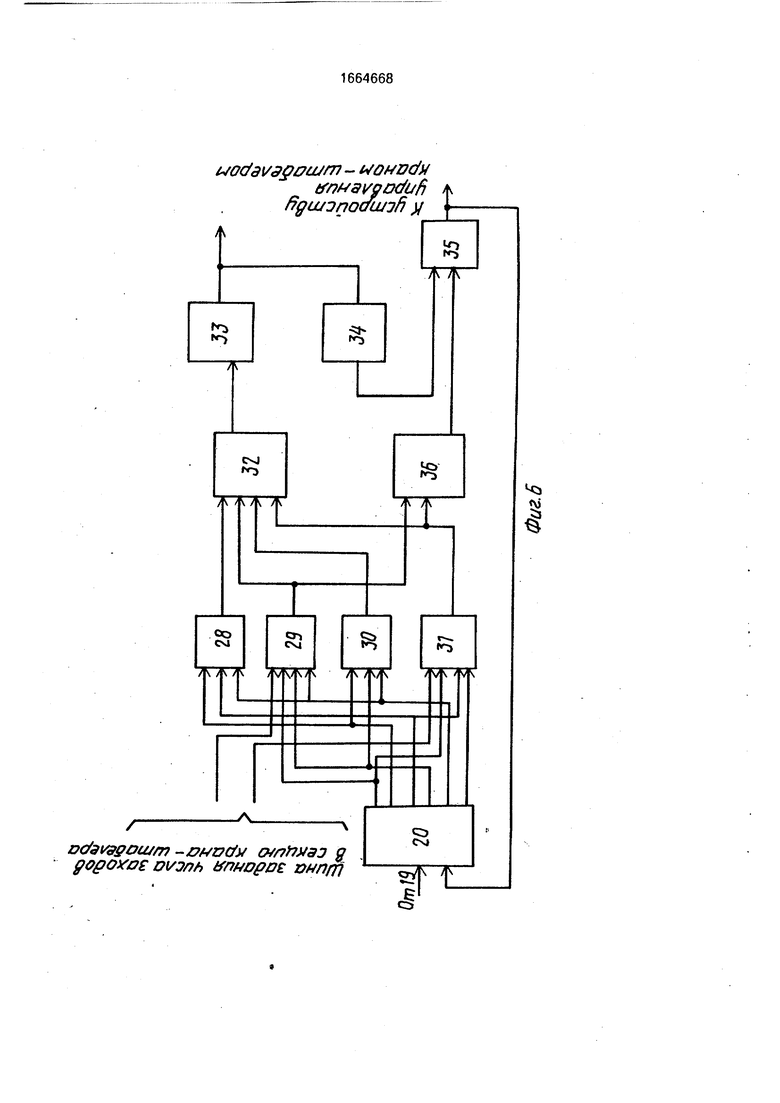
Логический блок 21 (фиг.б) состоит из выполняющих функцию дешифраторов И 28, 29, 30 и 31, входы которых соединены с выходами блоков 24 и 20, а выходы - с элементом ИЛИ 32. Выход элемента ИЛИ 32 соединен с входом одновибратора 33, выход которого подключен к одновибратору 34 и к блоку 22 реле. Выход одновибратора 34 подключен к первому входу элемента И 35, второй вход которого соединен с выходом элемента ИЛИ 36, а выход - с блоком 20 счетчика и с блоком 27 управления. При этом входы элемента ИЛИ 36 соединены с выходами элементов И 29 и 31.
Транспортно-складская система работает следующим образом.
Устройство управления системой (не показана) формирует информацию о номере адреса секции п (п 1N) стеллажей 1,
в которой следует произвести погрузочно- разгрузочные операции и направить для этого кран-штабелер 2, а также о числе заходов I (I 1L) крана-штабелера в секцию.
5 Эта информация передается в устройство 27 управления краном-штабелером 2, на которое, наряду с выработкой команд для перемещения крана-штабелера 2 по рельсовому пути 3, поиском секции с задан0 ными ячейками стеллажей 1 и выполнением погрузочно-разгрузочных операций, возложено обеспечение взаимодействия с устройством 17 управления подвижными участками 10 рельсового пути подвесной до5 роги.
