Изобретение относится к электротехнике и может быть ислсхльзовано в системах автоматизации технологичесзких процессов, например при регулировании соотнсацения скорости в многодвигательных линиях для обработки полимерных изделий, состоящих из отдельных технологических участков.
По основному авт.св. № 746853 известно ycTpt cTBO для подщержания. заданного соотношения скоростей в многодвигатель нсэм электроприводе, содержащее датчики скоростей, регуляторы двигателей, блок задания и стабилизации скорости ведущего двигателя, блоки формирования ускорений по числу двигателей, блок варьирования скоростей, блок стабилизации соотношения скоростей и блоки формирования ошибок по числу ведомых двигателей, причем регуляторы двигатепей подклкмены .з блоки формирования ускорений к блоку стабилизации соотношения скоростей и к блоку варьирования скоростей, а блок ста билизации соотношения скоростей соет линен с блоками Формирования ошибок, два входа каждого из которых подключены к датчикам скоростей двигателей, того, датчик скорости ведущего двигателя соединен с входом блока задания и стабилизации скорости ведущего двигателя, выход котсфого соединен с входом блока варьирования скоростей.
Устройство выполнено по двухуровневсяйу принципу управления. На первом уровне управления осуществляется поддержание заданного соотношения скоростей приводов, а йа втором уровне - стабилизация скорости ведущего привода. Оба уровня управления при работе устройства функционируют одновременно. Повышение точности поддержания заданного соотношения скоростей в таких устройствах производится путем уменьшения коэффициента связи между первым и вторым уровнями управления . Это приводит к понижению быстродействия при стабилизгщии скорости ведущего привода.
Цель изобретения - повышение быстродействия и качества регулирования за счёт построения переменной структуры управления. ,
$ казанная цбль достигается тем, что в устройство для поддержания заданного соотнсяиения скоростей в миогодвигательном электроприводе, содержащее датчики скоростей, регуляторы двигателей, блок задания и стабилизации скорости ведущего двигателя, блоки формирования ускорений по числу двигателей, блок варьированйя скоростей, блок стабилизации . соотношения скоростей и блоки формирования ехиибок ,ро числу ведомых двигателей , причем регуляторы двигателей подключены через блоки формирования ускорений к блоку стабилизации соотнсяиения скоростей и к блоку варьирб нания скЪростей, а блок стабилизации соотношения скоростей сое- динен с блоками формирования ошиЬок, два входа каждого из которых подключены к датчикам скоростей смежт х двигателей, креме TOfo, датчик скорости ведущего двигателя соединен с входом блока задания и стабилизации скорости ведущего двига,теля, выход которого соединен с входсал блока варьирования скоростей, дсшолнительно введены блок коквкутации и блок управления, входа которого ключены к выходам блоков формирования ошибок, а выход - к управляющему входу блока ксммутации, входы которого соединены с выходом блока варьирования скоростей, а выходы подключены к входам блоков формирования ускорений двигателей.
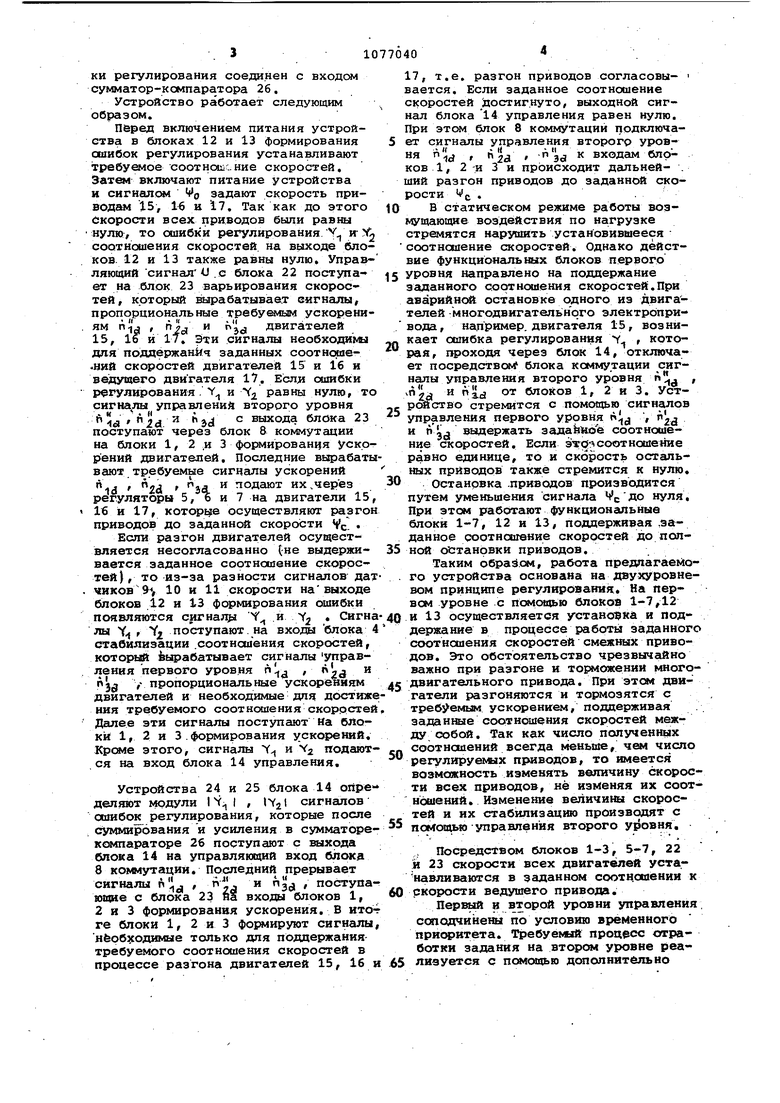
Креме того блок управления содержит определители модуля ошибок
регулирования, количество которых равно числу блоков .ования cufiбок, и сумматор-компаратор, причем выход каждого определителя модуля ошибки регулирования соединен с входом сумматора-к сялпаратора.