По команде устройства 27 управления кран-штабелер 2 подъезжает в зону секции п, информация о номере п которой кодиро0 вано передается из устройства 27 управления на вход блока 23, который преобразует ее в выходные сигналы, управляющие блоком 19 коммутации. По этим сигналам блок 19 коммутации подключает выход датчика
5 16 положения, размещенного на рельсовом пути 9 подвесной дороги в зоне секции п, к блоку 20 счетчика. В каждой из N секций -установлено по одному датчику 16 положения крана-штабелера 2. Эти датчики входят
0 в состав блока 18 датчиков. Количество срабатываний датчика 16 положения определяется счетчиком блока 20. Разрядность счетчика блока 20 определяется количеством грузовых мест (L) в секции стеллажей 1
5 или количеством в ней ячеек.
Работа устройства 17 управления подвижными участками рельсового пути демонстрируется на примере, когда I 2. При
0 I 2 счетчик имеет 4 разряда. В представленной на фиг.б функциональной схеме использованы прямые и инверсные выходы каждого из трех старших разрядов счетчика. При этом младший разряд счетчика выпол5 няет функции делителя на два количества поступающих от датчиков 16 положения импульсов. В исходном состоянии счетчик импульсов в нулевом положении.
0 При движении по криволинейному участку рельсового пути 3 в назначенную секцию стеллажей 1 кран-штабелер 2 нижней копирной направляющей 6 взаимодействуете роликами 12, поднимая подвижные сек5 ции 10. Расстояние от направления действия силы реакции направляющей до центра траектории движения секции 10 при этом максимальное, что обуславливает снижение нагрузки на привод перемещения крана-штабелера 2. Затем во взаимодействйе с роликами 13 вступают верхние копир- ные направляющие 5, которые устанавливают подвижные секции 10 в открытое положение. В этом положении срабатывают два путевых выключателя 15, установленных на рельсовом пути подвесной дороги против заданной секции. Срабатывают элементы фиксаторов 14, в результате чего фик- сируются обе подвижные секции 10 в открытом положении. Это дает возможность крану-штабелеру 2 свободно проезжать через зону рельсового пути подвесной дороги. При дальнейшем перемещении кра- на-штабелера 2 в секцию элемент 7 воздействия на датчик приводит к срабатыванию последнего, а в младшем разряде счетчика появляется логическая 1, и счетчик устанавливается в положение 1. Так как выходы младшего разряда счетчика не подключены ни к каким внешним цепям, то в этом положении счетчик не посылает никаких сигналов в блок 21 управления фиксаторами 14.
На следующем этапе въезда крана шта- белера 2 в секцию второй элемент 8 воздействия на датчик приводит к второму срабатыванию датчика 16 положения. Импульс от этого датчика устанавливает логическую 1 на прямом выходе второго разряда счетчика, счетчик переходит в состояние 2. Логическая 1 с этого выхода совместное логическими 1 инверсных выходов третьего и четвертого разрядов счетчика поступают на входы первого элемента И 28. Таким образом, элемент И 28 в отличие от элементов И 29, 30 и 31 на всех своих входах имеет по логической 1 Образующая при этом на выходе элемента И 28 логическая 1 через элемент ИЛИ 32 запускает одновибратор 33. Последний формирует на выходе импульс, включающий реле блока 22, нормально замкнутый контакт которого разрывает цепь питания электромагнитов. Датчик 16 так же, как и путевые выключатели 15, затем отключается. Для того, чтобы не прошло повторного включения электромагнита непосредственно после окончания импульса, сформированного од- новибратором 33 (фиг.7), длительность этого импульса выбирается несколько большей, чем промежуток времени от срабатывания датчика под действием элемента 8 до размыкания путевых выключателей при вьезде крана штабелера 2 в секцию. При этом дальнейший въезд крана-штабелера 2 в секцию сопровождается самопроизвольным опусканием подвижных секций 10 в нижнее свое положение на время работы крана-штабелера 2 внутри секции стеллажей 1.