На фиг.1 изображена блок-схема устройства; на фиг.2 - функциональная схема блока управления.
Устройство содержит блоки 1, 2 и 3 1 1ирования ускорений, блок 4 стабилизации соотношения скоростей, регуляторы 5-7 двигателей, входы, которых подключены через блоки 1, 2 и
3 фо{яи ирования ускорений к блоку 4 : стабилизации соотношения скоростей .и к блоку 8 коммутации. Датчики 9, 10 и 11 скоростей попадзно подключены к входам блоков 12 и 13 формирования ошибок, выходы которых соединены с входами блока 4 стабилизации соотношенияскоростей и блока 14 управления. Шлходы регуляторов 5, б и 7 подключены к двигателям 15, 16 и 17, которые транспортируют обрабатываемый гибкий материгш 18 . посредством тянущих пар валков 19, 20 и 21. Двигатель 17 принят в качестве ведущего привода. Датчик 11 скорости соединен с входом блока 22
задания и стабилизации скорости ведущего двигателя, йлход блока 22 посредством блока 23 варьирования скоростей подключен к блоку 8 комМ5п:ации. Блок Ij4 управления; на. входе сЪдёржит определители 24 и 25 модуля смаибок регулирования, количество кО1ю1 ых равно числу блоков 12 и 13 формирования ошибок,и на выходе сумматор-ксжпаратор 26. Выход каждо.го определители 24 и 25 модуля сшибки регулирования соединен с входсм сумматор-компаратора 26, Устройство работает следующим образом. Перед включением питания устройства в блоках 12 и 13 формирования ошибок регулирования устанавливают требуемое COOTнетпсние скоростей. Затем включают питание устройства и сигиалом VQ задают скорость приводам 15, 16 и 17. Так как до этого Скорости всех приводов были равны нулю, то ошибки регулирования У и- COOT ноне ни я скоростей на выходе е5локов. 12 и 13 также равны нулю. Управляющий сигнал J. с блока 22 поступает на блок 23 варьирования скоростей, который вырабатывает еигнгшы, п ропорциональ ные тре бу етлым ус коре ниям , lij двигателей ям , и nj 15, 16 и 17. Эти сигналы необходима для поддержания заданных соотнрше-ний скоростей двигателей 15 и 16 и ведущего двигателя 17. Еслл ошибки регулирования , Y и Л равны нулю, то сигналы управлений второго уровня ici 2d 3dl выхода блока 23 поступают через блок 8 ко1«мутации на блоки 1, 2 ,и 3 формирования ускорений двигателей. Последние вьфабаты вают требуемые сигналы ускорений id Zd iSL подают их,через регуляторы 5, 6 и 7 на двигатели 15 « 1C и 17, KOTOpi e осуществляют разго приводов до заданной скорости Vc Если разгон двигателей осуществляется несогласованно (не выдерживается заданное соотношение скоростей), то из-за разности сигналов дат . чиков 9у 10 и 11 скорости на выходе блоков 12 и 3.3 формирования ошибки появляются сигналы Y и . Снгн лы Y , 1(2 поступают, на входа блока стабилизации .соотношения скоростей, KOTOpt вырабатывает сигналыуправления первого уровня nl, , и 35 пропорционсшьные ускорениям двигателей и необходимые дпч достиж ния требуемого соотношения скоростей Далее эти сигналы поступают Ма блоки 1, 2 и 3.формирования ускорений. Кроме этого, сигналы Ч и 2 подают ся на вход блока 14 управления. Устройства 24 и 25 блока 14 опре деляют модули 1Ч;,| , lYjl сигналов ошибок регулирования, которые после суммирования и усиления в сумматоре компараторе 26 поступает с гаахода блока 14 на управляющий вход блокд 8 колмутаций. Последний прерывает сигналы , п, и , поступа ю&(ие с блока 23 На входы блоков 1, 2 и 3 формирования ускорения. В ито ге блоки 1, 2 и 3 формируют сигналы нёрб}содимые только для поддержания требуемого соотношения скоростей в процессе разгона двигателей 15, 16 17, т.е. разгон приводов согласовывается. Если заданное соотношение скоростей цостиг.нуто, выходной сигнал блока 14 управления равен нулю. При этом блок 8 коммутаций подключает сигналы управления второго уровня , I Зо1 входам блоков 1, 2-й 3 и происходит дальней- . ший разгон приводов до заданной скорости W(j . В статическом режиме работы возмущающие воздействия по нагрузке стремятся нарушить установившееся соотношение скоростей. Однако действие функциональ(шх блоков первого уровня направлено на поддержание заданйого соотнояения скоростей.