Ролики 12 и 13 взаимодействуют с ко- пирными направляющими 5 и 6, плавно опуская подвижные секции 10.
При выезде крана- штабелера 2 из секции стеллажей 1 направляющие5 и 6, последовательно взаимодействуя с роликами 12 и 13, поднимают подвижные секции 10 рельсового пути подвесной дороги в описанном выше порядке . Срабатывают путевые вы0 ключатели 15, включаются электромагнитные фиксаторы 14, фиксируя обе подвижные секции 10 в открытом положении. Кран-шта- белер 2 свободно проезжает через рельсовый путь 9 подвесной дороги. Во время его
5 перемещения от элемента 8 воздействия датчик срабатывает в третий раз, в первом (младшем) разряде счетчика появляется логическая 1, а на входах логического блока 21 не появляется никаких новых сигналов
0 (как и при первом, а также любом нечетном срабатывании датчика).
Далее от элемента 7 воздействия датчик срабатывает в четвертый раз. Это ведет к появлению логической 1 на прямом выхо5 де третьего разряда счетчика и установлению логического О на аналогичном выходе второго разряда.
Элементы И 29 и 31 отличаются от элементов И 28 и 30 тем, что имеют на один
0 выход больше. В случае, когда требуется всего один заход крана штабелера 2 в секцию стеллажей 1 (I 1) блок 24 преобразова- ния информации о числе заходов крана-штабелера 2 в секцию формирует на
5 своем первом выходе логическую 1, а на остальных выходах - логические О (фиг.6). При I 2 логическая 1 вырабатывается только на втором выходе и т.д. В данном случае 2, поэтому с первого выхода блока
0 24 преобразования информации о числе заходов крана штабелера 2 в секцию на первый вход элемента И 29 поступает сигнал логического О. Поэтому присутствие на остальных входах элемента И 29 логической
5 1 не приводит к изменению выходного сигнала этого элемента, а следовательно, и к появлению выходных сигналов логического блока 21 управления электромагнитными фиксаторами 14. В связи с этим электромаг0 ниты остаются включенными, а подвижные секции 10 - в открытом положении.
Таким образом, при выезде крана-штабелера 2 за рельсовый путь с целью проведения погрузочно-разгрузочных операций с
5 подвижным составом подвесной дороги рельсовый путь остается разомкнутым. Подвесной состав не движется, поэтому не опускаются подвижные секции 10, а, следовательно, не затрачивается энергия для их последующего подъема.
s
Qi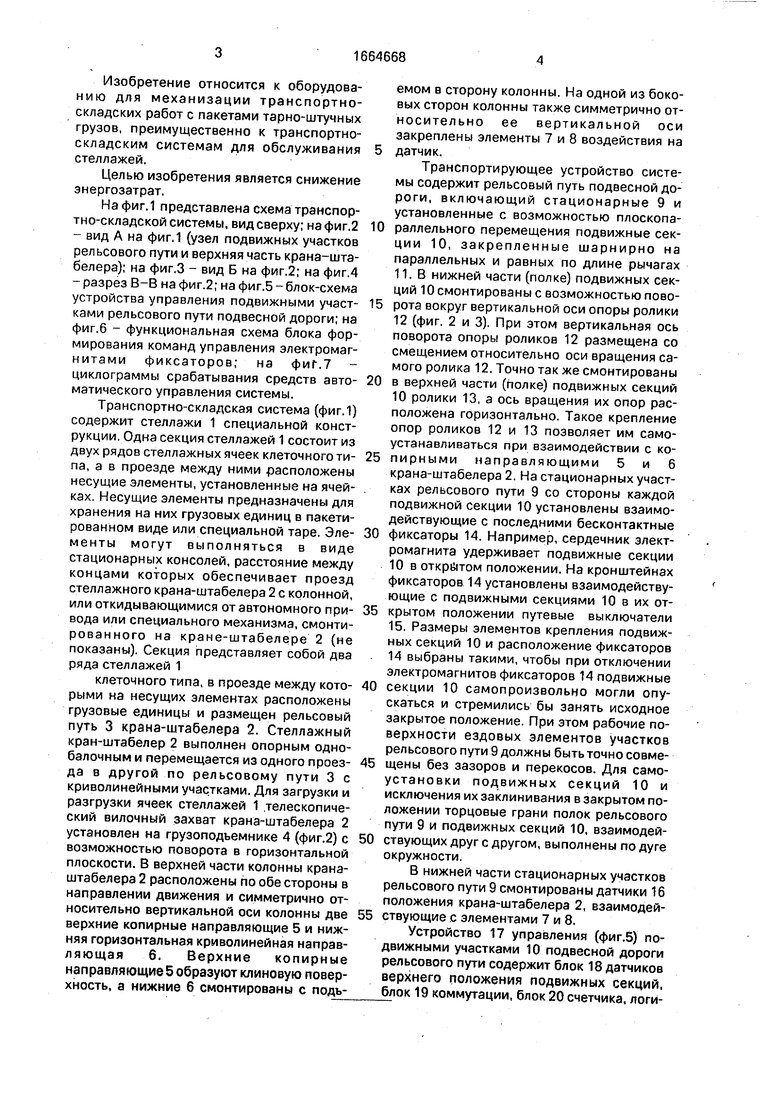