При аварийной остановке одного из двигателей многодвигательного электрбпривода, например, двигателя 15, возникает ошибка регулирования у , которая, проходя через блок 14, отключает посредствог блока коммутации сигналы управления второго уровня п , 3.13 ° блоков 1, 2 и 3. Устротство стремится с помощью сигналов управления первого уровня id и А 3 выдержать зада1 1оё соотношение скоростей. Если это: соотношение равно единице, то и скорость остальных приводов также стремится к нулю. Остановка .приводов производится путем уменьшения сигнала Vcдo нуля. При этом работают функциональные блоки 1-7, 12 и 13, поддерживая ,заданное соотношение скоростей до полной остановки приводов. Таким обра.см, работа предлагаекюго устройства основана на двухуровневом принципе регулирования На первом уровне с помощью блоков 1-7,12 и 13 осуществляется установка и поддержание в процессе работы заданного соотношения скоростей смежных приводов. Это обстоятельство чрезвычайно важно при разгоне и тор«{ожении многодвигательного привода. При этом двигатели разгоняются и тормозятся с Tpe6j eMbo«i ускорением, поддерживая заданные соотношения скоростей между собой. Так как число полученных соотношений всегда к(еньше, чем число регулируемых приводов, то имеется воэможиость изменять величину скорости всех приводов, не изменяя их соотношений. Изменение величины скоростей и их стабилизацию производят с помощью управления второго уровня. Посредством блоков 1-3, 5-7, 22 и 23 скорости всех двигателей устанавливаются в заданном соотн.ошении к скорости ведушего привода. Первый и второй уровни управления соподчинены по условию временного прнсфвтета. Требуеккяй процесс отработки задания на втором уровне реализуется с псмчощью дополнительно
введенных блоков 8 и 14 только тог- да, когда соблюдены заданные со отновения скоростей приводов на пер ом уровне. Построение системы управления устройством по указанному принципу приводит к новсМ переменное структуре управления. Благодаря такой структуре имеется возможность увеличить коэффициент связи между . уровнями управления и тем самым добиться как повышения точио гти поддер.жания эгщанного соотношенияскорос5 тей, так и быстродействия устройства в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе | 1977 |
|
SU746853A1 |
| Устройство для стабилизации соотношения натяжения движущегося материала в зонах многодвигательной технологической линии | 1982 |
|
SU1062159A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Многодвигательный электропривод | 1983 |
|
SU1104632A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Устройство для стабилизации соотношения натяжений движущегося материала в зонах многодвигательной технологической линии | 1979 |
|
SU874560A1 |
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2016 |
|
RU2624266C1 |
1. УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ЗАДАННОГО СООТНОШЕНИЯ СКОРОСТЕЙ б МНОГОДВИГАТЕЛЬНОМ ЭЛЕКТРОПРИВОДЕ ПО ав-г.св. 746853, отличающееся тем, что, с целью повышения быстродействия и качества регулирования за счет построения переменной структуры управления, в него дополнительно введены блок коммута 0. О 8ции и блок управления, входы которого подключены к выходам блоков форгмирования ошибок, выход - к управляющему входу блока коммутации, входы крторого соединены с выходом блока варьирования скоростей, а выходы подключены к входам блоков формирования ускорений двигателей. 2. Устройство по П.1, отличающееся тем, что блок управления содержит определители модуля ошибок регулирования, количество которых равно числу блоков формирования ошибок, и сумматор-компаратор, причем выход каждого определителя модуля ошибок регулирования соединен с 3 с входом сумматора-компаратора. (Л -vl -vl