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| СКЛАД ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU371151A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Транспортно-накопительная система | 1989 |
|
SU1747352A1 |
| Секционный конвейер транспортно-накопительной системы | 1989 |
|
SU1691238A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Механизированный склад для хранения штучных грузов | 1976 |
|
SU676503A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
Изобретение относится к оборудованию для механизации транспортно-складских работ с пакетами тарно-штучных грузов, преимущественно к транспортно-складским системам для обслуживания стеллажей. Цель изобретения - снижение энергозатрат. Транспортно-складская система содержит размещенные секциями стеллажи и расположенный между ними кран-штабелер (КШ) 2, на колонне которого установлены копирные направляющие 5 и 6 и элементы воздействия на датчик. Кроме того, система включает подвесную рельсовую дорогу (ПРД), рельсовый путь (РП), снабженный подвижными секциями (ПС) 10, установленными с возможностью взаимодействия с копирными направляющими 5 и 6, фиксаторами 14 верхних положений ПС и датчиками 16. При этом система управления снабжена устройством управления ПС, включающим соединенные между собой и датчиками 16 верхних положений ПС блоки коммутации, счетчик и логический блок формирования команд КШ 2, в соответствии с поступающей информацией о номере секции и о числе заходов в нее перемещается до взаимодействия с ПС 10, которые поднимаются и удерживаются в верхнем положении фиксаторами 14. При этом сигналы от датчика 16 поступают в устройство управления, которое производит счет сигналов и подает соответствующую команду на отключение фиксаторов 14. КШ 2 разгружает или загружает ячейки стеллажей, перемещая изделия к ПРД. При работе КШ 2 в секции ПС 10 находятся в нижнем положении, а при выполнении погрузочно-разгрузочных операций КШ 2 с ПРД - в верхнем положении. 1 з.п.ф-лы, 7 ил.
Ј 2Пф
9L21
77
ч
I
Qi gpng
899 W91
Сигналы, вырабатываемые устройством 17 управления подвижными секциями 10 рельсового пути при втором въезде крана- штабелера 2 в секцию стеллажей 1, аналогичны сигналам, формируемым при первом его въезде, с той лишь разницей, что задей- ствуется элемент И 30, а счетчик последовательно устанавливается в положение 5 и 6.
Работа устройства 17 управления подвижными секциями 10 рельсового пути при выезде крана-штабелера 2 из секции для выполнения погрузочно-разгрузочных работ и последующем выезде на рельсовый путь, соединяющий межстеллажные проезды, происходит следующим образом. Вначале от элемента 8 воздействия датчик срабатывает в седьмой раз, что не вызывает срабатывания логического блока 21 управления электромагнитными фиксаторами 14. Когда же от элемента 7 воздействия датчик срабатывает в восьмой раз, то, в случае I 2, на всех входах элемента И 31 будет установлена логическая 1. Выходным сигналом элемента И 31 (логическая 1), проходящим черех элемент ИЛИ 32, запускается одновибратор 33, который через блок 22 реле отключает электромагниты фиксаторов 14, в результате чего опускаются подвижные участки 10 при выезде крана- штабелера2напозиции погрузки-разгрузки. Так как элементы 7 и 8 воздействуют относительно вертикальной оси колонны крана-штабелера 2, последовательность срабатывания датчика положения и путевых выключателей 15 остается неизменной при проезде в обе стороны крана-штабелера 2 через рельсовый путь подвесной дороги. Поэтому вышеупомянутое требование к длительности выходного импульса одновибратора 33 гарантирует уверенное отключение электромагнитных фиксаторов 14 при последнем выезде крана-штабелера 2 из секции стеллажей 1.
Выходной импульс одновибратора 33 своим задним фронтом запускает одновибратор 34, выходной импульс которого (логическая 1) поступает на первый вход элемента И 35, на втором входе которого так же присутствует логическая 1, поступающая от элемента И 31 через элемент ИЛИ 36. Таким образом, на выходе элемента И 35 формируется сигнал о завершающем этапе работы крана-штабелера 2 в секции стеллажей 1. По этому сигналу счетчик 20 снова устанавливается в нулевое положение, а устройство 27 управления краном-штабеле- ром 2 извещается об окончании работ в заданной секции.
Второй вход элемента ИЛИ 36 используется при формировании сигнала о завершающем этапе работы крана-штабелера 2 в секции, когда (для рассматриваемого 5 случая L 2, а I 1). Элемент ИЛИ 36 должен иметь L входов, а элемент ИЛИ 32 - 2L входов.
В данном случае при проезде крана- штабелера 2 через рельсовый путь 3 подвес- 10 ной дороги датчик 16 положения срабатывал после путевых выключателей 15. Следует отметить, что устройство 17 управления полностью выполняет свои функции при изменении очередности 15 срабатывания датчика 16 положения и путевых выключателей 15.
При загрузке стеллажей 1 так же, как и при их разгрузке, работа устройства 17 управления осуществляется аналогичным об- 0 разом.
Формула изобретения 1.Транспортно-складская система, содержащая Стеллажи, установленный на рельсовых путях с возможностью переме- 5 щения вдоль стеллажей кран-штабелер с подъемно-опускным телескопическим захватом, транспортирующее устройство для передачи к стеллажам и отвода от них груза, включающее в себя размещенные вдоль 0 торцов стеллажей грузонесущие органы, связанные между собой переходными секциями, установленными напротив проходов между стеллажами с возможностью перемещения в вертикальной плоскости для обра- 5 зования зоны проезда крана-штабелера, и устройство управления последним, отличающая с я тем, что, с целью снижения энергозатрат, переходные секции установлены напротив каждого прохода между 0 стеллажами попарно с возможностью плоскопараллельного перемещения и снабжены роликами, одни из которых закреплены на их верхней поверхности посредством вертикальных осей, а другие - на нижней 5 поверхности посредством горизонтальных осей, по обе стороны каждого прохода в зоне смежных грузонесущих органов смонтированы приводные фиксаторы верхних положений подвижых секций и датчики этих 0 положений, включенные в цепь управления этими приводами, а на колонне крана-штабелера смонтированы расположенные одна над другой копирные направляющие для контактирования с соответствующими ро- 5 ликами подвижных секций.
КО
I
uocfdV3$0a/f7i - wound
tswavpadufi л Ядшэпоашэйу Jос/энэдошт -auutfu о дорогое DI/ЭЛЬ vnuopoz внпт
I
оУрЖ
J1
| Заявка ФРГ № 2843201, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
